车辆控制方法、装置、存储介质和车辆与流程
本技术涉及车辆,特别是涉及一种车辆控制方法、装置、存储介质和车辆。
背景技术:
1、现有的电动车或者混合动力汽车通常配置有四驱模式,在四驱模式下,车辆采用双轴驱动,并通过整车控制器来调节前轴和后轴的驱动扭矩。
2、然而,现有的车辆控制方法中在一些特殊工况下,如车辆在转向的过程中出现打滑现象时,无法快速有效地根据打滑情况对前轴和后轴输出扭矩进行调节,同时缺乏有效地制动手段,使得车辆的转向操控稳定性与安全性较差,影响驾驶员的驾驶体验。
技术实现思路
1、本技术提供一种车辆控制方法、装置、存储介质和车辆,以解决相关技术无法快速有效地根据打滑情况对前轴和后轴输出扭矩进行调节,同时缺乏有效地制动手段,使得车辆的转向操控稳定性与安全性较差的问题。
2、为了解决上述问题,本技术采用了以下的技术方案:
3、第一方面,本技术实施例提供了一种车辆控制方法,所述方法包括:
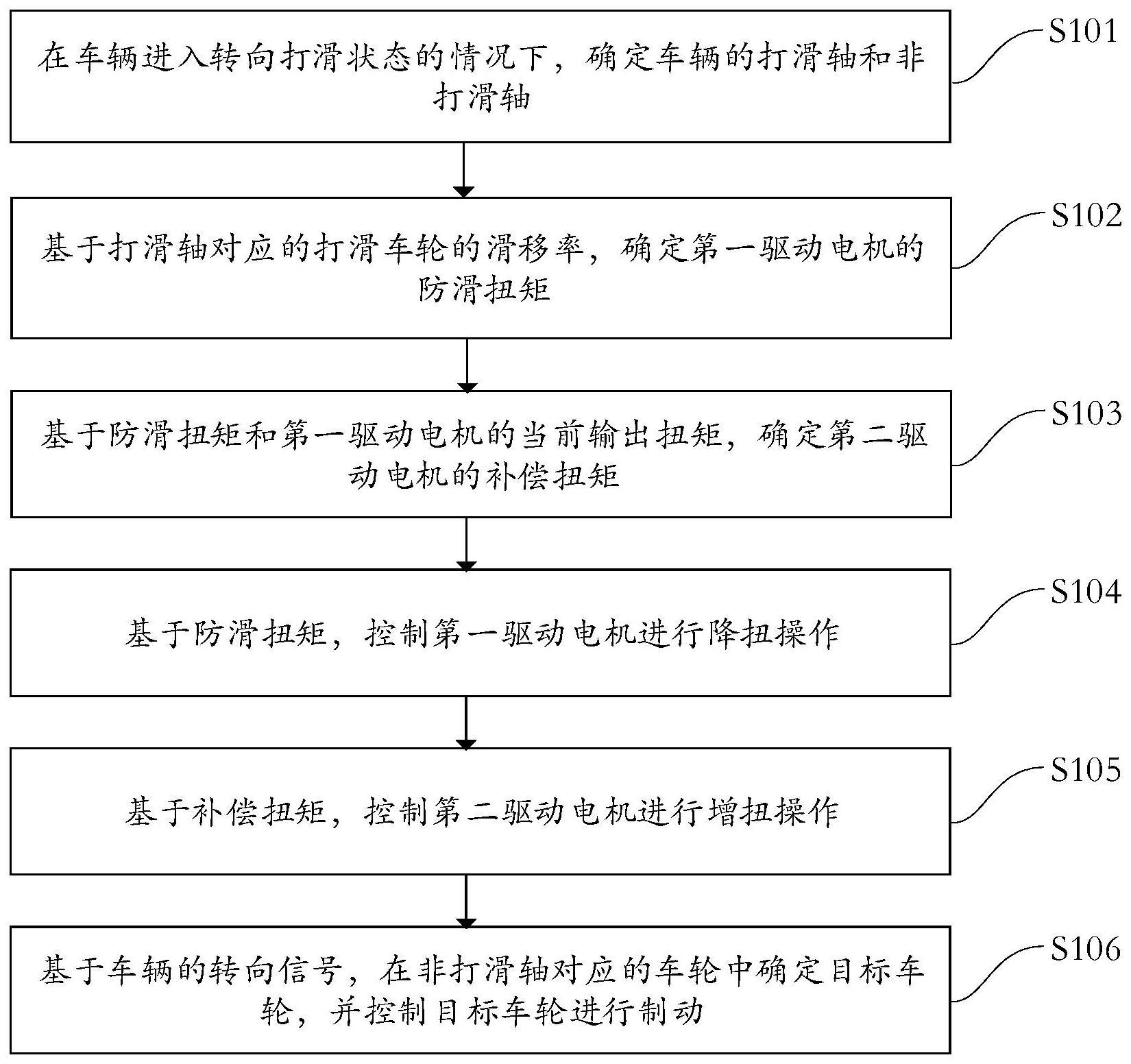
4、在车辆进入转向打滑状态的情况下,确定所述车辆的打滑轴和非打滑轴;
5、基于所述打滑轴对应的打滑车轮的滑移率,确定第一驱动电机的防滑扭矩;所述第一驱动电机用于驱动所述打滑轴;
6、基于所述防滑扭矩和所述第一驱动电机的当前输出扭矩,确定第二驱动电机的补偿扭矩;所述第二驱动电机用于驱动所述非打滑轴;
7、基于所述防滑扭矩,控制所述第一驱动电机进行降扭操作;
8、基于所述补偿扭矩,控制所述第二驱动电机进行增扭操作;
9、基于所述车辆的转向信号,在所述非打滑轴对应的车轮中确定目标车轮,并控制所述目标车轮进行制动。
10、在本技术一实施例中,在车辆进入转向打滑状态的情况下,确定所述车辆的打滑轴和非打滑轴的步骤之前,所述方法还包括:
11、获取所述车辆的各个车轮的滑移率和方向盘转角值;
12、在检测到任一车轮的滑移率大于滑移率阈值且所述方向盘转角值大于转角阈值的情况下,确定所述车辆进入所述转向打滑状态。
13、在本技术一实施例中,确定所述车辆的打滑轴和非打滑轴的步骤,包括:
14、基于所述各个车轮的滑移率,确定前轴车轮的平均滑移率和后轴车轮的平均滑移率;
15、在所述前轴车轮的平均滑移率小于所述后轴车轮的平均滑移率的情况下,确定所述前轴为所述非打滑轴,所述后轴为所述打滑轴;或者,
16、在所述前轴车轮的平均滑移率大于或者等于所述后轴车轮的平均滑移率的情况下,确定所述前轴为所述打滑轴,所述后轴为所述非打滑轴。
17、在本技术一实施例中,基于所述打滑轴对应的打滑车轮的滑移率,确定第一驱动电机的防滑扭矩的步骤,包括:
18、基于所述打滑车轮的滑移率,确定所述打滑车轮所在路面的附着系数;
19、基于所述附着系数,确定所述防滑扭矩。
20、在本技术一实施例中,基于所述防滑扭矩,控制所述第一驱动电机进行降扭操作的步骤,包括:
21、基于所述防滑扭矩,控制所述第一驱动电机进行降扭操作,以使所述第一驱动电机的输出扭矩降低至所述防滑扭矩。
22、在本技术一实施例中,基于所述补偿扭矩,控制所述第二驱动电机进行增扭操作的步骤,包括:
23、基于所述补偿扭矩和所述第二驱动电机的当前输出扭矩,确定所述第二驱动电机的目标扭矩;
24、基于所述目标扭矩,控制第二驱动电机进行增扭操作,以使所述第二驱动电机的输出扭矩增加至所述目标扭矩。
25、在本技术一实施例中,所述方法还包括:
26、在所述非打滑轴连接有发动机且所述目标扭矩大于所述第二驱动电机的可持续输出扭矩的情况下,基于所述目标扭矩和所述可持续输出扭矩,确定发动机补偿扭矩;
27、控制所述发动机按照所述发动机补偿扭矩进行输出。
28、在本技术一实施例中,基于所述车辆的转向信号,在所述非打滑轴对应的车轮中确定目标车轮的步骤,包括:
29、在所述转向信号表征左转且非打滑轴为前轴的情况下,将所述前轴中远离弯道一侧的车轮确定为所述目标车轮;或者,
30、在所述转向信号表征左转且非打滑轴为后轴的情况下,将所述后轴中靠近弯道一侧的车轮确定为所述目标车轮;或者,
31、在所述转向信号表征右转且非打滑轴为前轴的情况下,将所述前轴中远离弯道一侧的车轮确定为所述目标车轮;或者,
32、在所述转向信号表征右转且非打滑轴为后轴的情况下,将所述后轴中靠近弯道一侧的车轮确定为所述目标车轮。
33、在本技术一实施例中,在车辆进入转向打滑状态的情况下,确定所述车辆的打滑轴和非打滑轴的步骤之前,所述方法还包括:
34、在所述车辆进入坡道驱动状态的情况下,获取所述车辆所处坡道的坡度以及所述车辆的整车需求扭矩;
35、基于所述坡度,确定前轴扭矩分配系数和后轴扭矩分配系数;其中,若所述车辆处于上坡驱动工况,则所述前轴扭矩分配系数小于所述后轴扭矩分配系数;若所述车辆处于下坡驱动工况,则所述前轴扭矩分配系数大于所述后轴扭矩分配系数;
36、基于所述前轴扭矩分配系数和所述整车需求扭矩,控制前驱电机输出扭矩;
37、基于所述后轴扭矩分配系数和所述整车需求扭矩,控制后驱电机输出扭矩。
38、在本技术一实施例中,所述方法还包括:
39、在检测到任一车轮打滑的情况下,基于所述车轮的滑移率和车辆参考车速,确定所述车轮的转速阈值范围;所述车辆参考车速表征所述车辆正常行驶状态下的车速;
40、在检测到该车轮的实际转速超出所述转速阈值范围的情况下,控制该车轮对应的驱动电机进行降扭操作。
41、第二方面,基于相同发明构思,本技术实施例提供了一种车辆控制装置,所述装置包括:
42、打滑状态确定模块,用于在车辆进入转向打滑状态的情况下,确定所述车辆的打滑轴和非打滑轴;
43、防滑扭矩确定模块,用于基于所述打滑轴对应的打滑车轮的滑移率,确定第一驱动电机的防滑扭矩;所述第一驱动电机用于驱动所述打滑轴;
