一种安装油气悬架的重型车辆整车半主动阻尼协调控制方法
本发明属于悬架系统的,具体涉及一种安装油气悬架的重型车辆整车半主动阻尼协调控制方法。
背景技术:
1、重型车辆要求有高机动性能,而高速机动过程中重型车辆行驶的安全性以及对车载仪器和装备的振动影响等问题需要进一步改善。车辆的平顺性主要受车身垂向和俯仰振动影响,操稳性主要受侧倾振动影响,重型车辆在复杂路面行驶过程中,垂向、侧倾和俯仰三个方向的振动会对装备和仪器造成破坏以及影响驾驶员的疲劳程度。被动油气悬架在外部路面激励下无法进行参数调整,因此只能在特定工况下达到最优效果。半主动油气悬架不改变悬架的刚度而只考虑改变悬架的阻尼,其结构简单、成本低、耗能低,又能获得与主动悬架相近的性能。
2、目前,半主动悬架主要实现对悬架阻尼系数的有级可控或无级可控。有级可控只能在预先设定的几个不同阻尼级之间进行调节,而无级可控悬架可通过连续可控阻尼方式,传感器获得车辆和路况的实时状态,控制单元通过控制算法得到实时状态下阻尼可调量,并发出控制指令实现阻尼连续可调,保证整车在垂向、侧倾和俯仰的耦合控制。
技术实现思路
1、针对以上问题,为进一步满足重型车辆在复杂路况行驶的高机动性能,保证车辆的行驶平顺性以及装备的可靠性,本发明在现有装有同侧耦连油气悬架系统的重型车辆基础上探究了重型车辆在复杂路况行驶条件下有效的半主动阻尼控制的实现方法,在此阻尼可控的基础上对整车油气悬架半主动阻尼控制策略进行研究,实现整车车身垂向、侧倾和俯仰运动协调控制,以进一步提升重型车辆高速重载下的行驶平顺性,改善车身振动特性。
2、为了实现上述目的,本发明所采用的技术方案如下:
3、一种安装油气悬架的重型车辆整车半主动阻尼协调控制方法,其特征在于:包括:
4、步骤1:建立可调阻尼力数学模型,得到阀系阻尼力;
5、步骤2:建立整车参考模型运动微分方程;
6、步骤3:建立基于油气悬架的整车弹性力和阻尼力模型,步骤1的阀系阻尼力为该模型的输入;
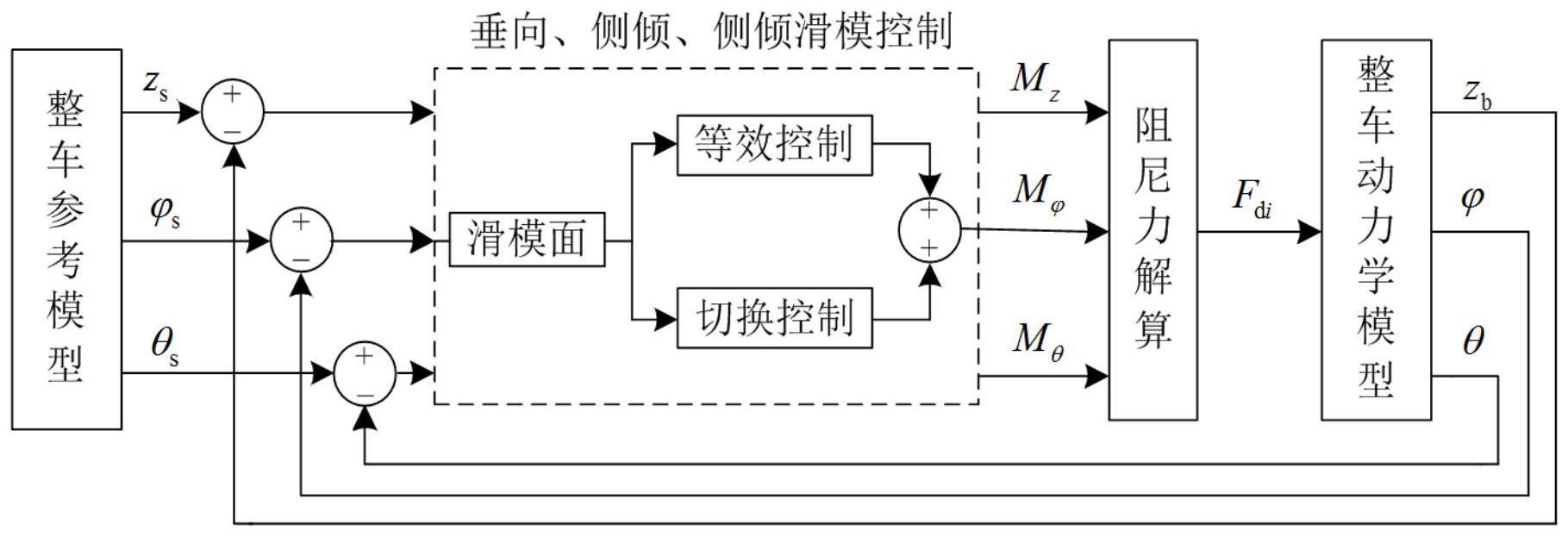
7、步骤4:利用步骤3建立的力模型,结合步骤2,设计整车半主动阻尼协调滑模控制算法,协调控制各悬架可控阻尼力,实现整车车身垂向、侧倾和俯仰状态能够跟随参考模型状态变化。
8、优选的,所述步骤1的可调阻尼力数学模型为:
9、压缩行程:
10、
11、拉伸行程:
12、
13、式中,
14、又因为:
15、
16、阀系阻尼力为
17、fd=δpa2 (4)
18、式中,dc是阀孔直径;h是阀口开度;k、l0分别是预紧弹簧的刚度和初始压缩量;δp是阀芯两侧压差,δp=pout-pin;fs是稳态液动力,fs=cdπdchδpsin(2θ),θ是液流角,为活塞杆相对速度,a2是环形腔面积。
19、优选的,所述步骤2包括:
20、步骤2.1:通过传感器测量油气悬架的相对速度和相对位移,从而通过油气悬架模型得到油气悬架的输出力,则整车两自由度参考模型的振动微分方程为:
