踏板模拟器的控制方法、装置、车辆及存储介质与流程
本技术涉及车辆,特别涉及一种踏板模拟器的控制方法、装置、车辆及存储介质。
背景技术:
1、相关技术中,现有踏板模拟器有两种类型,一是采用电磁阀控制开度进行系统刚度控制,实现踏板力进行模拟,适用于湿式制动系统。二是干式模拟器,采用多层弹簧进行模拟。
2、然而,湿式踏板模拟器采用电磁阀控制,需液压系统支持,踏板感可调,无法进行力反馈,增加了硬件成本,又增加了开发成本。此外,emb(electronicmechanical brake,电子机械制动)系统没有液压系统,不具备采用湿式踏板模拟器的条件,只能使用干式模拟器,然而,现有干式螺旋弹簧装置,车型匹配需重新进行,又增加了开发成本,且踏板感不可调,不同工况下无法切换。
技术实现思路
1、有鉴于此,本发明旨在提出一种踏板模拟器的控制方法、装置、车辆及存储介质,该方法解决了干式踏板模拟器的踏板感不可调节,不同工况下无法切换等问题,保证了车辆电子机械制动系统功能的安全性。
2、为达到上述目的,本发明的技术方案是这样实现的:
3、一种踏板模拟器的控制方法,包括:
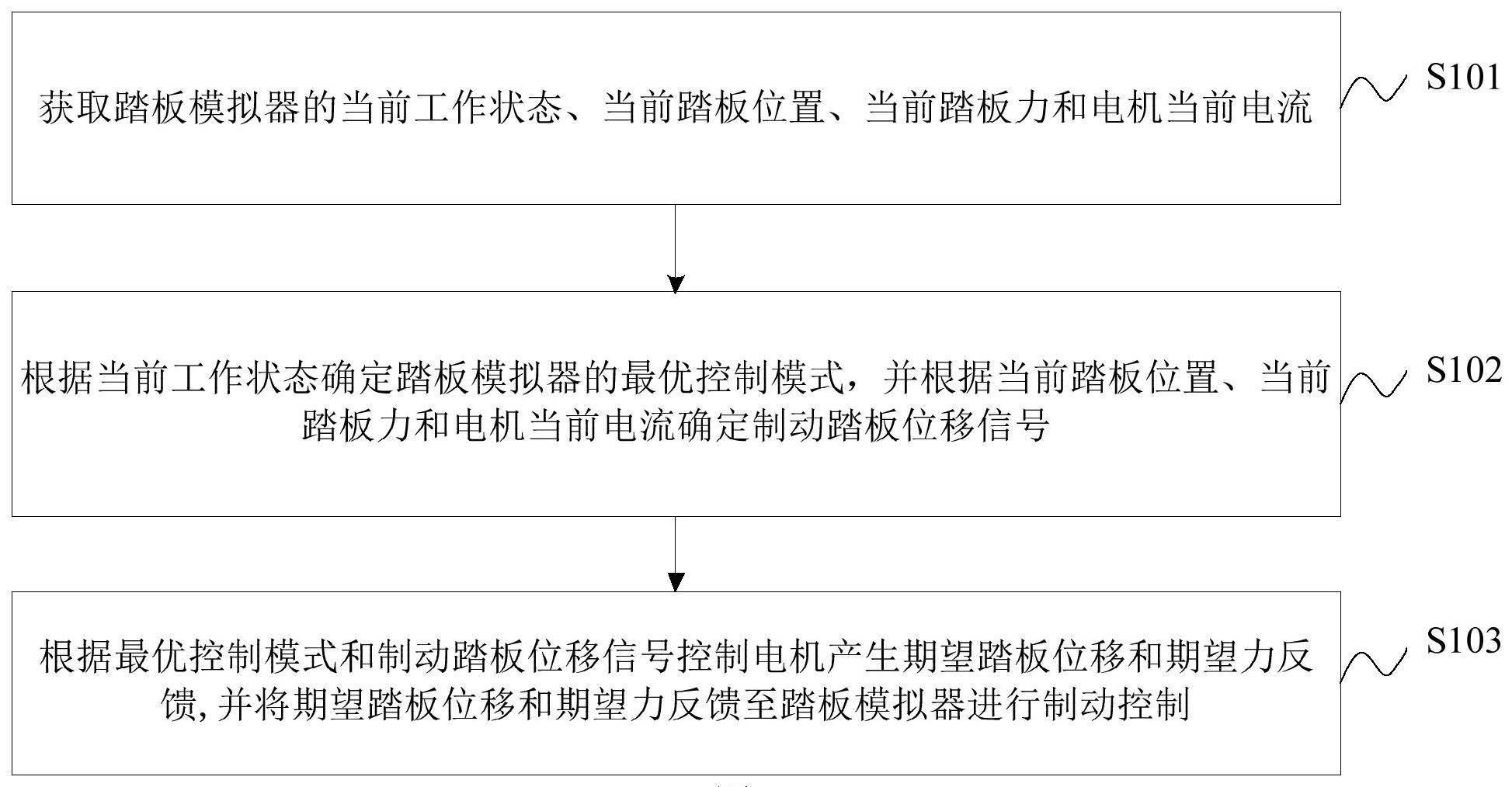
4、获取踏板模拟器的当前工作状态、当前踏板位置、当前踏板力和电机当前电流;
5、根据所述当前工作状态确定所述踏板模拟器的最优控制模式,并根据所述当前踏板位置、所述当前踏板力和所述电机当前电流确定制动踏板位移信号;以及根据所述最优控制模式和所述制动踏板位移信号控制电机产生期望踏板位移和期望力反馈,并将所述期望踏板位移和所述期望力反馈至所述踏板模拟器进行制动控制。
6、进一步地,在一些实施例中,所述根据所述当前工作状态确定所述踏板模拟器的最优控制模式,包括:
7、若所述当前工作状态为预设无故障状态,则所述踏板模拟器的最优控制模式为根据制动系统的当前模式确定所述踏板模拟器的踏板行程和踏板力;
8、若所述当前工作状态为防抱死制动系统abs工况或电子稳定控制系统esc工况,则所述踏板模拟器的最优控制模式为保持踏板位置不变,并在所述踏板模拟器施加与用户需求对应的反弹位移;
9、若所述当前工作状态为预设故障状态,则所述踏板模拟器的最优控制模式为利用所述踏板模拟器单级反馈弹簧,并加大所述踏板模拟器的制动行程,降低所述踏板模拟器的踏板力。
10、进一步地,在一些实施例中,在获取所述踏板模拟器的当前工作状态、当前踏板位置、当前踏板力和电机当前电流之前,还包括:
11、判断当前车辆是否满足预设的主动反馈条件;
