基于云计算的汽车后视镜控制系统及方法与流程
本发明涉及汽车后视镜控制,具体为基于云计算的汽车后视镜控制系统及方法。
背景技术:
1、随着汽车数量的增加,车辆的主动安全越来越受到人们的重视,而驾驶员视野对主动安全至关重要,汽车后视镜系统作为车上重要的视野扩展系统,在用户的使用舒适性、便利性和安全性方面,承担着重要的职责;尤其是在驾驶员坐在驾驶室座位上获取汽车后方、侧方和下方等外部信息的工具时,有效且安全的获取信息是汽车后视镜控制系统发挥作用的基本方针;而在实际驾驶中,由于副驾驶人员的乘坐习惯可能会产生调整座椅距离的情况,此时就会导致副驾驶人员的不当操作造成驾驶室人员通过右侧后视镜获取车外信息时产生障碍;且由于车辆在行驶过程中,驾驶人员的话语告知会分散注意力以及副驾驶人员对遮挡程度的判断具有不明确性,给驾驶人员带来了极大的安全隐患。
技术实现思路
1、本发明的目的在于提供基于云计算的汽车后视镜控制系统及方法,以解决上述背景技术中提出的问题。
2、为了解决上述技术问题,本发明提供如下技术方案:基于云计算的汽车后视镜控制方法,包括以下分析步骤:
3、步骤s1:将提取得到汽车驾驶用户权限的车联网运行数据存储至汽车分析数据库;以汽车分析数据库中同一驾驶用户在监测周期内的车联网运行数据为监测单元;分析监测单元中存在的安全事件并生成安全事件对应的目标特征区间;
4、步骤s2:分析车内存在的状态特征属于目标特征区间时,提取车联网运行数据包含的硬件信息,硬件信息是指汽车后视镜的角度数据和副驾驶座椅的位置数据,并分析传输使车内存在的状态特征不属于目标特征区间时的目标调节数据;
5、步骤s3:以按时间发展顺序的车内状态特征变化周期为一分析单元,提取监测周期内所包含分析单元对应的可调节数据,判断车内实时的车联网运行数据是否存在触发控制信号,当存在触发控制信号时,传输触发控制信号对应的触发指令进行调节;当不存在触发控制信号时,输出汽车后视镜对应的预警角度;车内状态特征变化周期是指监测周期内相邻车内状态特征属于目标状态区间到车内状态特征不属于目标状态区间时对应的时间周期;
6、步骤s4:基于触发控制信号判断结果对应的输出数据,分析汽车后视镜的最优控制角度。
7、进一步的,步骤s1中分析监测单元中存在的安全事件并生成安全事件对应的目标特征区间,包括以下分析步骤:
8、步骤s11:提取车联网运行数据包含的图像数据和音频数据,图像数据是指驾驶员在车内监控记录的行为图像;获取车辆发生异动前且副驾驶位置为无人状态时目标监测时段内的图像数据为有效图像数据,异动是指车辆在目标监测时段内维持一种行径状态时存在行径状态发生改变的行为,且行径状态发生改变是指需利用车辆右侧后视镜实现的行径状态改变;
9、步骤s12:获取每次异动下有效图像数据中记录驾驶人员的头部右转动作次数n、车辆响应异动时到记录驾驶人员最后一次头部右转的间隔时长t和头部转向角度差值e0;利用公式:
10、y=α1*[(1/n)∑n]+α2*[(1/n)∑t]+α3*[(1/n)∑e0]
11、计算驾驶异动对应的安全驾驶指数y,其中n表示监测周期内发生的异动总次数;头部转向角度差值e0表示在一次异动下的头部右转动次数大于一时,e0=maxe-mine;而在一次异动下的头部右转动次数为一时,e0表示该次转向角度;其中maxe表示一次异动下头部右转角度最大值,mine表示一次异动下头部右转角度最小值;分析转向角度差值是为了判断驾驶人员在正常驾驶中产生异动前的行为阈值,且转向角度差值越大说明后视镜当前的角度供给驾驶人员看到实时路况的难度越大;α1表示头部转动次数对应的参考系数,α2表示间隔时长对应的参考系数,α3表示头部转动角度差值对应的参考系数,0<α1、α2、α3<1;在实际生活中当驾驶人员想要看车辆右方后视镜执行车辆状态变更操作时,驾驶人员的头部转向频率、转向角度变化以及从动作产生到执行异动的响应时长均可反应出在后视镜没有遮挡情况下驾驶员反应出的安全状态特征;
12、步骤s13:提取车辆发生异动前且副驾驶位置为有人状态时目标监测时段内的图像数据为待考察图像数据、音频数据为待考察音频数据;
13、当待考察音频数据中存在目标关键词且待考察图像数据中存在驾驶员头部向右转动行为时,标记目标关键词出现前目标监测时段对应的事件为安全事件;
14、当待考察音频数据中不存在目标关键词时,获取待考察图像数据中在目标监测时段的头部右转动作次数、间隔时长和头部转向角度差值,并计算实时安全驾驶指数y0,提取y0>y时对应的事件为安全事件;
15、步骤s14:提取安全事件中车联网运行数据记录副驾驶人员的图像数据为目标考察图像数据,输出目标考察图像数据记录的副驾驶人员对应的遮挡界限为状态特征,遮挡界限是指副驾驶人员在安全事件中的分割比q,并提取分割比的最小值和最大值构成的数值范围为目标特征区间,q=s1/s2,s1表示由副驾驶人员分割前向车窗图像对应的面积,s2表示由副驾驶人员分割后向车窗图像对应的面积。前向是指与副驾驶人员视线相同的方向;q越大表示副驾驶人员遮挡的比例越小,则驾驶员越能有效看到右侧后视镜。分析状态特征是避免在遮挡后视镜状态下由于副驾驶人员未能及时移动造成的安全隐患,通过智能控制分析来提高驾驶安全性以及车内驾驶的智能化。
16、进一步的,步骤s2包括以下分析步骤:
17、步骤s21:获取车内存在的状态特征属于目标特征区间时对应的汽车后视镜角度数据和副驾驶座椅的位置数据;角度数据是指后视镜与车身视线方向构成的夹角,位置数据是指座椅可调节连接处与滑轨最前端的直线距离;
18、步骤s22:提取同一状态特征同一后视镜角度数据下记录的可调节数据z,可调节数据是指车内存在的状态特征不属于目标特征区间时所调节的位置数据,提取可调节数据的最小值minz作为状态特征下对应后视镜角度数据的目标调节数据。
19、进一步的,步骤s3包括以下分析步骤:
