自动驾驶车辆的环境信息预测、控制方法、装置及车辆与流程
本发明涉及自动驾驶,具体提供一种自动驾驶车辆环境信息预测、控制方法、装置及车辆。
背景技术:
1、随着自动驾驶技术的发展,未来自动驾驶车辆上会安装越来越多的传感器,如雷达、激光雷达、高精度地图、高精度惯导imu(inertial measurement unit)等。得益于图像处理技术、目标融合技术、定位技术的突破发展,获取多维度感知信息已经触手可及,而利用这些丰富的信息也为获取更为准确稳定的车辆环境模型提供了条件。同时基于这些环境模型的构建基础上,对周围交通参与者在环境道路上的行为预测提供了基础,这样会对行驶在公共道路上的自动驾驶车辆的提供更为稳定可靠的保证。
2、车辆环境模型在自动驾驶车辆的行为规划和控制中起到了非常重要的作用,其可以预测本车和周围车辆的行驶轨迹,进而对行驶轨迹上的道路特征障碍物信息进行获取和轨迹预测,为下一个阶段的车辆决策运动提供输入,最终实现自动驾驶车辆的转向控制、驱动控制、制动控制等控制过程。
3、目前,车辆环境模型没有很好的标准化形式,其大部分没有考虑到交通参与者的运动状态预测,早期仅是依赖单一信息预测:如基于车身运动状态信息如车速、横摆角速度信息获取等,这些都是基于当前车辆状态的一种稳态估计方法,没有很好的表征未来车辆运动趋势;而基于道路属性等感知信息虽然能够表征未来一定时空下的道路信息,但受限于障碍物、天气等,获取的环境模型鲁棒性受限。同时,应用多种信息获取环境模型受限于不同类型感知信息获取信息不统一,很难对多个输入信息进行融合使用。
4、相应地,本领域需要一种新的自动驾驶车辆环境模型构建方案来解决上述问题。
技术实现思路
1、为了克服上述缺陷,提出了本发明,以提供解决或至少部分地解决如何结合多种信息构建自动驾驶车辆的环境模型,从而对环境信息实现充分考虑,并提升模型鲁棒性的问题。
2、在第一方面,本发明提供一种自动驾驶车辆的环境信息预测方法,所述方法包括:
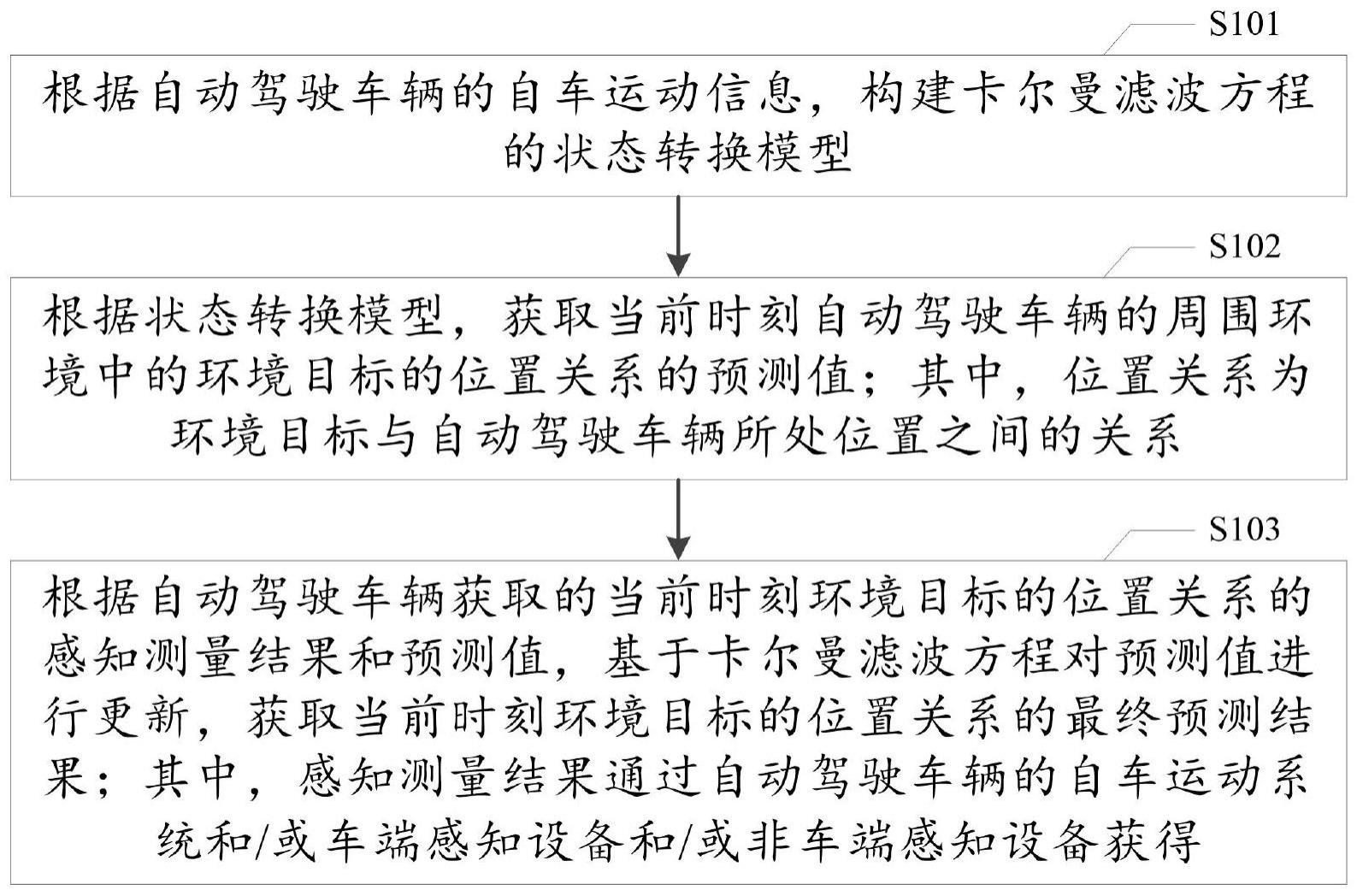
3、根据所述自动驾驶车辆的自车运动信息,构建卡尔曼滤波方程的状态转换模型;
4、根据所述状态转换模型,获取当前时刻所述自动驾驶车辆的周围环境中的环境目标的位置关系的预测值;其中,所述位置关系为所述环境目标与所述自动驾驶车辆所处位置之间的关系;
5、根据所述自动驾驶车辆获取的当前时刻所述环境目标的位置关系的感知测量结果和所述预测值,基于卡尔曼滤波方程对所述预测值进行更新,获取当前时刻所述环境目标的位置关系的最终预测结果;
6、其中,所述感知测量结果通过所述自动驾驶车辆的自车运动系统和/或车端感知设备和/或非车端感知设备获得。
7、在上述自动驾驶车辆的环境信息预测方法的一个技术方案中,所述环境目标包括预设的预瞄时间内所述自动驾驶车辆的预测轨迹点,所述位置关系包括所述预测轨迹点相对于所述自动驾驶车辆的纵向距离和朝向角;
8、所述方法还包括:
9、根据所述自动驾驶车辆的自车运动系统,获取所述自动驾驶车辆的车速和偏航角;
10、根据所述车速和所述偏航角,获取所述自动驾驶车辆的自车行驶半径;
11、根据所述自车行驶半径,获取所述自动驾驶车辆的车辆行驶轨迹;
12、根据所述车辆行驶轨迹,在所述车辆行驶轨迹的前后预瞄时间内获取所述自动驾驶车辆前后的预测轨迹点的纵向距离和朝向角,作为所述预测轨迹点的感知测量结果。
13、在上述自动驾驶车辆的环境信息预测方法的一个技术方案中,“根据所述车速和偏航角,获取所述自动驾驶车辆的自车行驶半径”的步骤包括:
14、基于所述自动驾驶车辆做定圆运动假设,根据所述车速和偏航角,获取每个时刻的所述自车行驶半径。
15、在上述自动驾驶车辆的环境信息预测方法的一个技术方案中,其特征在于,所述环境目标包括道路属性,所述位置关系包括所述道路属性相对于所述自动驾驶车辆的纵向距离和朝向角;
16、所述方法还包括:
17、根据所述自动驾驶车辆的车端感知设备,获取所述道路属性的感知数据;
18、将所述感知数据离散化,根据所述道路属性的多个离散点;
19、根据所述多个离散点,获取所述离散点相对于所述自动驾驶车辆的纵向距离和朝向角,作为所述道路属性的感知测量结果。
20、在上述自动驾驶车辆的环境信息预测方法的一个技术方案中,所述环境目标包括交通参与者,所述位置关系包括所述交通参与者相对于所述自动驾驶车辆的纵向距离和朝向角;
21、所述方法还包括:
22、根据所述自动驾驶车辆的车端感知设备,获取所述交通参与者的感知信息;
23、根据交通参与者的感知信息,获取相邻采样时间的两帧感知信息中所述交通参与者的位移;
24、根据所述自动驾驶车辆的当前位置和所述位移,获取所述交通参与者相对于所述自动驾驶车辆的纵向距离和朝向角,作为所述交通参与者的感知测量结果。
25、在上述自动驾驶车辆的环境信息预测方法的一个技术方案中,所述交通参与者包括非变道车辆;
26、所述方法还包括:
27、获取所述自动驾驶车辆的周围车辆的运动速度以及所述周围车辆的当前时刻与上一时刻之间的夹角;
28、将所述运动速度大于预设速度且夹角小于预设夹角的周围车辆,作为所述非变道车辆。
29、在上述自动驾驶车辆的环境信息预测方法的一个技术方案中,“根据所述自动驾驶车辆当前时刻的感知测量结果和所述预测值,基于卡尔曼滤波方程对所述预测值进行更新”的步骤包括:
30、根据所述非变道车辆的多个朝向角,获取所述朝向角的均值及方差;
31、根据所述均值和预设均值,确定有效非变道车辆;
32、根据所述有效非变道车辆的纵向距离和朝向角,对所述预测值进行更新。
33、在上述自动驾驶车辆的环境信息预测方法的一个技术方案中,“根据所述有效非变道车辆的纵向距离和朝向角,对所述预测值进行更新”的步骤包括:
34、将所述非变道车辆的朝向角的方差作为所述卡尔曼滤波方程进行更新的噪声;
35、根据所述噪声,以及所述有效非变道车辆的纵向距离和朝向角,对所述预测值进行更新。
36、在上述自动驾驶车辆的环境信息预测方法的一个技术方案中,所述环境目标包括车道路径,所述位置关系包括所述车道路径与所述自动驾驶车辆的纵向距离和朝向角;
