通行控制方法、装置、电子设备、存储介质及车辆与流程
本发明涉及泊车路径规划,具体涉及一种通行控制方法、装置、电子设备、存储介质及车辆。
背景技术:
1、随着车辆数量的增加使城市有限的空间变得逐渐拥挤,泊车空间的缩小增加了泊车困难,因此人们对辅助泊车系统的需求日益增加。目前,泊车辅助系统已经作为高端配置逐渐应用在了部分车辆上,以协助驾驶员完成泊车过程,其主要包括识别系统、路径规划系统以及泊车控制系统三个部分。在整个泊车过程中,一般先由感知识别系统对空间中的车位以及车位周围的障碍物信息进行识别,然后将所识别的环境信息传输给路径规划系统,由路径规划系统根据传感器采集到的信息进行泊车路径规划,最后由泊车控制系统根据规划的路径将路径信息转化成控制决策,对车辆的转角、速度、档位等进行控制,同时将执行结果反馈给中央处理器,以方便中央处理器进一步分析和制定决策。
2、然而,现有的泊车辅助系统仅仅针对存在障碍的路径进行避障规划,但是在停车场泊车过程中,常常会遇到比较窄的直角弯道,可能无法一次性通过,若轨迹规划不好,一方面可能导致车辆与周边障碍物发生碰撞,另一方面即使车辆自带脱困功能,也会增加通行时间,降低通行效率。
技术实现思路
1、本发明实施例的目的在于提供一种通行控制方法、装置、电子设备、存储介质及车辆,解决现有的泊车辅助系统仅仅针对存在障碍的路径进行避障规划,但是在停车场泊车过程中,常常会遇到比较窄的直角弯道,可能无法一次性通过,若轨迹规划不好,一方面可能导致车辆与周边障碍物发生碰撞,另一方面即使车辆自带脱困功能,也会增加通行时间,降低通行效率的问题,具体技术方案如下:
2、根据本技术实施例的第一方面,提供一种通行控制方法,所述方法包括:
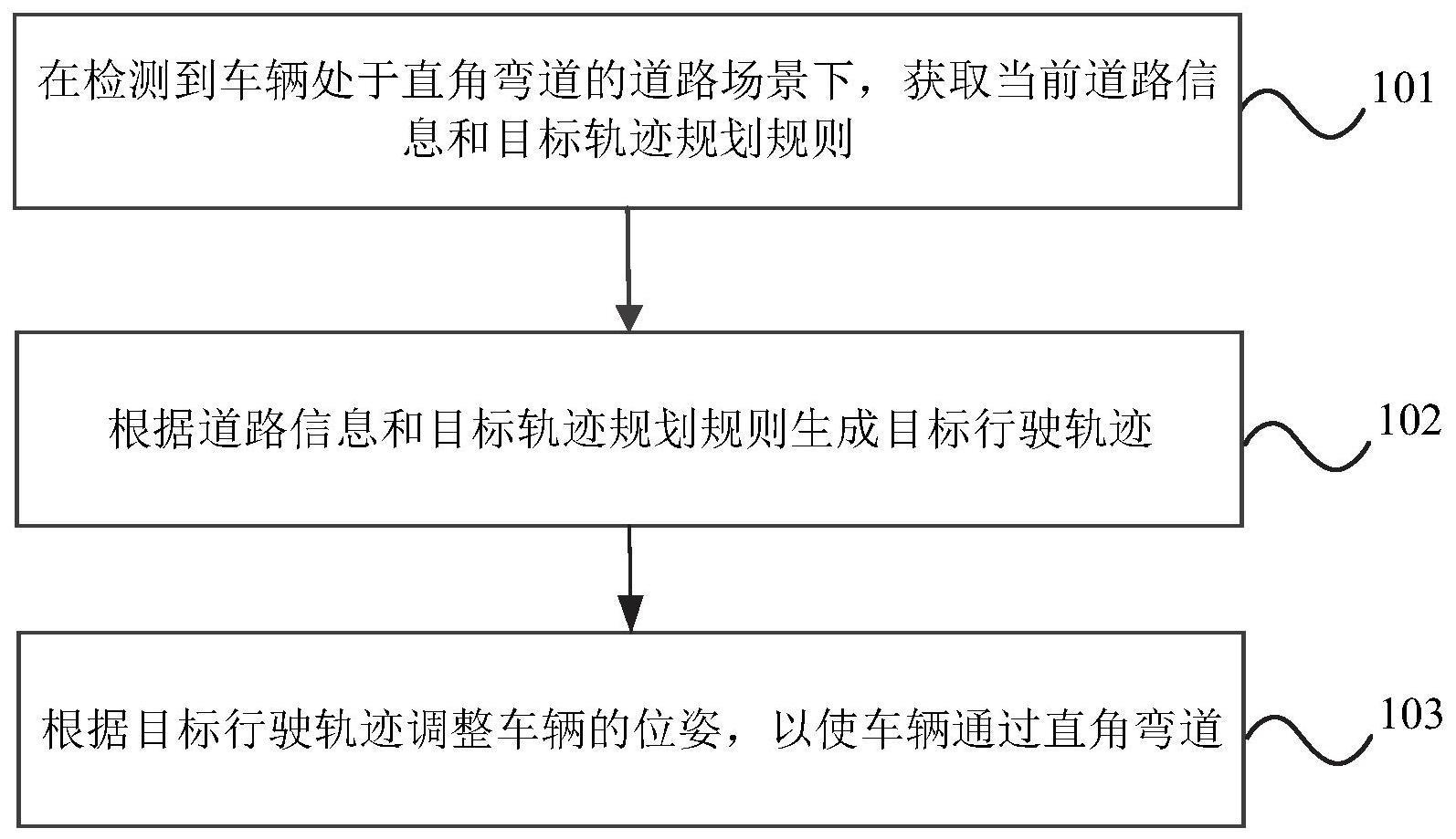
3、在检测到车辆处于直角弯道的道路场景下,获取当前道路信息和目标轨迹规划规则;
4、根据所述道路信息和所述目标轨迹规划规则生成目标行驶轨迹;
5、根据所述目标行驶轨迹调整所述车辆的位姿,以使所述车辆通过所述直角弯道。
6、可选的,所述当前道路信息包括当前道路宽度信息,当前道路的车辆信息以及当前道路中位于直角弯道的障碍物信息,其中,所述车辆信息包括车辆宽度信息,车辆与道路两侧的距离信息以及车辆与道路弯道顶点的距离信息,所述障碍物信息包括障碍物的属性信息以及障碍物的位置信息。
7、可选的,根据所述道路信息和所述目标轨迹规划规则生成目标行驶轨迹,包括:
8、获取直角弯道的路径信息;
