本技术涉及车载永磁同步电机控制(microcontroller unit,mcu),尤其涉及一种黏着控制方法、装置、电子设备及存储介质。
背景技术:
1、分布式电驱动车辆各驱动轮牵引力可独立分配且互不影响,具有传动链短、动力响应快和能量传递效率高等优点,调节各车轮转矩的分配,可提高车辆的动力性。
2、在电动汽车行驶过程中,汽车车轮与地面之间的粘着力是驱动汽车运行的最终动力。尤其是对于电动越野车而言,需要在多种场景、多种工况下行驶,地面所能提供的最大粘着力受到雨、雪、冰、沙等自然条件的影响,汽车实际发挥粘着力的大小取决于汽车的粘着利用率。良好的粘着利用不仅可以有效地提高电动越野车的加速性能,改善乘车舒适性,而且还能显著地减少车轮的打滑,降低传动系统承载载荷。
3、由于分布式电动越野车的车载电机与车轮近乎刚性连接,且永磁同步电机具有较高精度的位置传感器——旋变,因此如何直接利用永磁同步电机进行黏着控制为目前急需解决的技术问题。
技术实现思路
1、为解决相关技术问题,本技术实施例提供一种黏着控制方法、装置、电子设备及存储介质。
2、本技术实施例的技术方案是这样实现的:
3、本技术实施例提供了一种黏着控制方法,应用于新能源分布式驱动的车辆,包括:
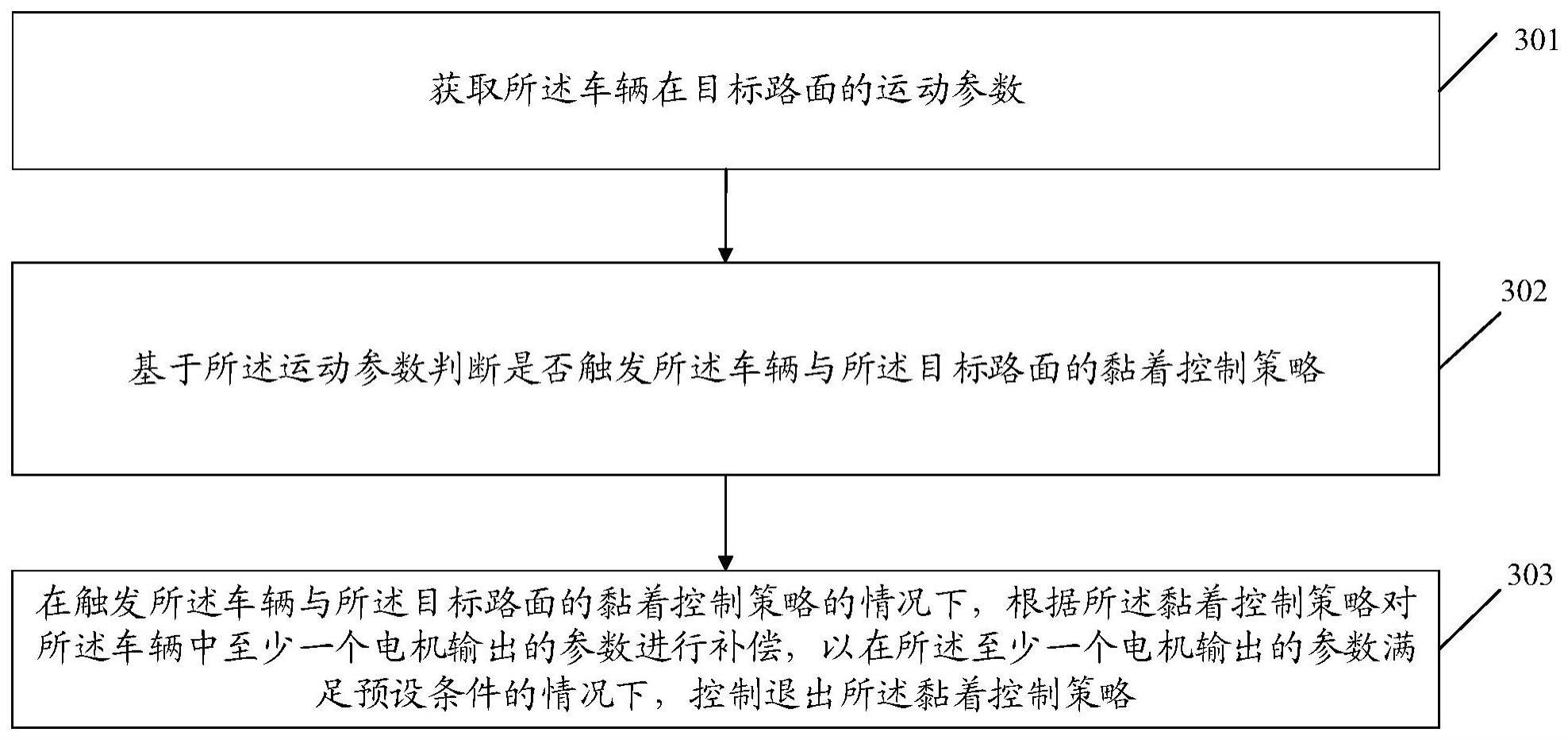
4、获取所述车辆在目标路面的运动参数;
5、基于所述运动参数判断是否触发所述车辆与所述目标路面的黏着控制策略;
6、在触发所述车辆与所述目标路面的黏着控制策略的情况下,根据所述黏着控制策略对所述车辆中至少一个电机输出的参数进行补偿,以在所述至少一个电机输出的参数满足预设条件的情况下,控制退出所述黏着控制策略。
7、上述方案中,所述运动参数包括所述至少一个电机的角加速度;所述基于所述运动参数判断是否触发所述车辆与所述目标路面的黏着控制策略,包括:
8、判断所述角加速度的值是否大于第一检测阈值;
9、在所述角加速度的值大于所述第一检测阈值的情况下,确定触发所述车辆与所述目标路面的黏着控制策略;
10、在所述角加速度的值小于或等于所述第一检测阈值的情况下,确定不触发所述车辆与所述目标路面的黏着控制策略。
11、上述方案中,在所述角加速度的值大于所述检测阈值的情况下;所述方法还包括:
12、检测所述车辆中至少一个电机的转速;
13、判断所述转速的值是否小于或等于预设阈值;
14、在所述转速的值小于或等于所述预设阈值的情况下,确定不触发所述车辆与所述目标路面的黏着控制策略。
15、上述方案中,在所述角加速度大于所述检测阈值的情况下;所述方法还包括:
16、检测所述车辆中至少一个电机的工作状态是否发生变化;
17、在所述车辆中至少一个电机的工作状态发生变化的情况下,确定不触发所述车辆与所述目标路面的黏着控制策略。
18、上述方案中,所述参数包括扭矩和/或电流;所述根据所述黏着控制策略对所述车辆中至少一个电机输出的参数进行补偿,包括:
19、获取包括所述扭矩和/或电流对应的比例系数的黏着控制策略;
20、根据所述黏着控制策略控制所述车辆中至少一个电机按照所述比例系数输出对应的扭矩和/或电流。
21、上述方案中,所述参数包括反向角加速度,所述方法还包括:
22、检测所述至少一个电机输出的反向角加速度;
23、判断所述反向加速度的值是否大于或等于第二检测阈值;所述第二检测阈值小于所述第一检测阈值;所述第一检测阈值与所述第二检测阈值的方向相反;