37、所述方法还包括:
38、根据所述自动驾驶车辆的非车端感知设备,获取所述自动驾驶车辆的行驶路径;
39、根据所述自动驾驶车辆的当前位置和所述行驶路径,获取所述自动驾驶车辆当前所在车道以及周围车道的车道路径离散点;
40、将所述车道路径离散点相对于所述自动驾驶车辆的纵向距离和朝向角,作为所述车道路径的感知测量结果。
41、在上述自动驾驶车辆的环境信息预测方法的一个技术方案中,“根据所述自动驾驶车辆的当前位置和所述行驶路径,获取所述自动驾驶车辆当前所在车道以及周围车道的车道路径离散点”的步骤包括:
42、当道路合并时,根据所述当前位置获取所述自动驾驶车辆的后方的车道路径离散点;
43、“将所述车道路径离散点相对于所述自动驾驶车辆的纵向距离和朝向角,作为所述车道路径的感知测量结果”的步骤包括:
44、将所述后方的车道路径离散点相对于所述自动驾驶车辆的纵向距离和朝向角,作为所述车道路径的感知测量结果。
45、在上述自动驾驶车辆的环境信息预测方法的一个技术方案中,在“根据所述状态转换模型,获取当前时刻所述自动驾驶车辆的周围环境中的环境目标的位置关系的预测值”的步骤之前,所述方法还包括:
46、对所述环境目标的感知测量信息进行初始化;
47、基于所述初始化结果,对所述感知测量信息的获取设备的有效性进行判定。
48、在上述自动驾驶车辆的环境信息预测方法的一个技术方案中,“对所述感知测量信息的获取设备的有效性进行判定”的步骤包括:
49、当所述获取设备为所述自动驾驶车辆的车端感知设备时,根据所述车端感知设备的初始置信度和环境信息,获取所述车端感知设备的综合置信度;
50、根据所述综合置信度,判断所述车端感知设备的有效性;和/或,
51、当所述获取设备为地图匹配系统时,根据所述地图匹配系统中不同地图之间的通信情况以及所述自动驾驶车辆的定位系统是否正常工作以及当前道路是否有高精度地图覆盖来判断所述有效性。
52、在上述自动驾驶车辆的环境信息预测方法的一个技术方案中,“根据所述自动驾驶车辆获取的当前时刻所述环境目标的位置关系的感知测量结果和所述预测值,基于卡尔曼滤波方程对所述预测值进行更新,获取当前时刻所述环境目标的位置关系的最终预测结果”的步骤之前,所述方法包括:
53、获取所述感知测量结果的置信度;
54、根据所述置信度,选择性地应用所述感知测量结果对所述预测值进行更新,以获取所述最终预测结果。
55、在上述自动驾驶车辆的环境信息预测方法的一个技术方案中,所述环境目标包括运动目标和静止目标,“根据所述自动驾驶车辆获取的当前时刻所述环境目标的位置关系的感知测量结果和所述预测值,基于卡尔曼滤波方程对所述预测值进行更新,获取当前时刻所述环境目标的位置关系的最终预测结果”的步骤包括:
56、根据所述运动目标的感知测量结果对所述预测值进行更新,获取所述运动目标的更新后的预测值;
57、根据所述运动目标的更新后的预测值和所述静止目标所处位置相对于所述自动驾驶车辆的位置关系,获取所述最终预测结果。
