半挂汽车列车倒车控制方法及控制器、系统、半挂汽车与流程
本技术涉及车辆控制,具体涉及半挂汽车列车倒车控制方法及控制器、系统、半挂汽车。
背景技术:
1、随着人工智能和自动驾驶技术的不断成熟,在干线物流、港口、矿山、园区等场景下的商用车自动驾驶应用范围不断扩大。半挂汽车列车因为载重量大、运输效率高、成本低以及节油效果好等原因,已经成为物流货物运输的主力;在港口封闭场景中半挂集装箱卡车更是不二之选。在港口和园区的应用场景中,半挂汽车列车需要在较低车速情况下高精度地自动跟踪参考路径,实现精准地倒车入位。
2、半挂汽车列车系统由牵引车和挂车组成,二者之间通过牵引鞍座和牵引销实现连接。半挂汽车列车在前向行驶时的动力学状态是开环稳定地,但是在倒车时,即使在低速情况下,运动学模型仍然具有非线性、不稳定和不确定的特点。倒车时的运动学和动力学状态是开环不稳定的,容易发生碰撞、折叠等现象,从而难以实现高精度、跟踪预定轨迹实现倒车入位。
技术实现思路
1、有鉴于此,本技术提供了半挂汽车列车倒车控制方法及控制器、系统、半挂汽车,解决了现有技术中半挂汽车列车在倒车过程中难以实现高精度、跟踪预定轨迹实现倒车入位。
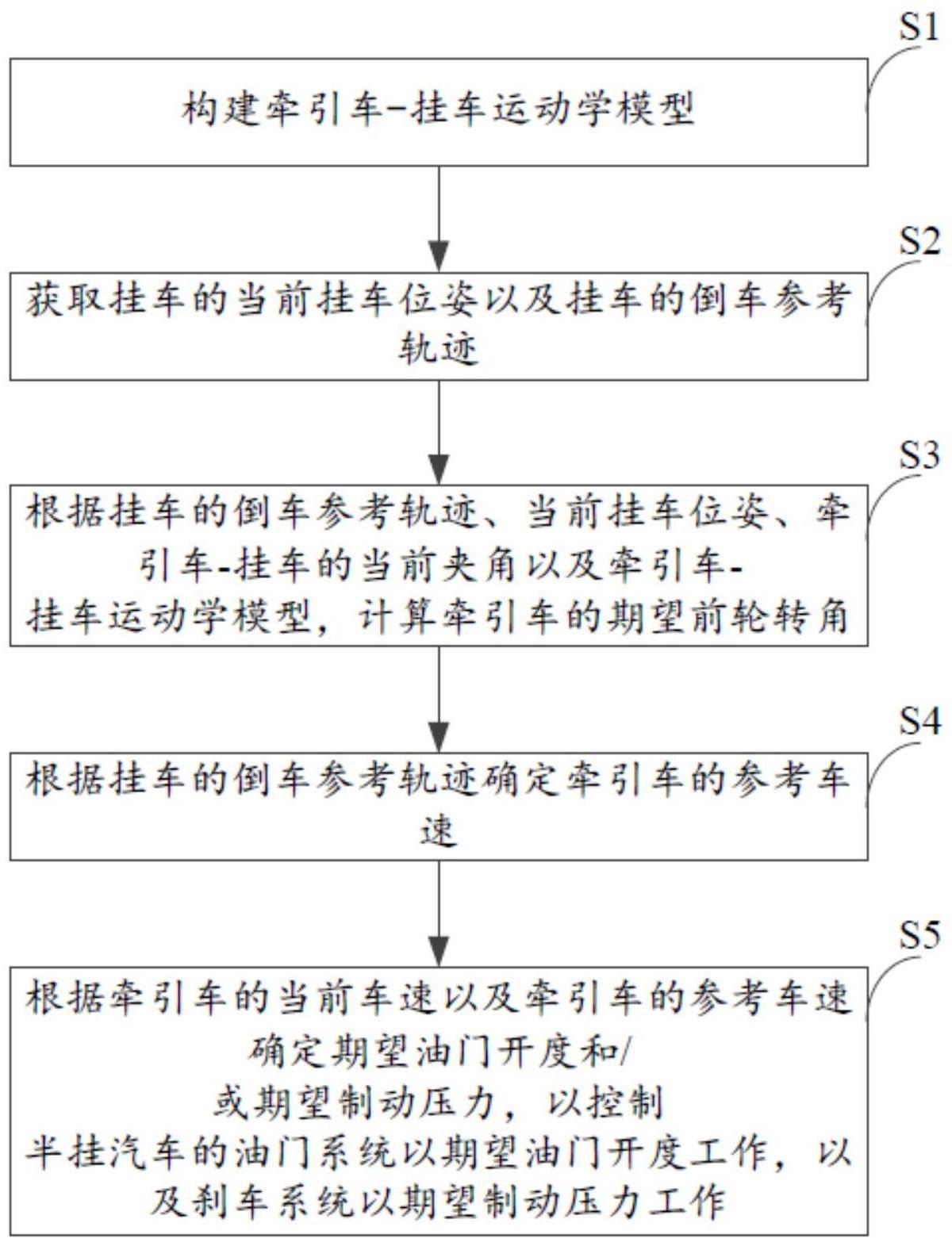
2、作为本技术的第一方面,本技术提供了一种半挂汽车列车倒车控制方法,包括:构建半挂汽车列车的牵引车-挂车运动学模型,其中,所述牵引车-半挂车运动学模型至少包括所述半挂汽车列车的几何参数;获取挂车的当前挂车位姿以及所述挂车的倒车参考轨迹;根据所述挂车的所述倒车参考轨迹、所述当前挂车位姿、所述牵引车-挂车的当前夹角以及牵引车-挂车运动学模型,计算牵引车的期望前轮转角,以控制所述牵引车的前轮以所述期望前轮转角转动;根据所述挂车的倒车参考轨迹确定所述牵引车的参考车速;获取所述牵引车的当前车速,并根据所述牵引车的当前车速以及所述牵引车的参考车速确定期望油门开度和/或期望制动压力,以控制所述半挂汽车的油门系统以所述期望油门开度工作,以及刹车系统以所述期望制动压力工作。
3、本技术的半挂汽车列车倒车控制方法,基于倒车参考轨迹以及挂车位姿计算牵引车的期望前轮转角,以控制所述牵引车的前轮以所述期望前轮转角转动,从而可以控制牵引车-挂车夹角与期望的牵引车-挂车夹角一致,实现倒车过程中的路径跟踪;与此同时,根据牵引车的车速以及牵引车的参考车速确定期望油门开度和/或期望制动压力,以控制所述半挂汽车的油门系统以所述期望油门开度工作,以及刹车系统以所述期望制动压力工作,从而可以控制牵引车在倒车时的实际车速与参考车速保持一致,从而实现速度跟踪,即本技术提供的半挂汽车列车倒车控制方法基于倒车参考轨迹,分别以速度以及路径两个路径协同作用,实现对倒车参考轨迹的跟踪,提高了倒车过程中对参考轨迹的跟踪精确度,从而提高了半挂汽车列车的倒车稳定性;另外半挂列车工作在需要不同倒车速度的应用场景时,均可以基于倒车参考轨迹实现精准倒车入位。