20、获取监测周期内同一后视镜角度数据下不同分析单元对应的目标调节数据;计算监测周期内后视镜角度的触发指数r,r=[m{minz}max]/m0;其中m{minz}max表示分析单元对应目标调节数据的最大值等于滑轨的总长度时对应的调节次数,m0表示监测周期包含所有分析单元的总调节次数;
21、当后视镜角度数据处于合理放置情况下,座椅的距离调整一般不会调整到最大值,而与滑轨相同时说明调节到最大值;触发指数越大说明当前后视镜角度数据存在异常的可能性越大;
22、获取不同分析单元是因为存在由于副驾驶人员的不同造成用户自主调节距离多样化的情况;
23、设置触发指数阈值r0,当r<r0时,输出车内实时的车联网运行数据存在触发控制信号,调取与触发指数对应的后视镜角度数据相同时相应的目标调节数据作为触发指令,并基于触发指令进行副驾驶座椅的自动调节;
24、当r0≤r时,提取触发指数对应的后视镜角度数据为异常角度数据,获取异常角度数据的最大值为预警角度。
25、进一步的,步骤s4包括以下分析步骤:
26、剔除输出数据为预警角度时对应的后视镜角度数据;剔除该数据是要避免不当角度数据对分析合理情况下调整最优角度数据的影响;
27、获取第i种后视镜角度数据对应触发指令在监测周期内的执行次数di,以及触发指令对应的目标调节数据与调节前的位置数据的距离平均差值hi,距离平均差值是指同一后视镜角度数据下不同触发指令对应调节距离差值的平均值;利用公式:
28、wi=k1*hi+k2*di
29、计算第i种后视镜角度数据的控制系数wi,其中k1表示执行次数对应的参考系数,k2表示距离平均差值对应的参考系数,0<k1、k2<1;
30、输出控制系数wi为最小值时对应的后视镜角度数据为最优控制角度。
31、分析距离差值可以反应出副驾驶座位人员遮挡的严重情况以及所需调节的难易程度,距离差值越小反应出副驾驶人员对座椅的智能调节影响越小,则舒适度越高;分析最优控制角度可以避免因系统在分析过程中频繁的调节座椅使其副驾驶人员感到不适,且在最优控制角度下可以快速安全的调节座椅距离实现后视镜的使用高效性和安全性。
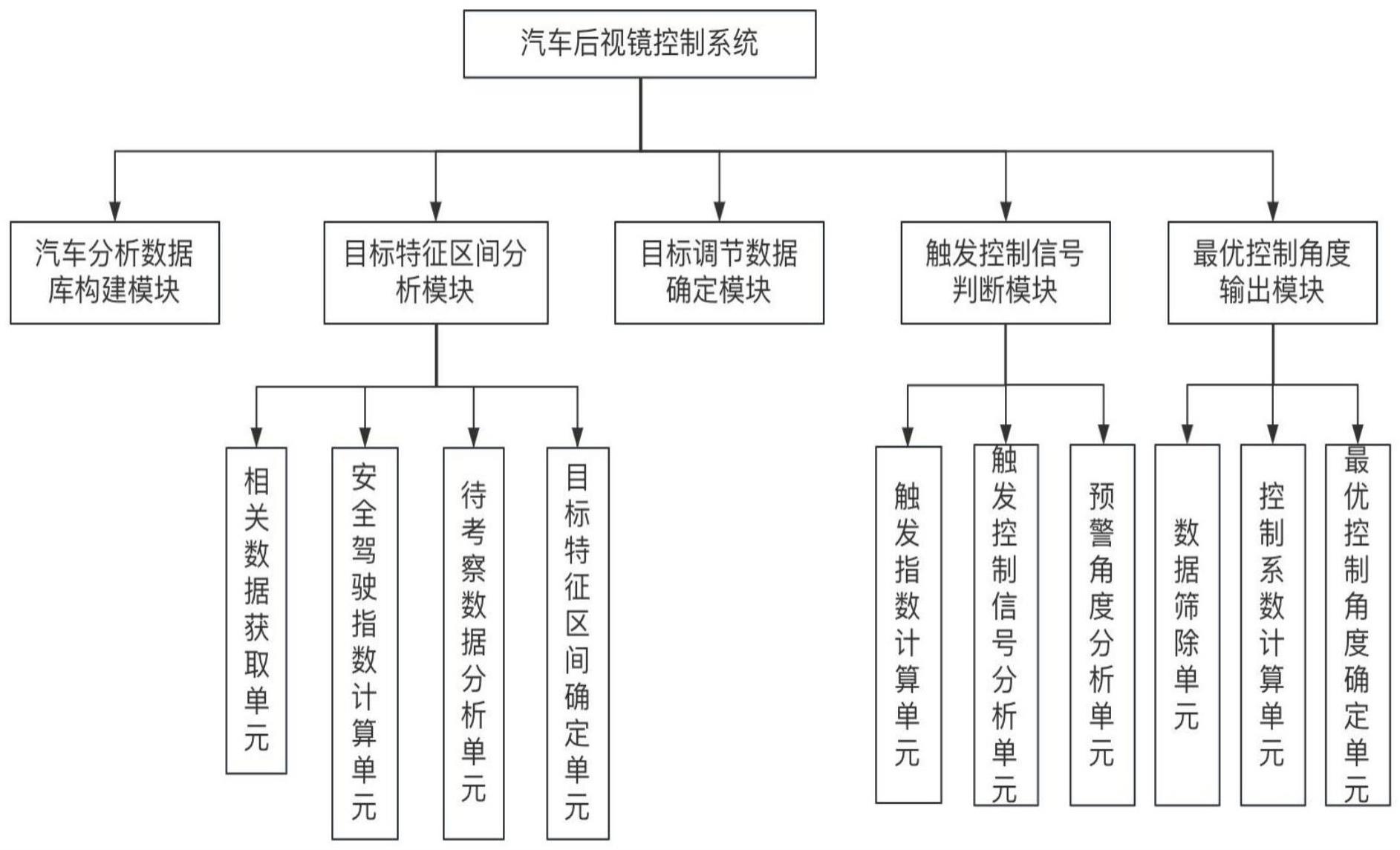
32、汽车后视镜控制系统,包括汽车分析数据库构建模块、目标特征区间分析模块、目标调节数据确定模块、触发控制信号判断模块和最优控制角度输出模块;
33、汽车分析数据库构建模块用于将提取得到汽车驾驶用户权限的车联网运行数据存储至汽车分析数据库;
34、目标特征区间分析模块用于分析监测单元中存在的安全事件并生成安全事件对应的目标特征区间;
35、目标调节数据确定模块用于分析传输使车内存在的状态特征不属于目标特征区间时的目标调节数据;
36、触发控制信号判断模块用于提取监测周期内所包含分析单元对应的可调节数据,判断车内实时的车联网运行数据是否存在触发控制信号;
