通过制动转向或通过扭矩转向向量化过程中的路径规划的制作方法
本公开涉及为车辆的至少一个驾驶员支持系统和/或为车辆的至少一个驾驶辅助系统提供控制数据的计算机实施的方法、为车辆的至少一个驾驶员支持系统和/或驾驶辅助系统提供控制数据的系统、对应的计算机程序元件以及包括这种系统的车辆。
背景技术:
1、在现有技术中,在车辆的转向致动器故障(其中车辆有不能再转向的风险)的情况下,摩擦制动或扭矩向量化可以作为备用被应用于车辆。摩擦制动或扭矩向量化可在车轮悬架中产生力并使前轮转弯。因此,制动和扭矩向量化可被认为是冗余转向致动器。然而,当应用制动或扭矩向量化时,由于有限的致动器能力以及车辆稳定性约束,转向能力可能降低,如果出现速度和曲率的不良组合可能有导致道路偏离的风险。此外,在车载电动助力转向辅助系统(epas)的故障情况下,驾驶员必须向方向盘施加更多的扭矩,其可能被施加得太晚或不够。而且,在使用线控转向技术的情况下,无法发现用于自主驾驶模式的后退系统,在线控转向技术中在方向盘与道路车轮之间不存在机械连接(即转向柱),因此如果线控转向失败,则必须通过车载的其它可用致动器来替代地实施转向。
2、鉴于此,发现存在需要至少针对上述情况为车辆的至少一个驾驶员支持系统和/或为车辆的至少一个驾驶辅助系统提供控制数据的方法。
技术实现思路
1、鉴于上述情况,本公开的目的是提供为车辆的至少一个驾驶员支持系统提供控制数据的计算机实施的方法。
2、通过阅读以下描述将变得显而易见的这些和其它目的通过独立权利要求的主题来解决。从属权利要求涉及本公开的优选示例。
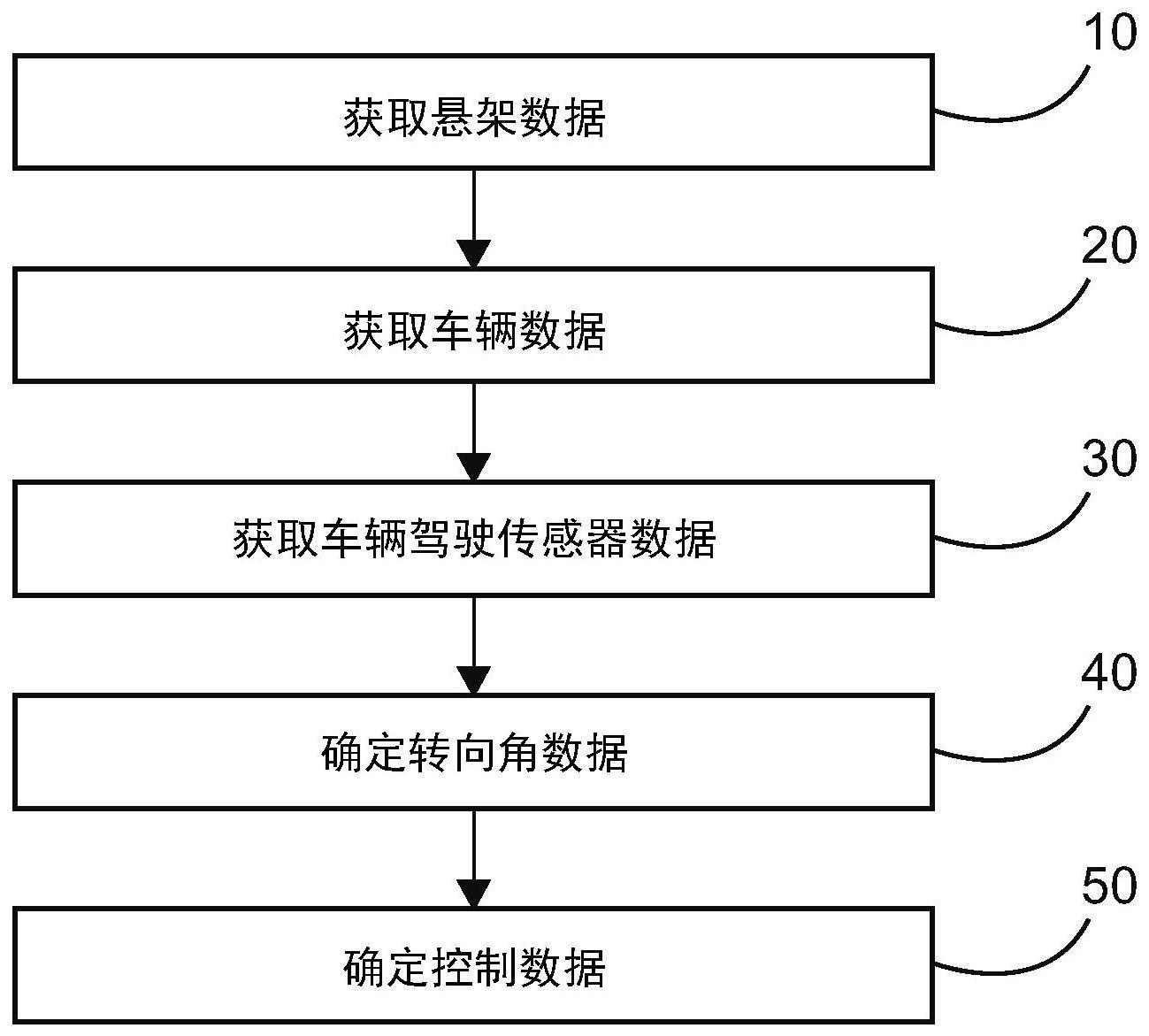
3、本公开的第一方面涉及为车辆的至少一个驾驶员支持系统和/或为车辆的至少一个驾驶辅助系统提供控制数据的计算机实施的方法,该控制数据用于通过曲率规划和转向来支持车辆在期望路径上的驾驶,该方法包括:
4、获取车辆的悬架数据;
5、获取车辆的车辆数据;
6、获取车辆的车辆驾驶传感器数据;
7、基于悬架数据、车辆数据和车辆驾驶传感器数据来确定转向角数据;以及
8、基于转向角数据以及曲率车辆模型来确定用于至少一个驾驶员支持系统和/或驾驶支持系统的控制数据。
9、换句话说,本公开提供曲率能力,尤其是对于自驾驶车辆,以遵循车辆前方的期望路径以及期望的车速曲线。计算机实施的方法能够计算前方的最大速度,使得车辆能够遵循期望的路径,并且如果发生高曲率,也如此。与最大速度有关的信息可以用于规划运动,并且该信息可以用于早期规划车速,并且由于在发生转向系统故障的情况下使用单独的制动或扭矩向量化,所以能够围绕弯道驾驶。因此,路线和速度曲线的选择可以被确定为能够处理转向故障。转向角数据可以由车辆的至少一个驾驶员支持系统、至少一个驾驶辅助系统和/或传感器或传感器系统获取。此外,转向角数据可以包括车辆的差动扭矩数据,其可以包括车辆的其实际轨迹和/或速度的信息。曲率车辆模型可以包括稳态车辆模型。此外,控制数据可以包括关于车辆的差动扭矩数据和曲率车辆模型的重新规划车辆路径的信息。
