一种路径规划方法、装置、车辆及可读存储介质与流程
本发明涉及自动驾驶,具体涉及一种路径规划方法、装置、电子设备及可读存储介质。
背景技术:
1、随着科技的发展,车辆在车道内的智能驾驶技术日渐成熟,比如车道保持、自适应巡航、车道居中等辅助驾驶技术已得到广泛应用,而变道作为车辆驾驶过程中最重要的行为之一,不仅需要在原车道和目标车道内行驶,还需要跨车道行驶,场景复杂多变且对安全性的要求更高。
2、路径规划是自动变道过程中的重要环节,目前主要车道线定位确定第一参考线,然后通过多项式曲线拟合方法,计算不同路径的代价函数,并从中选择出平滑且最优的变道规划路径。
3、但是,相关技术在确定变道规划路径时,通过多项式曲线拟合方法确定变道规划路径方式需要对多条不同路径对应的多项式函数进行计算,需要占用大量的计算资源,计算效率低。
技术实现思路
1、本发明的目的之一在于提供一种路径规划方法,以解决现有技术中进行变道路径规划时需要占用大量的计算资源,计算效率低的问题;目的之二在于提供一种装置;目的之三在于提供一种车辆;目的之四在于提供一种可读存储介质。
2、为了实现上述目的,本发明采用的技术方案如下:
3、一种路径规划方法,应用于车辆,所述方法包括:
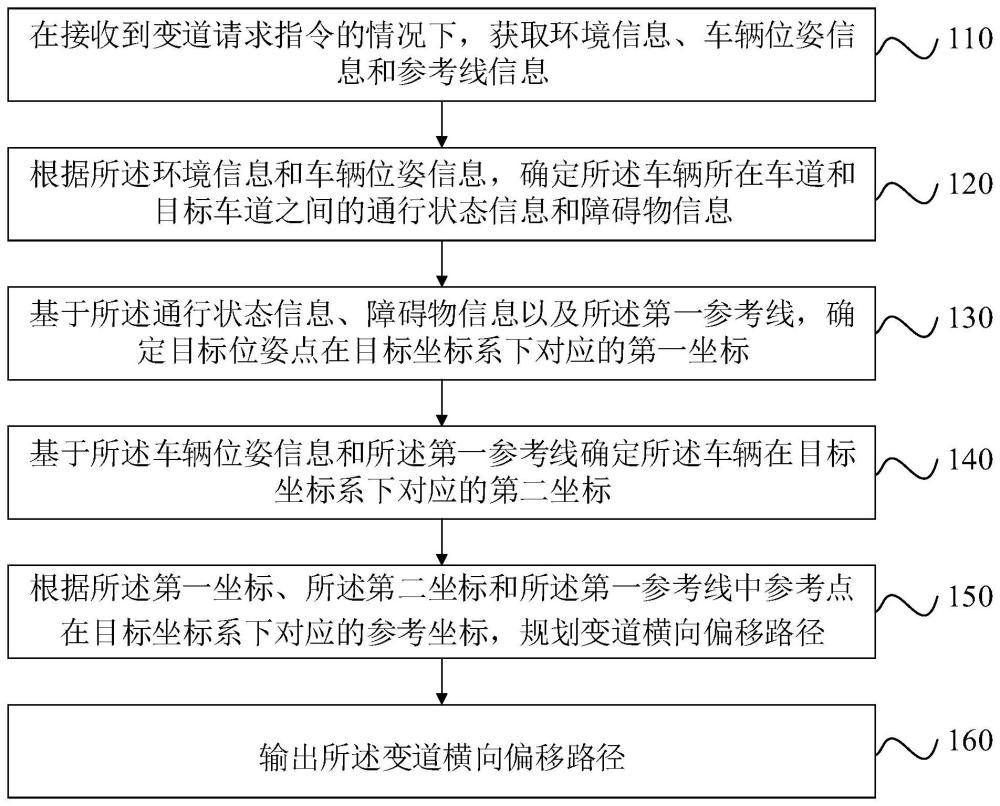
4、在接收到变道请求指令的情况下,获取环境信息、车辆位姿信息和参考线信息;所述参考线信息包括所述车辆所在车道的第一参考线;
5、根据所述环境信息和车辆位姿信息,确定所述车辆所在车道和目标车道之间的通行状态信息和障碍物信息;
6、基于所述通行状态信息、障碍物信息以及所述第一参考线,确定目标位姿点在目标坐标系下对应的第一坐标;
7、基于所述车辆位姿信息和所述第一参考线确定所述车辆在目标坐标系下对应的第二坐标;
8、根据所述第一坐标、所述第二坐标和所述第一参考线中参考点在目标坐标系下对应的参考坐标,规划变道横向偏移路径;
9、输出所述变道横向偏移路径。
10、根据上述技术手段,在确定目标位姿点在目标坐标系下对应的第一坐标时,充分考虑了车辆所在车道和目标车道之间的通行状态信息和障碍物信息,确保了后续根据第一坐标、第二坐标和第一参考线中参考点在目标坐标系下对应的参考坐标,规划的变道横向偏移路径的合理性和安全性,能在安全躲避障碍物的前提下,实现借道绕行并及时回到主车道,从而保证车辆行驶的安全性和流畅性,提升用户体验;同时,变道横向偏移路径规划时所需的参数为目标位姿点在目标坐标系下对应的第一坐标、车辆在目标坐标系下对应的第二坐标和第一参考线中参考点在目标坐标系下对应的参考坐标,易于获得,计算量小,占用较小的计算资源,提高了变道横向偏移路径规划效率。
11、进一步,所述根据所述第一坐标、所述第二坐标和所述第一参考线中参考点在目标坐标系下对应的参考坐标,规划变道横向偏移路径,包括:
12、根据所述第一坐标,确定经过所述第一坐标的第一圆弧的第一圆弧信息;
13、根据所述第二坐标,确定经过所述第二坐标的第二圆弧的第二圆弧信息;
14、基于所述第一圆弧信息、所述第二圆弧信息和所述第一参考线中参考点在目标坐标系下对应的参考坐标,规划变道横向偏移路径。
15、根据上述技术手段,根据目标位姿点在目标坐标系下对应的第一坐标和车辆在目标坐标系下对应的第二坐标,分别确定了经过第一坐标的第一圆弧的第一圆弧信息和经过第二坐标的第二圆弧的第二圆弧信息,之后可以基于第一圆弧信息、第二圆弧信息和第一参考线中参考点在目标坐标系下对应的参考坐标,规划变道横向偏移路径。根据坐标信息确定在目标坐标系下经过该坐标的圆弧,并进一步确定了该圆弧的圆弧信息,所需的计算参数容易获得,而且计算量相对较小,降低了进行变道横向偏移路径规划时占用的计算资源。