58、在第二方面,本发明提供一种自动驾驶车辆的控制方法,所述方法包括:
59、根据上述自动驾驶车辆的环境信息预测方法技术方案中任一项所述的自动驾驶车辆的环境信息预测方法,获取所述自动驾驶车辆的周围环境中的环境目标的最终预测结果;
60、根据所述最终预测结果,对所述自动驾驶车辆进行控制。
61、在上述自动驾驶车辆的控制方法的一个技术方案中,“根据所述最终预测结果,对所述自动驾驶车辆进行控制”的步骤包括:
62、根据所述最终预测结果,对所述环境目标进行编码;
63、根据所述编码结果,对所述自动驾驶车辆进行控制。
64、在上述自动驾驶车辆的控制方法的一个技术方案中,“所述环境目标为所述自动驾驶车辆的周围车辆;“根据所述最终预测结果,对所述环境目标进行编码”的步骤包括:
65、根据所述周围车辆的最终预测结果,获取所述周围车辆的朝向角;
66、根据所述朝向角和预设的夹角阈值,对所述周围车辆进行编码。
67、在第三方面,提供一种控制装置,该控制装置包括处理器和存储装置,所述存储装置适于存储多条程序代码,所述程序代码适于由所述处理器加载并运行以执行上述自动驾驶车辆的环境信息预测方法的技术方案中任一项技术方案所述的自动驾驶车辆的环境信息预测方法或上述自动驾驶车辆的控制方法的技术方案中任一项技术方案所述的自动驾驶车辆的控制方法。
68、在第四方面,提供一种计算机可读存储介质,该计算机可读存储介质其中存储有多条程序代码,所述程序代码适于由处理器加载并运行以执行上述自动驾驶车辆的环境信息预测方法的技术方案中任一项技术方案所述的自动驾驶车辆的环境信息预测方法或上述自动驾驶车辆的控制方法的技术方案中任一项技术方案所述的自动驾驶车辆的控制方法。
69、在第五方面,提供一种车辆,所述车辆包括上述控制装置技术方案中的控制装置。
70、本发明上述一个或多个技术方案,至少具有如下一种或多种有益效果:
71、在实施本发明的技术方案中,本发明根据自动驾驶车辆的自车运动信息来构建卡尔曼滤波方程的状态转换模型,根据状态转换模型获取当前时刻的自动驾驶车辆的周围环境中环境目标的位置关系的预测值,基于预测值和当前时刻位置关系的感知测量结果,应用卡尔曼滤波方程对预测值进行更新,获得当前时刻环境目标的位置关系的最终预测结果,其中,感知测量结果可以通过自车运动系统、车端感知设备和非车端感知设备获得。通过上述配置方式,本发明基于卡尔曼滤波模型对自动驾驶车辆周围环境中的环境目标与自动驾驶车辆的之间的位置关系进行预测,并基于自动驾驶车辆多维度的感知测量结果来对环境目标的位置关系的预测值进行更新,能够对自动驾驶车辆周围环境中的环境目标的运动趋势实现更为全面地预测,具有更高的鲁棒性;同时能够基于环境信息的最终预测结果对自动驾驶车辆进行控制,能够为自动驾驶车辆的控制过程提供更为全面、稳定、可靠的控制输入,实现更为有效地控制。
72、方案1.一种自动驾驶车辆的环境信息预测方法,其特征在于,所述方法包括:
73、根据所述自动驾驶车辆的自车运动信息,构建卡尔曼滤波方程的状态转换模型;
74、根据所述状态转换模型,获取当前时刻所述自动驾驶车辆的周围环境中的环境目标的位置关系的预测值;其中,所述位置关系为所述环境目标与所述自动驾驶车辆所处位置之间的关系;
75、根据所述自动驾驶车辆获取的当前时刻所述环境目标的位置关系的感知测量结果和所述预测值,基于卡尔曼滤波方程对所述预测值进行更新,获取当前时刻所述环境目标的位置关系的最终预测结果;
76、其中,所述感知测量结果通过所述自动驾驶车辆的自车运动系统和/或车端感知设备和/或非车端感知设备获得。
77、方案2.根据方案1所述的自动驾驶车辆的环境信息预测方法,其特征在于,所述环境目标包括预设的预瞄时间内所述自动驾驶车辆的预测轨迹点,所述位置关系包括所述预测轨迹点相对于所述自动驾驶车辆的纵向距离和朝向角;
78、所述方法还包括:
79、根据所述自动驾驶车辆的自车运动系统,获取所述自动驾驶车辆的车速和偏航角;
80、根据所述车速和所述偏航角,获取所述自动驾驶车辆的自车行驶半径;
81、根据所述自车行驶半径,获取所述自动驾驶车辆的车辆行驶轨迹;
82、根据所述车辆行驶轨迹,在所述车辆行驶轨迹的前后预瞄时间内获取所述自动驾驶车辆前后的预测轨迹点的纵向距离和朝向角,作为所述预测轨迹点的感知测量结果。
83、方案3.根据方案2所述的自动驾驶车辆的环境信息预测方法,其特征在于,“根据所述车速和偏航角,获取所述自动驾驶车辆的自车行驶半径”的步骤包括:
84、基于所述自动驾驶车辆做定圆运动假设,根据所述车速和偏航角,获取每个时刻的所述自车行驶半径。
85、方案4.根据方案1所述的自动驾驶车辆的环境信息预测方法,其特征在于,所述环境目标包括道路属性,所述位置关系包括所述道路属性相对于所述自动驾驶车辆的纵向距离和朝向角;
86、所述方法还包括:
87、根据所述自动驾驶车辆的车端感知设备,获取所述道路属性的感知数据;
88、将所述感知数据离散化,根据所述道路属性的多个离散点;
89、根据所述多个离散点,获取所述离散点相对于所述自动驾驶车辆的纵向距离和朝向角,作为所述道路属性的感知测量结果。
90、方案5.根据方案1所述的自动驾驶车辆的环境信息预测方法,其特征在于,所述环境目标包括交通参与者,所述位置关系包括所述交通参与者相对于所述自动驾驶车辆的纵向距离和朝向角;
91、所述方法还包括:
92、根据所述自动驾驶车辆的车端感知设备,获取所述交通参与者的感知信息;
93、根据交通参与者的感知信息,获取相邻采样时间的两帧感知信息中所述交通参与者的位移;
94、根据所述自动驾驶车辆的当前位置和所述位移,获取所述交通参与者相对于所述自动驾驶车辆的纵向距离和朝向角,作为所述交通参与者的感知测量结果。
95、方案6.根据方案5所述的自动驾驶车辆的环境信息预测方法,其特征在于,所述交通参与者包括非变道车辆;
96、所述方法还包括:
97、获取所述自动驾驶车辆的周围车辆的运动速度以及所述周围车辆的当前时刻与上一时刻之间的夹角;