12、若所述车辆满足所述预设的主动反馈条件,则获取所述踏板模拟器的当前工作状态、当前踏板位置、当前踏板力和电机当前电流。
13、进一步地,在一些实施例中,所述判断所述车辆是否满足预设的主动反馈条件,包括:
14、判断所述车辆是否接收到制动信号;
15、若接收到所述制动信号,则判定所述车辆满足所述预设的主动反馈条件。
16、进一步地,在一些实施例中,在获取所述踏板模拟器的当前工作状态、当前踏板位置、当前踏板力和电机当前电流之前,还包括:
17、在所述当前工作状态为abs工况或esc工况,或者所述预设故障状态时,生成对应的工况提醒信息;
18、发送所述工况提醒信息至所述车辆的车载显示模块,以通过所述工况提醒信息提醒用户。
19、相对于现有技术,本发明所述的踏板模拟器的控制方法具有以下优势:
20、本发明所述的踏板模拟器的控制方法,通过获取踏板模拟器的当前工作状态、当前踏板位置、当前踏板力和电机当前电流,根据当前工作状态确定踏板模拟器的最优控制模式,并根据当前踏板位置、当前踏板力和电机当前电流确定制动踏板位移信号,根据最优控制模式和制动踏板位移信号控制电机产生期望踏板位移和期望力反馈,并将期望踏板位移和期望力反馈至踏板模拟器进行制动控制。由此,解决了干式踏板模拟器的踏板感不可调节,不同工况下无法切换等问题,保证了车辆电子机械制动系统功能的安全性。
21、本发明的另一个目的在于提出一种踏板模拟器的控制装置,该装置解决了干式踏板模拟器的踏板感不可调节,不同工况下无法切换等问题,保证了车辆电子机械制动系统功能的安全性。
22、为达到上述目的,本发明的技术方案是这样实现的:
23、一种踏板模拟器的控制装置,包括:
24、获取模块,用于获取踏板模拟器的当前工作状态、当前踏板位置、当前踏板力和电机当前电流;
25、确定模块,用于根据所述当前工作状态确定所述踏板模拟器的最优控制模式,并根据所述当前踏板位置、所述当前踏板力和所述电机当前电流确定制动踏板位移信号;以及控制模块,用于根据所述最优控制模式和所述制动踏板位移信号控制电机产生期望踏板位移和期望力反馈,并将所述期望踏板位移和所述期望力反馈至所述踏板模拟器进行制动控制。
26、进一步地,在一些实施例中,所述确定模块,还用于:
27、在所述当前工作状态为预设无故障状态时,所述踏板模拟器的最优控制模式为根据制动系统的当前模式确定所述踏板模拟器的踏板行程和踏板力;
