一种基于寻迹传感器的麦克纳姆轮小车停靠姿态调整方法
本发明涉及自动化小车控制,特别涉及一种基于寻迹传感器的麦克纳姆轮小车停靠姿态调整方法。
背景技术:
1、随着人们在各个场合下对麦克纳姆轮小车的需求量逐渐增大,移动灵活方便的麦克纳姆轮小车越来越被人们所需要,尤其在工作环境狭小的仓储物流行业和制造业上,麦克纳姆轮小车不仅具有前后直行的功能,还具有左右直行的能力,但由于麦克纳姆轮小车在直行时的姿态控制能力较差,当小车在指定工况处停靠时车身会出现倾斜的现象,这可能会导致物料或小车损坏,甚至可能会造成工作人员受伤,由此可见仅装配麦克纳姆轮的小车并不能满足自动化作业时准确性和安全性的需求。
2、综上可知,现有麦克纳姆轮小车在实际使用上显然存在不便与缺陷,因此,目前急需一种安全准确的麦克纳姆轮小车停靠姿态调整方法。
技术实现思路
1、针对上述麦克纳姆轮小车的缺陷,本发明的目的在于提供一种基于寻迹传感器的麦克纳姆轮小车停靠姿态调整方法,来达到小车在指定工况处停车时车身姿态不会倾斜的目的,以此来增加小车作业时的准确率和安全性,推动麦克纳姆轮小车在自动化作业上的发展。
2、为实现上述目的,本发明提供一种基于麦克纳姆轮的小车停靠姿态调整方法,该方法包括以下步骤:
3、步骤一:构建由寻迹传感器组成的麦克纳姆轮小车车身姿态检测模型,用于检测在某一具体工况处停车时车身姿态是否发生倾斜;
4、步骤二:构建麦克纳姆轮小车车身姿态矫正运动模型;
5、步骤三:进行麦克纳姆轮小车车身矫正控制。
6、根据本发明的基于寻迹传感器的麦克纳姆轮小车停靠姿态调整方法,所述步骤一中麦克纳姆轮小车车身姿态检测模型包括:车身姿态检测系统和小车控制系统,车身姿态检测系统由五个寻迹传感器组成,五个寻迹传感器的摆放位置为小车横中心线的2个端点处和竖中心线的2个端点处以及小车的中心处,控制系统接收车身姿态检测系统输出的数字信号判断小车停靠时车身是否存在倾斜,其构建方式如下,根据小车的移动方向,可分为四种情况讨论。
7、第一种:作业的某一时刻,麦克纳姆轮小车向左移动到达某一“竖”型摆放的固定寻迹带,在左移过程中通过安装在小车中心的寻迹传感器使小车在寻迹带处停止,通过安装在小车的竖中心线前后两端的寻迹传感器对车身姿态进行检测,三个寻迹传感器在同一直线上,其检测方式为三个寻迹传感器在小车左移过程中会持续输出数字信号,当传感器检测到寻迹带时,传感器输出数字信号“1”,未检测到寻迹带时,传感器输出数字信号“0”,当小车中心的传感器检测到寻迹带时,小车停车,当小车停止移动时,若小车的竖中心线前端的传感器已检测到寻迹带,小车的竖中心线后端的传感器未检测到寻迹带,则车身左倾;若小车的竖中心线前端的传感器未检测到寻迹带,小车的竖中心线后端的传感器已检测到寻迹带,则车身右倾。
8、第二种:作业的某一时刻,麦克纳姆轮小车向右移动到达某一“竖”型摆放的固定寻迹带,当小车中心的传感器检测到寻迹带时,小车停车,当小车停止移动时,若小车的竖中心线前端的传感器已检测到寻迹带,小车的竖中心线后端的传感器未检测到寻迹带,则车身右倾,反之,则车身左倾。
9、第三种:作业的某一时刻,麦克纳姆轮小车向前移动到达某一“横”型摆放的固定寻迹带,在前移过程中通过安装在小车中心的寻迹传感器使小车在寻迹带处停车,通过安装在小车的横中心线左右两端的寻迹传感器对车身姿态进行检测,三个寻迹传感器在同一直线上,当小车中心的传感器检测到寻迹带时,小车停车,当小车停止移动时,若小车的横中心线左端的传感器已检测到寻迹带,小车的横中心线右端的传感器未检测到寻迹带,则车身右倾,反之,则车身左倾。
10、第四种:作业的某一时刻,麦克纳姆轮小车向后移动到达某一“横”型摆放的固定寻迹带,小车后移的过程中,当小车中心的传感器检测到寻迹带时,小车停车,当小车停止移动时,若小车的横中心线左端的传感器已检测到寻迹带,小车的横中心线右端的传感器未检测到寻迹带,则车身左倾,反之,则车身右倾。