16、进一步,第一圆弧信息包括所述第一圆弧的第一半径和第一圆心坐标;所述第二圆弧信息包括所述第二圆弧的第二半径和第二圆心坐标;
17、所述基于所述第一圆弧信息、所述第二圆弧信息和所述第一参考线中参考点在目标坐标系下对应的参考坐标,规划变道横向偏移路径,包括:
18、基于所述第一半径、所述第一圆心坐标、所述第二半径和所述第二圆心坐标,确定与所述第一圆弧和所述第二圆弧外切的切线对应的切线信息;所述切线信息包括所述切线的倾角、所述切线与所述第一圆弧相切的第一切点坐标和所述切线与所述第二圆弧相切的第二切点坐标;
19、基于所述切线信息、所述第一圆弧信息、所述第二圆弧信息以及所述第一参考线中参考点在目标坐标系下对应的参考坐标,规划变道横向偏移路径。
20、根据上述技术手段,根据第一圆弧信息和第二圆弧信息进一步确定了与两个圆弧外切的切线以及切线信息,由此形成的“圆弧-直线-圆弧”的变道路径相对简单,所采用的几何规划方法可以显著提高变道路径规划效率,并且占用更小的内存,能更好地满足智能驾驶车辆的高实时性要求。
21、进一步,所述基于所述切线信息、所述第一圆弧信息、所述第二圆弧信息以及所述第一参考线中参考点在目标坐标系下对应的参考坐标,规划变道横向偏移路径,包括:
22、在所述参考坐标的参考纵坐标大于或等于所述第一圆心坐标的第一圆心纵坐标,且小于所述第一切点坐标的第一切点纵坐标的情况下,根据所述第一圆弧信息确定与所述参考纵坐标对应的第一横向偏移点坐标;
23、在所述参考坐标的参考纵坐标大于或等于所述第一切点坐标的第一切点纵坐标,且小于所述第二切点坐标的第二切点纵坐标的情况下,根据所述切线信息确定与所述参考纵坐标对应的第二横向偏移点坐标;
24、在所述参考坐标的参考纵坐标大于或等于所述第二切点坐标的第二切点纵坐标,且小于所述第二圆心坐标的第二圆心纵坐标的情况下,根据所述第二圆弧信息确定与所述参考纵坐标对应的第三横向偏移点坐标;
25、将所述第一横向偏移点坐标、所述第二横向偏移点坐标和所述第三横向偏移点坐标形成的曲线,确定为所述变道横向偏移路径。
26、根据上述技术手段,可以确定第一参考线中所有参考点对应的横向偏移点坐标,基于参考点坐标进一步确定了车辆的变道横向偏移路径,计算过程相对简单,提高了变道横向偏移路径规划效率。
27、进一步,所述参考线信息还包括车道信息,所述车道信息包括主车道和非主车道,以及所述车辆所在车道的车道宽度;
28、所述获取所述车辆所在车道的第一参考线,包括:
29、在所述车道信息为主车道的情况下,调用高精地图组件获取第二参考线,作为所述车辆所在车道的第一参考线;
30、在所述车道信息为非主车道的情况下,调用高精地图组件获取第二参考线,以及从所述车道信息中获取所述车道宽度;
31、将所述第二参考线对应的横坐标沿预设方向偏移一个所述车道宽度,作为所述车辆所在车道的第一参考线。
32、根据上述技术手段,基于车辆所在车道为主车道和非主车道的情况,以及高精地图组件的全局路径规划方法获得的参考线,具有更好的精度和抗干扰性,可显著提升后续变道路径规划的速度,为车辆在复杂变道场景的路径规划提供保障,保证了后续规划的变道横向偏移路径的准确性。
33、进一步,所述通行状态信息包括可行驶区域信息;
34、所述基于所述通行状态信息、障碍物信息以及所述第一参考线,确定目标位姿点在目标坐标系下对应的第一坐标,包括:
35、基于所述障碍物信息和所述第一参考线,确定各障碍物在目标坐标系下的第三坐标;
36、基于所述可行驶区域信息和所述第一参考线,确定各可行驶区域在目标坐标系下的第四坐标;