21、
22、式中,分别是参考模型中车身质心的垂向加速度和速度;csky是天棚阻尼系数;zb-zt、分别是传感器获得的悬架振动的位移和速度;fk(zb-zt)、分别是油气悬架液压模型的弹性力和阻尼力;q为路面不平度输入,zt为轮胎变形量;mb、mt分别是簧上质量和簧下质量;
23、步骤2.2:基于两自由度改进的天棚阻尼模型建立整车天棚阻尼参考模型,假设每个悬架连接车身位置处与天空参考系之间都有一个阻尼系数为csky的阻尼器,在参考模型中,假设车身质心参考垂向位移、参考侧倾角和参考俯仰角分别是垂向运动下,阻尼器对车身产生的阻尼力侧倾运动下,侧倾速度为阻尼器产生的阻尼力为则左侧抗侧倾力矩为:右侧抗侧倾力矩为总抗侧倾力矩b是左右悬架安装距,根据抗侧倾力矩分析方法同理得到由阻尼器产生的抗俯仰力矩:其中a1、a2、b2、b1分别是车身质心到一、二、三、四轴的距离,mb是车身质量、mti是簧下质量;ir是车身侧倾转动惯量、ip是车身俯仰转动惯量;kt是轮胎刚度;zgi是各轮路面输入;fi是各悬架输出力,得到整车参考模型运动微分方程:
24、
25、步骤2.3:定义广义车身质量矩阵令输出力f=[f1 ... f8]t,整车天棚阻尼参考模型车身运动微分方程表示成矩阵形式:
26、
27、式中,
28、
29、同理得到,整车车身运动方程的矩阵表达式:
30、
31、式中,
32、优选的,所述步骤3具体为:
33、油气悬架输出力fi包括蓄能器中由气体压缩产生的弹性力fki和油液经过阻尼阀系和管路产生的阻尼力fdi,根据同侧耦连油气悬架系统,左右两侧4个油缸分别共用一个蓄能器,为简化输出力模型,则弹性力表示为:
34、
35、
36、式中,pg0为蓄能器初始压力;vg0为蓄能器初始容积;a为蓄能器截面积;mi为油气弹簧支撑等效质量,r为气体指数,q为单位时间流出蓄能器的流量,z为悬架变形;
37、假设阻尼力线性变化,阻尼系数常数,则油气弹簧输出阻尼力为:
38、
39、式中,c是被动油气悬架阻尼系数,δfdi是半主动阻尼协调滑模控制系统的输出阻尼力。
40、优选的,所述步骤4包括:
41、步骤4.1:基于整车半主动阻尼协调控制系统,确定垂向、侧倾和俯仰滑模控制器输出的控制力和力矩,并计算得到悬架各个油缸可控阻尼力,定义整车动力学系统跟踪误差向量,进而求得滑模面函数;
42、步骤4.2:通过等效控制力矩和切换控制力矩,进而求得整车垂向、侧倾和俯仰滑模控制中输出力矩;
43、步骤4.3:采用滑模控制,实现对步骤4.2等效控制力矩和切换控制力矩的控制,进而实现整车车身垂向、侧倾和俯仰状态能够跟随参考模型状态变化。
44、优选的,所述步骤4.1具体为:
45、步骤4.1.1:垂向、侧倾和俯仰滑模控制器输出的控制力和力矩为控制力和力矩m由可控阻尼力δfdi产生,令δfd=[δfd1 ... δfd8]t,得:
46、m=ηδfd (12)
47、步骤4.1.2:通过式(12)得到悬架各个油缸可控阻尼力为:
48、δfd=η+m (13)
49、式中,h为传递矩阵,η+为η的伪逆;
50、步骤4.1.3:根据半主动悬架阻尼约束条件,阻尼力控制量δfdi进一步可表示为:
51、
52、步骤4.1.4:定义整车动力学系统跟踪误差向量:
53、
54、其中,e为状态量的输出偏差;zs为状态量;
55、步骤4.1.5:采用线性切换函数来确定滑模面s,滑模面如下:
56、定义,c为滑模参数矩阵,且满足hurwitz条件,则:
57、
58、优选的,所述步骤4.2具体为:
59、整车垂向、侧倾和俯仰滑模控制中输出力矩应包括等效控制力矩meq和切换控制力矩msw,即:
60、m=meq+msw (17)
61、等效控制力矩meq的作用是驱使整车动力学系统状态沿着滑模面运动,而切换控制力矩msw的作用是驱使整车动力学系统达到滑模面。
62、优选的,所述步骤4.3的滑模控制过程包括等效控制力矩meq和切换控制力矩msw的控制。
63、优选的,所述等效控制力矩meq具体为:
64、滑模面函数满足则等效控制力矩meq为:
65、
66、联立式(7)、(8)、(16)、(18),得到:
67、
68、优选的,所述切换控制力矩msw具体为:
69、s1:采用等速趋近方法,切换控制力矩msw使得整车动力学系统状态趋近滑模切换面s=0,则切换控制力矩为:
70、msw=-ksgn(s) (20)
71、式中,k为切换控制增益系数矩阵;
72、s2:定义lyapunov函数为则保证滑模的可达性和存在性条件为:其中,η为正常数,则整车滑模控制系统的稳定性条件为:
73、
74、式中,ηz、ηθ分别为任意小的正数;
75、s3:因等效控制meq的作用是确保s=0,则式(21)改写为:
76、
77、由式(22)可知,当切换控制增益系数满足滑模控制系统满足利亚普诺夫稳定性条件;
78、s4:为在滑模控制系统中防止抖振,用饱和函数代替式(19)中切换控制力矩msw表达式中符号函数,在边界层内采用反馈控制以降低在快速切换时产生的抖振,即得到最终切换控制力矩msw:
79、msw=-ksat(σ-1s) (23)
80、式中,σ是准滑动模态的边界层厚度矩阵,
81、
82、s5:联立式(13)、(14)、(17)、(19)和(23),可得到整车半主动阻尼协调滑模控制各悬架输出的最优阻尼力δfd。
83、与现有技术相比,本发明的有益效果是:
84、1.无级可控悬架可通过连续可控阻尼方式,传感器获得车辆和路况的实时状态,控制单元通过控制算法得到实时状态下阻尼可调量,实时调整悬架的阻尼力输出。
85、2.建立整车在垂向、侧倾和俯仰的耦合模型,通过滑模解耦控制,实现对整车多维度的控制。
- 还没有人留言评论。精彩留言会获得点赞!