37、预警调节模块用于当不存在触发控制信号时,输出汽车后视镜对应的预警角度,以及存在触发控制信号时,传输触发控制信号对应的触发指令进行调节;
38、最优控制角度输出模块用于基于触发控制信号判断结果对应的输出数据,分析汽车后视镜的最优控制角度。
39、进一步的,目标特征区间分析模块包括相关数据获取单元、安全驾驶指数计算单元、待考察数据分析单元和目标特征区间确定单元;
40、相关数据获取单元用于提取车联网运行数据包含的图像数据和音频数据;
41、安全驾驶指数计算单元用于获取每次异动下有效图像数据中记录驾驶人员的头部右转动作次数、车辆响应异动时到记录驾驶人员最后一次头部右转的间隔时长和头部转向角度差值,计算安全驾驶指数;
42、待考察数据分析单元用于提取车辆发生异动前且副驾驶位置为有人状态时目标监测时段内的图像数据为待考察图像数据、音频数据为待考察音频数据,并分析输出安全事件;
43、目标特征区间确定单元用于输出待考察图像数据记录的副驾驶人员对应的遮挡界限为状态特征,遮挡界限是指副驾驶人员在安全事件中的分割比q,并提取分割比的最小值和最大值构成的数值范围为目标特征区间。
44、进一步的,触发控制信号判断模块包括触发指数计算单元、触发控制信号分析单元和预警角度分析单元;
45、触发指数计算单元用于获取监测周期内同一后视镜角度数据下不同分析单元对应的目标调节数据;计算监测周期内后视镜角度的触发指数;
46、触发控制信号分析单元用于设置触发指数阈值,输出车内实时的车联网运行数据存在触发控制信号;
47、预警角度分析单元用于在触发指数大于等于触发指数阈值时,提取触发指数对应的后视镜角度数据为异常角度数据,获取异常角度数据的最大值为预警角度。
48、进一步的,最优控制角度输出模块包括数据筛除单元、控制系数计算单元和最优控制角度确定单元;
49、数据筛除单元用于剔除输出数据为预警角度时对应的后视镜角度数据;
50、控制系数计算单元用于获取后视镜角度数据对应触发指令在监测周期内的执行次数,以及触发指令对应的目标调节数据与调节前的位置数据的距离平均差值,计算控制系数;
51、最优控制角度确定单元用于输出控制系数wi为最小值时对应的后视镜角度数据为最优控制角度。
52、与现有技术相比,本发明所达到的有益效果是:本发明通过对有权限车联网内记录的驾驶运行数据进行提取分析,得到由于后侧后视镜的可能遮挡情况对驾驶员造成安全隐患的安全事件以及对应的状态特征;并在状态特征确定情况下分析状态特征改变的驱使调节数据,使其在实时监测中可对照历史驱使调节数据实现对实时判断下的数据调用;本发明还对汽车后视镜的异常角度进行判断,以至于可以实现在汽车启动时对异常角度的后视镜角度数据进行及时调整,避免较大程度的影响驾驶员驾驶安全情况的产生;同时本发明还将不同角度下座椅调节的频次最小、乘坐人的舒适状态作为衡量指令,分析得到最优的后视镜角度数据;使得车辆可以智能调节座椅并且保证了驾驶人的安全性和乘坐人的舒适性。
- 还没有人留言评论。精彩留言会获得点赞!