4、在本技术一实施例中,所述根据所述挂车的所述倒车参考轨迹、所述当前挂车位姿、所述牵引车-挂车的当前夹角以及牵引车-挂车运动学模型,计算牵引车的期望前轮转角,包括:根据所述倒车参考轨迹以及所述当前挂车位姿,计算半挂汽车列车对应的牵引车-挂车的期望夹角;基于所述牵引车-挂车运动学模型,根据所述牵引车-挂车的当前夹角以及所述牵引车-挂车的期望夹角,计算所述牵引车的期望前轮夹角。
5、在本技术一实施例中,所述根据所述倒车参考轨迹以及所述当前挂车位姿,计算半挂汽车列车对应的牵引车-挂车的期望夹角,包括:获取牵引车后轴中心与牵引车-挂车铰接点的纵向距离以及牵引车-挂车铰接点与挂车后轴中心的纵向距离;根据所述倒车参考轨迹以及所述当前挂车位姿,计算挂车后轴中心与投影点的法向距离以及挂车的航向角和投影点航向角的差值,其中所述投影点为所述倒车参考轨迹上与挂车后轴中心之间的直线距离最短的轨迹点;根据所述挂车后轴中心与所述投影点的法向距离、挂车的航向角和投影点航向角的差值、所述投影点的曲率、牵引车后轴中心与牵引车-挂车铰接点的纵向距离以及牵引车-挂车铰接点与挂车后轴中心的纵向距离计算半挂汽车列车对应的牵引车-挂车的期望夹角。可通过计算横向误差以及航向误差,并根据横向误差以及航向误差计算期望牵引车-挂车夹角。
6、在本技术一实施例中,在所述根据所述挂车后轴中心与所述投影点的法向距离、挂车的航向角和投影点航向角的差值、所述投影点的曲率、牵引车后轴中心与牵引车-挂车铰接点的纵向距离以及牵引车-挂车铰接点与挂车后轴中心的纵向距离计算半挂汽车列车对应的牵引车-挂车的期望夹角之后,所述根据所述倒车参考轨迹以及所述当前挂车位姿,计算半挂汽车列车对应的牵引车-挂车的期望夹角还包括:根据所述挂车的倒车参考轨迹确定所述倒车参考轨迹的曲率;根据所述倒车参考轨迹的曲率,对所述牵引车-挂车的期望夹角进行补偿,以确定牵引车-挂车的补偿后的期望夹角;其中,所述基于所述牵引车-挂车运动学模型,根据所述牵引车-挂车的当前夹角以及所述牵引车-挂车的期望夹角,计算所述牵引车的期望前轮夹角,包括:获取所述牵引车-挂车的补偿后的期望夹角,并基于所述牵引车-挂车运动学模型,根据所述牵引车-挂车的当前夹角以及所述牵引车-挂车的补偿后的期望夹角,计算所述牵引车的期望前轮夹角。在计算牵引车-挂车的期望夹角ψ*时,根据系统前馈向量(参考倒车轨迹中的投影点的投影点曲率)对期望牵引车-挂车夹角进行补偿,保证牵引车-挂车系统更好的跟踪曲线倒车轨迹,以达到满足不同参考倒车轨迹的需求。
7、在本技术一实施例中,所述获取所述牵引车的当前车速,并根据所述牵引车的当前车速以及所述牵引车的参考车速确定期望油门开度和/或期望制动压力,包括:获取所述牵引车的当前车速,并根据所述牵引车的当前车速以及所述牵引车的参考车速确定所述牵引车的期望加速度;根据预设标定表、所述牵引车的期望加速度以及所述牵引车的当前车速,计算所述期望油门开度和/或期望制动压力。当确定期望油门开度和/或期望制动压力,以控制半挂汽车的油门系统以期望油门开度工作,以及刹车系统以期望制动压力工作,以使得牵引车的当前车速与参考车速保持一致,从而实现速度跟踪。