9、根据所述车辆宽度信息和所述目标轨迹规划规则,确定所述车辆入弯时与外侧的第一距离;
10、根据所述车辆宽度信息和所述目标轨迹规划规则,确定所述车辆出弯时与内侧的第二距离;
11、根据所述第一距离,所述第二距离以及所述路径信息,生成所述车辆的目标行驶轨迹。
12、可选的,根据所述目标行驶轨迹调整所述车辆的位姿,包括:
13、根据所述车辆与道路两侧的距离信息和所述目标行驶轨迹,确定所述车辆的横向调整位移;
14、根据所述车辆与道路弯道顶点的距离信息与所述目标行驶轨迹,确定所述车辆的垂直调整位移;
15、根据所述横向调整位移和所述垂直调整位移调整所述车辆的位姿。
16、可选的,所述在检测到车辆处于直角弯道的道路场景下,获取当前道路信息和目标轨迹规划规则之前,还包括:
17、通过摄像头获取第一道路信息;
18、通过雷达获取第二道路信息;
19、将所述第一道路信息和所述第二道路信息进行比对,生成道路信息的误差值;
20、若所述误差值大于目标阈值,则发送报警信息;
21、若所述误差值小于目标阈值,则将所述第一道路信息和所述第二道路信息融合计算,生成当前道路信息。
22、可选的,所述在检测到车辆处于直角弯道的道路场景下,获取当前道路信息和目标轨迹规划规则之前,还包括:
23、获取所述车辆的导航路径信息;
24、根据所述导航路径信息确定所述车辆处于直角弯道的道路场景。
25、根据本技术实施例的第二方面,提供一种通行控制装置,所述装置包括:
26、第一获取模块,用于在检测到车辆处于直角弯道的道路场景下,获取当前道路信息和目标轨迹规划规则;
27、第一生成模块,用于根据所述道路信息和所述目标轨迹规划规则生成目标行驶轨迹;
28、第一调整模块,用于根据所述目标行驶轨迹调整所述车辆的位姿,以使所述车辆通过所述直角弯道。
29、可选的,所述当前道路信息包括当前道路宽度信息,当前道路的车辆信息以及当前道路中位于直角弯道的障碍物信息,其中,所述车辆信息包括车辆宽度信息,车辆与道路两侧的距离信息以及车辆与道路弯道顶点的距离信息,所述障碍物信息包括障碍物的属性信息以及障碍物的位置信息。
30、可选的,所述第一生成模块还包括:
31、第一获取子模块,用于获取直角弯道的路径信息;
32、第一确定子模块,用于根据所述车辆宽度信息和所述目标轨迹规划规则,确定所述车辆入弯时与外侧的第一距离;
33、第二确定子模块,用于根据所述车辆宽度信息和所述目标轨迹规划规则,确定所述车辆出弯时与内侧的第二距离;
34、第一生成子模块,用于根据所述第一距离,所述第二距离以及所述路径信息,生成所述车辆的目标行驶轨迹。