10、值得注意的是,本文描述的任何公开内容和实施方式涉及上文或下文列出的方法和装置/单元/设备,反之亦然。由任何方面、实施方式和示例提供的益处同样适用于所有其它方面、实施方式和示例,反之亦然。
11、如本文中使用的,“确定”也包括“发起或促使确定”,“生成”也包括“发起和/或促使生成”并且“提供”也包括“发起或促使确定、生成、选择、发送和/或接收”。“发起或促使执行动作”包括触发计算节点或设备执行相应动作的任何处理信号。
12、在一种实施方式中,该方法可以包括通过曲率确定期望路径的最大速度数据,在该最大速度数据处,特别是在转向系统故障期间,车辆可遵循通过曲率的期望路径。控制数据可以包括通过曲率的期望路径的最大速度数据,在该最大速度数据处,车辆可遵循通过曲率的期望路径。此外,可以关于通过高曲率的可行性来确定最大速度数据。
13、在一个实施方式中,悬架数据可以包括车辆的至少一个车轮的车轮刮擦半径数据(r_scrub)、车辆的至少一个车轮的车轮扭矩数据(difftq)和/或车辆的至少一个轴(特别是前轴)的转弯刚度数据(cornrgstfnfrnt)。
14、在一个实施方式中,车辆数据可以包括车辆的至少一个车轮的车轮数据(whlrd)、车辆的主销后倾拖距数据(r_caster)和/或车辆的重心数据(lf)。
15、在一个实施方式中,车辆驾驶传感器数据可以包括车辆的车速数据(vx)、车辆的偏航率数据(yawrate)和/或车辆的车辆转向比数据(steerratio)。
16、在一个实施方式中,控制数据可以包括通过扭矩转向向量化值以使用通过扭矩转向向量化方法来使车辆转向,和/或控制数据可以包括通过制动转向向量化值以使用通过制动转向向量化方法来使车辆转向。通过扭矩转向向量化方法可以用于控制车辆的至少一个车轮。通过制动转向向量化方法可以用于控制车辆的至少一个车轮。
17、在一个实施方式中,转向角数据的确定可以由车辆的差动扭矩得到,其可以基于以下公式:
18、
19、其中:
20、rscrub是车轮刮擦半径数据;
21、difftq是车轮扭矩数据;
22、cornrgstfnfrnt是转弯刚度数据;
23、whlrd是车轮数据;
24、rcaster是主销后倾拖距数据;
25、lf是重心数据;
26、vx是车速数据;
27、yawrate是偏航速率数据;和/或
28、steeratio是车辆转向比数据。