44、补偿扭矩确定模块,用于基于所述防滑扭矩和所述第一驱动电机的当前输出扭矩,确定第二驱动电机的补偿扭矩;所述第二驱动电机用于驱动所述非打滑轴;
45、降扭控制模块,用于基于所述防滑扭矩,控制所述第一驱动电机进行降扭操作;
46、增扭控制模块,用于基于所述补偿扭矩,控制所述第二驱动电机进行增扭操作;
47、制动控制模块,用于基于所述车辆的转向信号,在所述非打滑轴对应的车轮中确定目标车轮,并控制所述目标车轮进行制动。
48、在本技术一实施例中,所述车辆控制装置还包括:
49、第一获取模块,用于获取所述车辆的各个车轮的滑移率和方向盘转角值;
50、转向打滑状态确定模块,用于在检测到任一车轮的滑移率大于滑移率阈值且所述方向盘转角值大于转角阈值的情况下,确定所述车辆进入所述转向打滑状态。
51、在本技术一实施例中,所述打滑状态确定模块包括:
52、平均滑移率确定子模块,用于基于所述各个车轮的滑移率,确定前轴车轮的平均滑移率和后轴车轮的平均滑移率;
53、第一状态确定子模块,用于在所述前轴车轮的平均滑移率小于所述后轴车轮的平均滑移率的情况下,确定所述前轴为所述非打滑轴,所述后轴为所述打滑轴;
54、第二状态确定子模块,用于在所述前轴车轮的平均滑移率大于或者等于所述后轴车轮的平均滑移率的情况下,确定所述前轴为所述打滑轴,所述后轴为所述非打滑轴。
55、在本技术一实施例中,所述防滑扭矩确定模块包括:
56、附着系数确定子模块,用于基于所述打滑车轮的滑移率,确定所述打滑车轮所在路面的附着系数;
57、防滑扭矩确定子模块,用于基于所述附着系数,确定所述防滑扭矩。
58、在本技术一实施例中,降扭控制模块具体用于基于所述防滑扭矩,控制所述第一驱动电机进行降扭操作,以使所述第一驱动电机的输出扭矩降低至所述防滑扭矩。
59、在本技术一实施例中,所述增扭控制模块包括:
60、目标扭矩确定子模块,用于基于所述补偿扭矩和所述第二驱动电机的当前输出扭矩,确定所述第二驱动电机的目标扭矩;
61、增扭控制子模块,用于基于所述目标扭矩,控制第二驱动电机进行增扭操作,以使所述第二驱动电机的输出扭矩增加至所述目标扭矩。
62、在本技术一实施例中,所述车辆控制装置还包括:
63、发动机补偿扭矩确定模块,用于在所述非打滑轴连接有发动机且所述目标扭矩大于所述第二驱动电机的可持续输出扭矩的情况下,基于所述目标扭矩和所述可持续输出扭矩,确定发动机补偿扭矩;
64、发动机扭矩控制模块,用于控制所述发动机按照所述发动机补偿扭矩进行输出。
65、在本技术一实施例中,所述制动控制模块包括:
66、第一目标车轮确定子模块,用于在所述转向信号表征左转且非打滑轴为前轴的情况下,将所述前轴中远离弯道一侧的车轮确定为所述目标车轮;