28、在所述当前工作状态为防抱死制动系统abs工况或电子稳定控制系统esc工况时,所述踏板模拟器的最优控制模式为保持踏板位置不变,并在所述踏板模拟器施加与用户需求对应的反弹位移;
29、在所述当前工作状态为预设故障状态时,所述踏板模拟器的最优控制模式为利用所述踏板模拟器单级反馈弹簧,并加大所述踏板模拟器的制动行程,降低所述踏板模拟器的踏板力。
30、进一步地,在一些实施例中,在获取所述踏板模拟器的当前工作状态、当前踏板位置、当前踏板力和电机当前电流之前,所述获取模块,还用于:
31、判断当前车辆是否满足预设的主动反馈条件;
32、若所述车辆满足所述预设的主动反馈条件,则获取所述踏板模拟器的当前工作状态、当前踏板位置、当前踏板力和电机当前电流。
33、进一步地,在一些实施例中,所述获取模块,还用于:
34、判断所述车辆是否接收到制动信号;
35、若接收到所述制动信号,则判定所述车辆满足所述预设的主动反馈条件。
36、进一步地,在一些实施例中,在获取所述踏板模拟器的当前工作状态、当前踏板位置、当前踏板力和电机当前电流之前,所述获取模块,还用于:
37、在所述当前工作状态为abs工况或esc工况,或者所述预设故障状态时,生成对应的工况提醒信息;
38、发送所述工况提醒信息至所述车辆的车载显示模块,以通过所述工况提醒信息提醒用户。
39、所述的踏板模拟器的控制装置与上述的踏板模拟器的控制方法相对于现有技术所具有的优势相同,在此不再赘述。
40、本发明的另一个目的在于提出一种车辆,该车辆解决了干式踏板模拟器的踏板感不可调节,不同工况下无法切换等问题,保证了车辆电子机械制动系统功能的安全性。
41、为达到上述目的,本发明的技术方案是这样实现的:
42、一种车辆,包括:存储器、处理器及存储在所述存储器上并可在所述处理器上运行的计算机程序,所述处理器执行所述程序,以实现如上述实施例所述的踏板模拟器的控制方法。
43、所述的车辆与上述的踏板模拟器的控制方法相对于现有技术所具有的优势相同,在此不再赘述。
44、本发明的另一个目的在于提出一种计算机可读存储介质,该存储介质解决了干式踏板模拟器的踏板感不可调节,不同工况下无法切换等问题,保证了车辆电子机械制动系统功能的安全性。
45、为达到上述目的,本发明的技术方案是这样实现的:
46、一种计算机可读存储介质,其上存储有计算机程序,该程序被处理器执行,以用于实现如上述实施例所述的踏板模拟器的控制方法。
47、所述的计算机可读存储介质与上述的踏板模拟器的控制方法相对于现有技术所具有的优势相同,在此不再赘述。
- 还没有人留言评论。精彩留言会获得点赞!