29、在一个实施方式中,控制数据的确定可以基于包括车辆的转向不足梯度数据(ku)、车辆的轴距数据(l)和车辆的道路车轮角数据(rwa)的稳态车辆模型,并且可以基于以下公式:
30、
31、其中:
32、rwa是道路车轮角数据;
33、l是轴距数据;
34、ku是转向不足梯度数据;和/或
35、vx是车速数据。
36、在一个实施方式中,该方法可以包括确定车辆的系统转向故障数据,其可以基于至少一个驾驶员支持系统和/或驾驶辅助系统;并且控制数据可以包括车辆的故障数据;
37、如果该至少一个驾驶员支持系统和/或驾驶辅助系统正在以故障方式运行,
38、则故障数据可以包括故障值;
39、否则故障数据可以包括无故障值。
40、驾驶员支持系统和/或驾驶辅助系统可以包括控制车辆的转向的系统。此外,驾驶员支持系统和/或驾驶辅助系统可以包括可以负责车辆的行驶的系统。
41、在一个实施方式中,控制数据可以用于基于故障数据控制车辆的至少一个驾驶员支持系统和/或车辆的至少一个驾驶辅助系统,特别是在故障数据包括故障值的情况下。控制数据可以用于控制车速。此外,控制数据可以用于控制车辆的制动。此外,控制数据可以用于控制到车辆的至少一个车轮的动力传输。
42、在一个实施方式中,该方法可以包括确定车辆的期望路径的通过,其中确定可以基于车辆的期望路径的高/低曲率以及转向角数据和/或控制数据。
43、本公开的进一步的方面涉及为车辆的至少一个驾驶员支持系统和/或驾驶辅助系统提供控制数据的系统,该控制数据用于通过曲率规划和转向来支持车辆在期望路径上的驾驶,该系统包括:
44、第一获取单元,用于获取车辆的悬架数据;
45、第二获取单元,用于获取车辆的车辆数据;
46、第三获取单元,用于获取车辆的车辆驾驶传感器数据;
47、第一确定单元,用于基于悬架数据、车辆数据和车辆驾驶传感器数据来确定转向角数据;以及
48、第二确定单元,用于基于转向角数据以及曲率车辆模型来确定用于至少一个驾驶员支持系统和/或驾驶支持系统的控制数据。
49、该系统可以被耦合和/或被设置成与车辆的至少一个控制单元交互。该系统可以被耦合和/或被设置成接收至少一个驾驶员支持系统和/或驾驶辅助系统的故障值。
50、在一个实施方式中,该系统可以包括数据提供单元,用于为车辆的至少一个驾驶员支持系统和/或驾驶辅助系统提供控制数据,该车辆基于控制数据而被控制。
51、本公开的进一步的方面涉及具有指令的计算机程序元件,当在计算环境的计算设备上执行时,该指令被配置为在如上所述的系统中执行如上所述的方法的步骤。
52、本公开的进一步的方面涉及包括如上所述的系统的车辆,其中该系统被实施并被配置为运行如上所述的计算机程序元件,并且该计算机程序元件被配置为执行如上所述的方法的步骤,其中该车辆被配置为使用通过扭矩转向向量化方法和/或通过制动转向向量化方法。
- 还没有人留言评论。精彩留言会获得点赞!