37、根据所述第三坐标和所述第四坐标,确定目标位姿点对应的第一坐标。
38、根据上述技术手段,基于各障碍物在目标坐标系下的第三坐标和各可行驶区域在目标坐标系下的第四坐标,对目标位姿点对应的第一坐标进行确定,保证了目标位姿点对应的第一坐标的合理性,确保后续根据第一坐标规划的变道横向偏移路径的合理性和安全性。
39、进一步,所述根据所述第三坐标和所述第四坐标,确定目标位姿点对应的第一坐标,包括:
40、获取各障碍物在目标坐标系下的各第三坐标的纵坐标;
41、基于所述纵坐标确定所述障碍物封堵区域对应的纵坐标范围;
42、确定各可行驶区域在目标坐标系下的各第四坐标中与所述纵坐标范围对应的所述可行驶区域对应的横坐标范围;
43、确定所述横坐标范围对应的通行宽度最大值;
44、在所述通行宽度最大值符合预设车辆安全通行宽度的情况下,确定所述目标位姿点对应的第一坐标的第一纵坐标为所述纵坐标范围的最大值;
45、确定所述目标位姿点对应的第一坐标的第一横坐标为所述横坐标范围最大值和最小值之和的二分之一。
46、根据上述技术手段,确保车辆从当前位置到达目标位姿点对应的第一坐标位置处的路径为符合预设辆安全通行宽度,防止碰撞事故的发生,进一步保证了规划的变道横向偏移路径的安全性。
47、一种路径规划装置,应用于车辆,所述装置包括:
48、信息获取模块,用于在接收到变道请求指令的情况下,获取环境信息、车辆位姿信息和参考线信息;所述参考线信息包括所述车辆所在车道的第一参考线;
49、信息确定模块,用于根据所述环境信息和车辆位姿信息,确定所述车辆所在车道和目标车道之间的通行状态信息和障碍物信息;
50、第一坐标确定模块,用于基于所述通行状态信息、障碍物信息以及第一参考线,确定目标位姿点在目标坐标系下对应的第一坐标;
51、第二坐标确定模块,用于基于所述车辆位姿信息和所述第一参考线确定的所述车辆在目标坐标系下对应的第二坐标;
52、路径规划模块,用于根据所述第一坐标、所述第二坐标和所述第一参考线中参考点在目标坐标系下对应的参考坐标,规划变道横向偏移路径;
53、路径输出模块,用于输出所述变道横向偏移路径。
54、根据上述技术手段,在确定目标位姿点在目标坐标系下对应的第一坐标时,充分考虑了车辆所在车道和目标车道之间的通行状态信息和障碍物信息,确保了后续根据第一坐标、第二坐标和第一参考线中参考点在目标坐标系下对应的参考坐标,规划的变道横向偏移路径的合理性和安全性,能在安全躲避障碍物的前提下,实现借道绕行并及时回到主车道,从而保证车辆行驶的安全性和流畅性,提升用户体验;同时,变道横向偏移路径规划时所需的参数为目标位姿点在目标坐标系下对应的第一坐标、车辆在目标坐标系下对应的第二坐标和第一参考线中参考点在目标坐标系下对应的参考坐标,易于获得,计算量小,提高了变道横向偏移路径规划效率,通过占用较小的计算资源,即可实现高实时性的变道横向偏移路径规划。
55、一种路径规划系统,应用于车辆,所述系统包括:变道横向路径规划组件;
56、所述变道横向路径规划组件用于,在接收到变道请求指令的情况下,获取环境信息、车辆位姿信息和参考线信息;所述参考线信息包括所述车辆所在车道的第一参考线;根据所述环境信息和车辆位姿信息,确定所述车辆所在车道和目标车道之间的通行状态信息和障碍物信息;并基于所述通行状态信息、障碍物信息以及第一参考线,确定目标位姿点在目标坐标系下对应的第一坐标;以及基于所述车辆位姿信息和所述第一参考线确定的所述车辆在目标坐标系下对应的第二坐标;根据所述第一坐标、所述第二坐标和所述第一参考线中参考点在目标坐标系下对应的参考坐标,规划变道横向偏移路径;并输出所述变道横向偏移路径。