67、第二目标车轮确定子模块,用于在所述转向信号表征左转且非打滑轴为后轴的情况下,将所述后轴中靠近弯道一侧的车轮确定为所述目标车轮;
68、第三目标车轮确定子模块,用于在所述转向信号表征右转且非打滑轴为前轴的情况下,将所述前轴中远离弯道一侧的车轮确定为所述目标车轮;
69、第四目标车轮确定子模块,用于在所述转向信号表征右转且非打滑轴为后轴的情况下,将所述后轴中靠近弯道一侧的车轮确定为所述目标车轮。
70、在本技术一实施例中,所述车辆控制装置还包括:
71、第二获取模块,用于在所述车辆进入坡道驱动状态的情况下,获取所述车辆所处坡道的坡度以及所述车辆的整车需求扭矩;
72、分配系数确定模块,用于基于所述坡度,确定前轴扭矩分配系数和后轴扭矩分配系数;其中,若所述车辆处于上坡驱动工况,则所述前轴扭矩分配系数小于所述后轴扭矩分配系数;若所述车辆处于下坡驱动工况,则所述前轴扭矩分配系数大于所述后轴扭矩分配系数;
73、前驱电机扭矩控制模块,用于基于所述前轴扭矩分配系数和所述整车需求扭矩,控制前驱电机输出扭矩;
74、后驱电机扭矩控制模块,用于基于所述后轴扭矩分配系数和所述整车需求扭矩,控制后驱电机输出扭矩。
75、在本技术一实施例中,所述车辆控制装置还包括:
76、转速阈值范围确定模块,用于在检测到任一车轮打滑的情况下,基于所述车轮的滑移率和车辆参考车速,确定所述车轮对应的驱动电机的转速阈值范围;所述车辆参考车速表征所述车辆正常行驶状态下的车速;
77、转速控制模块,用于在检测所述车轮对应的驱动电机的实际转速超出所述转速阈值范围的情况下,控制所述车轮对应的驱动电机进行降扭操作。
78、第三方面,基于相同发明构思,本技术实施例提供了一种存储介质,所述存储介质内存储有机器可执行指令,所述机器可执行指令被处理器执行时实现本技术第一方面提出的车辆控制方法。
79、第四方面,基于相同发明构思,本技术实施例提供了一种车辆,包括处理器和存储器,所述存储器存储有能够被所述处理器执行的机器可执行指令,所述处理器用于执行机器可执行指令,以实现本技术第一方面提出的车辆控制方法。
80、与现有技术相比,本技术包括以下优点:
81、本技术实施例提供的一种车辆控制方法,能够在车辆进入转向打滑状态的情况下,基于打滑轴对应的打滑车轮的滑移率,确定用于驱动打滑轴的第一驱动电机的防滑扭矩,以及用于驱动非打滑轴第二驱动电机的补偿扭矩,进而可以基于防滑扭矩,控制第一驱动电机进行降扭操作,基于补偿扭矩,控制第二驱动电机进行增扭操作;同时,能够基于车辆的转向信号,在非打滑轴对应的车轮中确定目标车轮,并控制目标车轮进行制动。本技术实施例能够在车辆进入转向打滑状态时,快速有效地根据打滑情况对前轴和后轴输出扭矩进行调节,并通过对非打滑轴的目标车轮进行制动,可以进一步稳定车身姿态,提高车辆的转向操控稳定性与安全性。
- 还没有人留言评论。精彩留言会获得点赞!