11、根据本发明的基于寻迹传感器的麦克纳姆轮小车停靠姿态调整方法,所述步骤二中麦克纳姆轮小车车身姿态矫正运动模型构建如下:
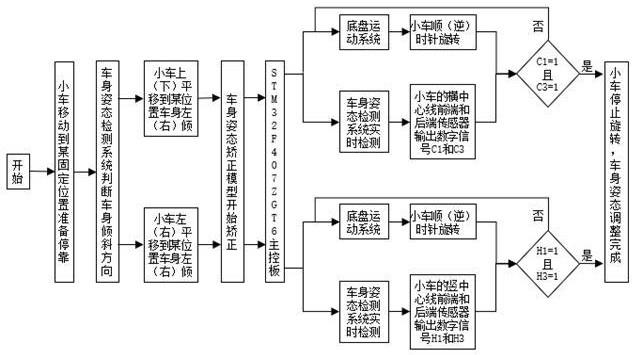
12、在作业的某一时刻,麦克纳姆轮小车前进、后退、左移或右移到达某一固定寻迹带,由车身姿态检测模型检测到车身存在倾斜,小车开始姿态调整,姿态矫正模型包括:由5个寻迹传感器组成的车身姿态检测系统、由麦克纳姆轮和电机组成的底盘运动系统和由stm32控制板构成的控制系统;控制系统控制车身姿态检测系统和底盘运动系统,当车身存在左倾或右倾时,控制系统控制底盘运动系统顺时针或逆时针旋转调整车身,同时控制系统控制车身姿态检测系统实时检测车身是否调正,从而完成麦克纳姆轮小车的车身调整。
13、根据本发明的基于寻迹传感器的麦克纳姆轮小车停靠姿态调整方法,所述步骤三中麦克纳姆轮小车车身矫正控制步骤如下,根据小车的移动方向和车身倾斜情况,可分为四种情况讨论。
14、第一种:作业的某一时刻,麦克纳姆轮小车向左或向右移动到达某一“竖”型摆放的固定寻迹带时,若车身姿态检测模型检测到车身存在左倾,则车身姿态矫正运动模型开始车身矫正:
15、第一步:控制系统控制底盘运动系统顺时针旋转,同时控制系统接收小车的竖中心线的前端和后端的传感器输出的数字信号;
16、第二步:小车控制系统判断小车的竖中心线前端和后端的传感器输出的数字信号是否同时为“1”;
17、第三步:若小车的竖中心线前端和后端的传感器输出的数字信号同时为“1”,则说明车身已经调正,则控制系统控制底盘运动系统停止顺时针旋转,同时控制系统不再接收传感器输出的数字信号,若小车的竖中心线前端和后端的传感器输出的数字信号不同时为“1”,则重复第一步和第二步,直到传感器输出的数字信号同时为“1”时停止矫正。
18、第二种:作业的某一时刻,麦克纳姆轮小车向左或向右移动到达某一“竖”型摆放的固定寻迹带时,若车身姿态检测模型检测到车身存在右倾,车身姿态矫正运动模型开始车身矫正,车身矫正步骤与小车向左或向右移动到达某一固定寻迹带时车身存在左倾的矫正步骤相同,只需将第一步中控制系统控制底盘运动系统顺时针旋转改为控制其逆时针旋转即可。
19、第三种:作业的某一时刻,麦克纳姆轮小车向前进或向后退到达某一“横”型摆放的固定寻迹带时,若车身姿态检测模型检测到车身存在左倾,车身姿态矫正运动模型开始车身矫正:
20、第一步:控制系统控制底盘运动系统顺时针旋转,同时控制系统接收小车的横中心线左端和右端的传感器输出的数字信号;
21、第二步:小车控制系统判断小车的横中心线左端和右端的传感器输出的数字信号是否同时为“1”;
22、第三步:若小车的横中心线左端和右端的传感器输出的数字信号同时为“1”,则说明车身调正,控制系统控制底盘运动系统停止顺时针旋转,同时控制系统不在接收传感器输出的数字信号,若小车的横中心线左端和右端的传感器输出的数字信号不同时为“1”,则重复第一步和第二步,直到小车的横中心线左端和右端的传感器输出的数字信号同时为“1”停止矫正。
23、第四种:作业的某一时刻,麦克纳姆轮小车向前进或向后退到达某一“横”型摆放的固定寻迹带时,若车身姿态检测系统检测到车身存在右倾,姿态矫正运动模型开始车身矫正,车身矫正步骤与小车向前进或向后退到达某一固定寻迹带时车身存在左倾的矫正步骤相同,只需将第一步中控制系统控制底盘运动系统顺时针旋转改为控制其逆时针旋转即刻。
24、本发明提出了一种基于寻迹传感器的麦克纳姆轮小车停靠姿态调整方法,提高了麦克纳姆轮小车在左右移动和上下移动到某一固定位置处停靠时的准确性,增加了麦克纳姆轮小车在完成具体工况时的准确性和安全性,使麦克纳姆轮小车在仓储物流和加工制造等自动化行业的使用得到了更有效的控制。
- 还没有人留言评论。精彩留言会获得点赞!