35、可选的,所述第一调整模块还包括:
36、第三确定子模块,用于根据所述车辆与道路两侧的距离信息和所述目标行驶轨迹,确定所述车辆的横向调整位移;
37、第四确定子模块,用于根据所述车辆与道路弯道顶点的距离信息与所述目标行驶轨迹,确定所述车辆的垂直调整位移;
38、第一调整子模块,用于根据所述横向调整位移和所述垂直调整位移调整所述车辆的位姿。
39、可选的,所述通行控制装置还包括:
40、第二获取模块,用于通过摄像头获取第一道路信息;
41、第三获取模块,用于通过雷达获取第二道路信息;
42、第二生成模块,用于将所述第一道路信息和所述第二道路信息进行比对,生成道路信息的误差值;
43、第一发送模块,用于若所述误差值大于目标阈值,则发送报警信息;
44、第三生成模块,用于若所述误差值小于目标阈值,则将所述第一道路信息和所述第二道路信息融合计算,生成当前道路信息。
45、第四获取模块,用于获取所述车辆的导航路径信息;
46、第一确定模块,用于根据所述导航路径信息确定所述车辆处于直角弯道的道路场景。
47、根据本技术实施例的第三方面,提供一种电子设备,包括:
48、处理器;
49、用于存储所述处理器可执行指令的存储器;
50、其中,所述处理器被配置为执行所述指令,以实现如第一方面所述的通行控制方法。
51、根据本技术实施例的第四方面,提供一种计算机可读存储介质,当所述存储介质中的指令由移动终端的处理器执行时,使得移动终端能够执行如本技术第一方面所述的通行控制方法。
52、根据本技术实施例的第五方面,提供一种车辆,包括本技术第二方面所述的通行控制装置。
53、本技术的实施例提供的技术方案可以包括以下有益效果:
54、本发明通过在检测到车辆处于直角弯道的道路场景下,获取当前道路信息和目标轨迹规划规则,根据道路信息和目标轨迹规划规则生成目标行驶轨迹,根据目标行驶轨迹调整车辆的位姿,以使车辆通过直角弯道。本发明通过检测当前道路的场景,在确定是直角弯道的道路场景会调用目标轨迹规划规则,以确保后续针对在特殊场景(过直角弯)下的车辆做出合理调整,根据道路信息和目标轨迹规划规则生成目标行驶轨迹,根据目标行驶轨迹调整车辆的位姿,通过规划合理的行驶局部路径,使车辆尽可能一次性通过弯道,一方面避免车辆与周边障碍物发生碰撞,另一方面提高泊车通行效率。
55、应当理解的是,以上的一般描述和后文的细节描述仅是示例性和解释性的,并不能限制本技术。
- 还没有人留言评论。精彩留言会获得点赞!