24、在所述反向加速度的值大于或等于所述第二检测阈值的情况下,控制退出所述黏着控制策略。
25、上述方案中,在所述反向加速度的值大于或等于所述第二检测阈值的情况下,所述方法还包括:
26、获取限制所述电机扭矩和/或电流的比例因子;
27、基于所述比例因子,控制退出所述黏着控制策略。
28、上述方案中,所述参数包括反向角加速度,所述方法还包括:
29、检测所述至少一个电机输出的反向角加速度;
30、判断所述反向加速度的值是否小于第二检测阈值;所述第二检测阈值小于所述第一检测阈值;所述第一检测阈值与所述第二检测阈值的方向相同;
31、在所述反向加速度的值小于所述第二检测阈值的情况下,控制退出所述黏着控制策略。
32、上述方案中,在所述第二检测阈值小于所述第一检测阈值的情况下,所述方法还包括:
33、获取由所述第一检测阈值和所述第二检测阈值包围的目标区域;
34、检测所述至少一个电机输出的角加速度;
35、判断所述角加速度所在的区域是否属于所述目标区域;
36、在所述角加速度所在的区域属于所述目标区域的情况下,获取所述角加速度所在的区域属于所述目标区域的时间长度;
37、在所述时间长度大于预设时长的情况下,控制退出所述黏着控制策略。
38、上述方案中,所述控制退出所述黏着控制策略包括以下至少之一:
39、通过将所述电机由限制扭矩和/或电流的状态切换到不限制扭矩和/或电流的状态;
40、通过逐步减小所述电机扭矩和/或电流的比例。
41、本技术实施例还提供了一种黏着控制装置,包括:
42、获取单元,用于获取所述车辆在目标路面的运动参数;
43、判断单元,用于基于所述运动参数判断是否触发所述车辆与所述目标路面的黏着控制策略;
44、控制单元,用于在触发所述车辆与所述目标路面的黏着控制策略的情况下,根据所述黏着控制策略对所述车辆中至少一个电机输出的参数进行补偿,以在所述至少一个电机输出的参数满足预设条件的情况下,控制退出所述黏着控制策略。
45、本技术实施例还提供了一种电子设备,包括:
46、存储器,用于存储可执行指令;
47、处理器,用于执行所述存储器中存储的可执行指令时,实现上述所述方法的任一步骤。
48、本技术实施例还提供一种计算机可读存储介质,存储有可执行指令,用于被处理器执行时,实现上述所述方法的任一步骤。
49、本技术实施例提供的黏着控制方法、装置、电子设备及存储介质,其中,方法应用于新能源分布式驱动的车辆,包括:获取所述车辆在目标路面的运动参数;基于所述运动参数判断是否触发所述车辆与所述目标路面的黏着控制策略;在触发所述车辆与所述目标路面的黏着控制策略的情况下,根据所述黏着控制策略对所述车辆中至少一个电机输出的参数进行补偿,以在所述至少一个电机输出的参数满足预设条件的情况下,控制退出所述黏着控制策略,本技术实施例的方案,通过车辆在目标路面的运动参数判断是否触发所述车辆与所述目标路面的黏着控制策略;在触发所述车辆与所述目标路面的黏着控制策略的情况下,根据所述黏着控制策略对所述车辆中至少一个电机输出的参数进行补偿,以在所述至少一个电机输出的参数满足预设条件的情况下,控制退出所述黏着控制策略;从而对目标路面(例如,多种场景、多种工况)触发所述车辆与所述目标路面的黏着控制策略的情况下,根据所述黏着控制策略对所述车辆中至少一个电机输出的参数进行补偿,保证车辆可在多种场景、多种工况下每个轮子均需充分利用地面的附着系数驱动车辆,从而提高车辆的驾驶舒适性和动力经济性。