98、将所述运动速度大于预设速度且夹角小于预设夹角的周围车辆,作为所述非变道车辆。
99、方案7.根据方案6所述的自动驾驶车辆的环境信息预测方法,其特征在于,“根据所述自动驾驶车辆当前时刻的感知测量结果和所述预测值,基于卡尔曼滤波方程对所述预测值进行更新”的步骤包括:
100、根据所述非变道车辆的多个朝向角,获取所述朝向角的均值及方差;
101、根据所述均值和预设均值,确定有效非变道车辆;
102、根据所述有效非变道车辆的纵向距离和朝向角,对所述预测值进行更新。
103、方案8.根据方案7所述的自动驾驶车辆的环境信息预测方法,其特征在于,“根据所述有效非变道车辆的纵向距离和朝向角,对所述预测值进行更新”的步骤包括:
104、将所述非变道车辆的朝向角的方差作为所述卡尔曼滤波方程进行更新的噪声;
105、根据所述噪声,以及所述有效非变道车辆的纵向距离和朝向角,对所述预测值进行更新。
106、方案9.根据方案1所述的自动驾驶车辆的环境信息预测方法,其特征在于,所述环境目标包括车道路径,所述位置关系包括所述车道路径与所述自动驾驶车辆的纵向距离和朝向角;
107、所述方法还包括:
108、根据所述自动驾驶车辆的非车端感知设备,获取所述自动驾驶车辆的行驶路径;
109、根据所述自动驾驶车辆的当前位置和所述行驶路径,获取所述自动驾驶车辆当前所在车道以及周围车道的车道路径离散点;
110、将所述车道路径离散点相对于所述自动驾驶车辆的纵向距离和朝向角,作为所述车道路径的感知测量结果。
111、方案10.根据方案9所述的自动驾驶车辆的环境信息预测方法,其特征在于,
112、“根据所述自动驾驶车辆的当前位置和所述行驶路径,获取所述自动驾驶车辆当前所在车道以及周围车道的车道路径离散点”的步骤包括:
113、当道路合并时,根据所述当前位置获取所述自动驾驶车辆的后方的车道路径离散点;
114、“将所述车道路径离散点相对于所述自动驾驶车辆的纵向距离和朝向角,作为所述车道路径的感知测量结果”的步骤包括:
115、将所述后方的车道路径离散点相对于所述自动驾驶车辆的纵向距离和朝向角,作为所述车道路径的感知测量结果。
116、方案11.根据方案1所述的自动驾驶车辆的环境信息预测方法,其特征在于,在“根据所述状态转换模型,获取当前时刻所述自动驾驶车辆的周围环境中的环境目标的位置关系的预测值”的步骤之前,所述方法还包括:
117、对所述环境目标的感知测量信息进行初始化;
118、基于所述初始化结果,对所述感知测量信息的获取设备的有效性进行判定。
119、方案12.根据方案11所述的自动驾驶车辆的环境信息预测方法,其特征在于,“对所述感知测量信息的获取设备的有效性进行判定”的步骤包括:
120、当所述获取设备为所述自动驾驶车辆的车端感知设备时,根据所述车端感知设备的初始置信度和环境信息,获取所述车端感知设备的综合置信度;
121、根据所述综合置信度,判断所述车端感知设备的有效性;和/或,