57、根据上述技术手段,通过变道横向路径规划组件,实现了规划的变道横向偏移路径在安全躲避障碍物的前提下,保证车辆行驶的安全性和流畅性,提升用户体验;同时,变道横向偏移路径规划时所需的参数为目标位姿点在目标坐标系下对应的第一坐标、车辆在目标坐标系下对应的第二坐标和第一参考线中参考点在目标坐标系下对应的参考坐标,易于获得,计算量小,提高了变道横向偏移路径规划效率,通过占用较小的计算资源,即可实现高实时性的变道横向偏移路径规划。
58、进一步,所述路径规划系统还包括:变道决策组件、变道横向控制组件、定位组合、感知组件和高精地图组件;
59、所述高精地图组件用于,根据所述车辆的起始位置和终点位置确定第二参考线以及车道信息;
60、所述感知组件用于,感知并确定所述车辆所处环境的环境信息;
61、所述定位组件用于,确认所述车辆的位姿信息;
62、所述变道决策组件用于,基于所述高精地图组件确定的第二参考线和所述车道信息、所述感知组件确定的所述环境信息和所述定位组件确定的所述车辆的位姿信息,向所述变道横向路径规划组件发送变道请求指令;以及在接收到所述变道横向路径规划组件反馈的变道横向偏移路径规划成功状态信号之后,向所述变道横向控制组件发送变道请求指令;
63、所述变道横向路径规划组件具体用于,在接收到变道决策组件发送的变道请求指令的情况下,从所述感知组件获取环境信息、从所述定位组件获取车辆位姿信息、从所述高精地图组件获取第二参考线以及车道信息;以及根据所述第二参考线和所述车道确定所述参考线信息;并向所述变道横向控制组件输出所述变道横向偏移路径;
64、所述变道横向控制组件用于,接收变道横向路径规划组件输出的所述变道横向偏移路径和所述变道决策组件发送的变道请求指令,根据所述变道横向偏移路径控制所述车辆执行变道操作。
65、根据上述技术手段,基于路径规划系统各组件之间的交互配合,确保了规划的变道横向偏移路径的合理性和安全性,能在安全躲避障碍物的前提下,实现借道绕行并及时回到主车道,从而保证车辆行驶的安全性和流畅性,提升用户体验;同时,变道横向偏移路径规划时所需的参数为目标位姿点在目标坐标系下对应的第一坐标、车辆在目标坐标系下对应的第二坐标和第一参考线中参考点在目标坐标系下对应的参考坐标,易于获得,计算量小,提高了变道横向偏移路径规划效率,通过占用较小的计算资源,即可实现高实时性的变道横向偏移路径规划。
66、一种车辆,所述车辆包括电子设备,所述电子设备包括存储器和处理器,所述存储器用于存储计算机程序,所述处理器用于调用并运行所述存储器中存储的计算机程序,所述处理器执行所述计算机程序时实现如上任一项所述的路径规划方法。
67、一种可读存储介质,所述可读存储介质存储有计算机程序,所述计算机程序被处理器执行时实现如上任一项所述的路径规划方法。
68、本发明的有益效果:
69、本发明在确定目标位姿点在目标坐标系下对应的第一坐标时,充分考虑了车辆所在车道和目标车道之间的通行状态信息和障碍物信息,确保了后续根据第一坐标、第二坐标和第一参考线中参考点在目标坐标系下对应的参考坐标,规划的变道横向偏移路径的合理性和安全性,能在安全躲避障碍物的前提下,实现借道绕行并及时回到主车道,从而保证车辆行驶的安全性和流畅性,提升用户体验;同时,变道横向偏移路径规划时所需的参数为目标位姿点在目标坐标系下对应的第一坐标、车辆在目标坐标系下对应的第二坐标和第一参考线中参考点在目标坐标系下对应的参考坐标,易于获得,计算量小,占用较小的计算资源,提高了变道横向偏移路径规划效率。
- 还没有人留言评论。精彩留言会获得点赞!