8、在本技术一实施例中,在所述获取所述牵引车的当前车速,并根据所述牵引车的当前车速以及所述牵引车的参考车速确定所述牵引车的期望加速度和所述根据预设标定表、所述牵引车的期望加速度以及所述牵引车的当前车速,计算所述期望油门开度和/或期望制动压力之间,所述获取所述牵引车的当前车速,并根据所述牵引车的当前车速以及所述牵引车的参考车速确定期望油门开度和/或期望制动压力还包括:获取所述牵引车行驶的道路的当前坡度,并根据所述当前坡度对所述牵引车的期望加速度进行补偿,以确定经过补偿后的牵引车的期望加速度;其中,所述根据预设标定表、所述牵引车的期望加速度以及所述牵引车的当前车速,计算所述期望油门开度和/或期望制动压力,包括:根据预设标定表、经过补偿后的牵引车的期望加速度以及所述牵引车的当前车速,计算所述期望油门开度和/或期望制动压力。通过加入倒车过程中道路的坡度来补偿牵引车的期望加速度,可以完成不同坡度下的速度跟踪,进一步基于倒车参考轨迹实现精准倒车入位。
9、在本技术一实施例中,所述半挂汽车列车的几何参数包括:牵引车轴距、牵引车后轴中心与牵引车-挂车铰接点的纵向距离、牵引车-挂车铰接点与挂车后轴中心的纵向距离。考虑了牵引车后轴中心与牵引车-挂车铰接点的纵向距离这一导致系统非线性的重要因素,因此,降低了倒车时的系统误差,提高了倒车时的系统稳定性,从而提高了倒车过程中轨迹跟随效果。
10、作为本技术的第二方面,本技术还提供了一种半挂汽车列车倒车控制器,包括:模型构建模块,用于构建半挂汽车列车的牵引车-挂车运动学模型;数据获取模块,用于获取挂车的当前挂车位姿、牵引车-挂车的当前夹角、所述牵引车的当前车速、当前坡度以及倒车参考轨迹;横向控制器,用于根据所述挂车的倒车参考轨迹、、所述当前挂车位姿、所述牵引车-挂车的当前夹角以及牵引车-挂车运动学模型,计算牵引车的期望前轮转角,以控制所述牵引车的前轮以所述期望前轮转角转动;纵向控制器,用于根据所述牵引车的当前车速以及所述牵引车的参考车速确定期望油门开度和/或期望制动压力,以控制所述半挂汽车的油门系统以所述期望油门开度工作,以及刹车系统以所述期望制动压力工作。
11、作为本技术的第二方面,本技术还提供了一种半挂汽车列车控制系统,包括:上述所述的半挂汽车列车倒车控制器;前轮转动驱动系统,用于驱动所述牵引车的前轮以所述期望前轮转角转动;油门系统,用于执行所述期望油门开度;和/或刹车系统,用于执行所述期望制动压力;其中,所述半挂汽车列车倒车控制器分别与所述前轮转动驱动系统、所述油门系统以及所述刹车系统通信连接。
12、作为本技术的第三方面,本技术还提供了一种半挂汽车列车,包括上述所述的半挂汽车列车控制系统。
- 还没有人留言评论。精彩留言会获得点赞!