122、当所述获取设备为地图匹配系统时,根据所述地图匹配系统中不同地图之间的通信情况以及所述自动驾驶车辆的定位系统是否正常工作以及当前道路是否有高精度地图覆盖来判断所述有效性。
123、方案13.根据方案1所述的自动驾驶车辆的环境信息预测方法,其特征在于,“根据所述自动驾驶车辆获取的当前时刻所述环境目标的位置关系的感知测量结果和所述预测值,基于卡尔曼滤波方程对所述预测值进行更新,获取当前时刻所述环境目标的位置关系的最终预测结果”的步骤之前,所述方法包括:
124、获取所述感知测量结果的置信度;
125、根据所述置信度,选择性地应用所述感知测量结果对所述预测值进行更新,以获取所述最终预测结果。
126、方案14.根据方案1所述的自动驾驶车辆的环境信息预测方法,其特征在于,所述环境目标包括运动目标和静止目标,“根据所述自动驾驶车辆获取的当前时刻所述环境目标的位置关系的感知测量结果和所述预测值,基于卡尔曼滤波方程对所述预测值进行更新,获取当前时刻所述环境目标的位置关系的最终预测结果”的步骤包括:
127、根据所述运动目标的感知测量结果对所述预测值进行更新,获取所述运动目标的更新后的预测值;
128、根据所述运动目标的更新后的预测值和所述静止目标所处位置相对于所述自动驾驶车辆的位置关系,获取所述最终预测结果。
129、方案15.一种自动驾驶车辆的控制方法,其特征在于,所述方法包括:
130、根据方案1至14中任一项所述的自动驾驶车辆的环境信息预测方法,获取所述自动驾驶车辆的周围环境中的环境目标的最终预测结果;
131、根据所述最终预测结果,对所述自动驾驶车辆进行控制。
132、方案16.根据方案15所述的自动驾驶车辆的控制方法,其特征在于,“根据所述最终预测结果,对所述自动驾驶车辆进行控制”的步骤包括:
133、根据所述最终预测结果,对所述环境目标进行编码;
134、根据所述编码结果,对所述自动驾驶车辆进行控制。
135、方案17.根据方案16所述的自动驾驶车辆的控制方法,其特征在于,所述环境目标为所述自动驾驶车辆的周围车辆;“根据所述最终预测结果,对所述环境目标进行编码”的步骤包括:
136、根据所述周围车辆的最终预测结果,获取所述周围车辆的朝向角;
137、根据所述朝向角和预设的夹角阈值,对所述周围车辆进行编码。
138、方案18.一种控制装置,包括至少一个处理器和至少一个存储装置,所述存储装置适于存储多条程序代码,其特征在于,所述程序代码适于由所述处理器加载并运行以执行方案1至14中任一项所述的自动驾驶车辆的环境信息预测方法或方案15至17中任一项所述的自动驾驶车辆的控制方法。
139、方案19.一种计算机可读存储介质,其中存储有多条程序代码,其特征在于,所述程序代码适于由处理器加载并运行以执行方案1至14中任一项所述的自动驾驶车辆的环境信息预测方法或方案15至17中任一项所述的自动驾驶车辆的控制方法。
140、方案20.一种车辆,其特征在于,所述车辆包括方案18所述的控制装置。
- 还没有人留言评论。精彩留言会获得点赞!