自适应巡航的避让方法及装置、存储介质、电子装置与流程
本发明涉及车辆控制领域,具体而言,涉及一种自适应巡航的避让方法及装置、存储介质、电子装置。
背景技术:
1、相关技术中,随时汽车智能化时代的到来,软件定义汽车早已成为行业共识;l2智能驾驶已经成为了汽车行业标配,那么提供一种稳定可靠,良好的人机交互的l2产品十分有必要。
2、相关技术中,集成式自适应巡航系统智慧偏移控制主要聚焦于本车与前后车辆,当本车的两侧遇到让人感觉具有压迫性的场景,如大货车等,容易给驾驶员造成惊吓,导致安全事故发生。
3、针对相关技术中存在的上述问题,暂未发现高效且准确的解决方案。
技术实现思路
1、本发明提供了一种自适应巡航的避让方法及装置、存储介质、电子装置,以解决相关技术中的技术问题。
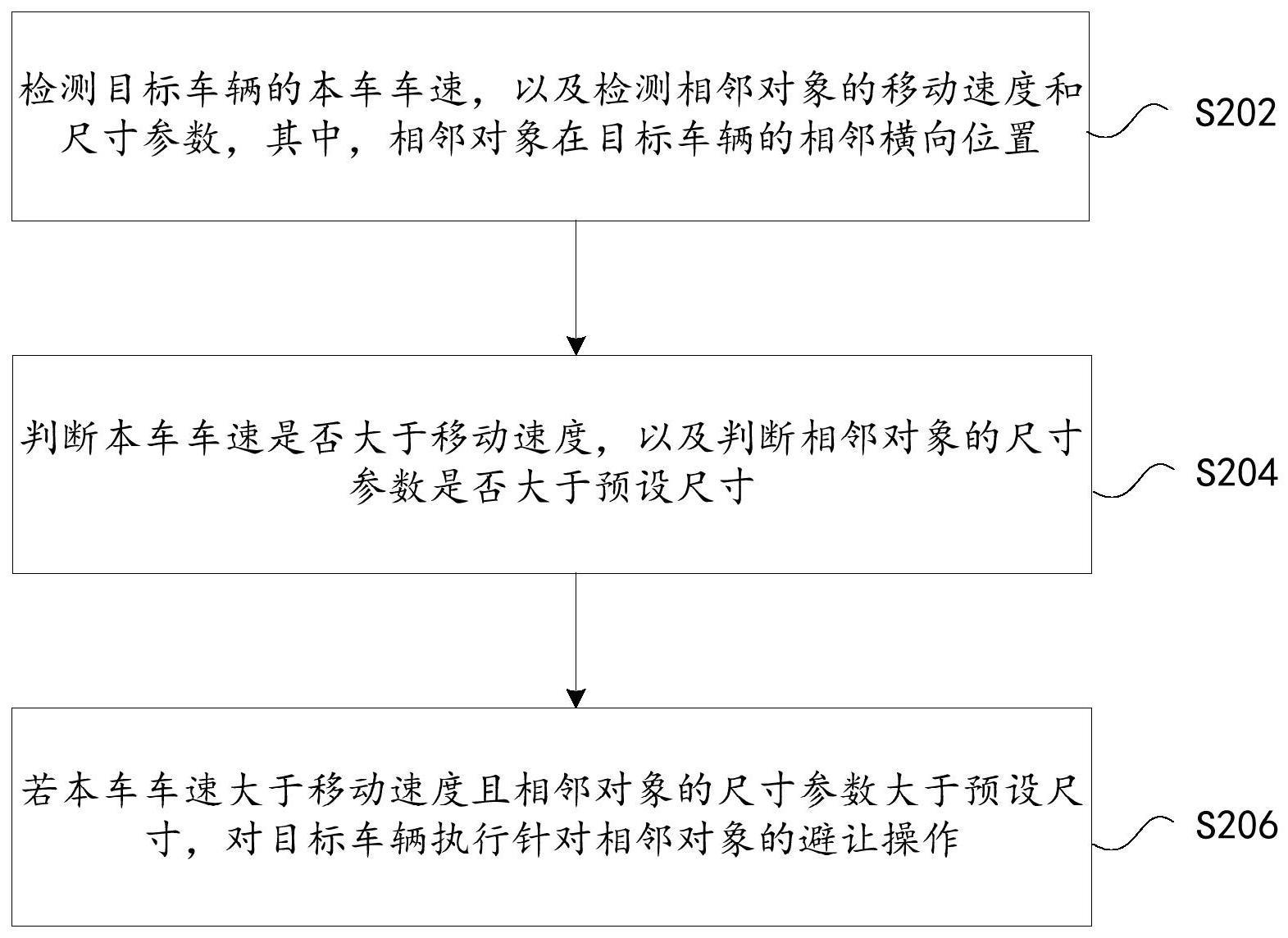
2、根据本发明的一个实施例,提供了一种自适应巡航的避让方法,包括:检测目标车辆的本车车速,以及检测相邻对象的移动速度和尺寸参数,其中,所述相邻对象在所述目标车辆的相邻横向位置;判断所述本车车速是否大于所述移动速度,以及判断所述相邻对象的尺寸参数是否大于预设尺寸;若所述本车车速大于所述移动速度且所述相邻对象的尺寸参数大于预设尺寸,对所述目标车辆执行针对所述相邻对象的避让操作。
3、进一步,对所述目标车辆执行针对所述相邻对象的避让操作包括:确定所述相邻对象相对所述目标车辆的分布方位;若所述相邻对象分布在所述目标车辆的单侧,对所述目标车辆执行针对所述相邻对象的第一避让操作;若多个所述相邻对象同时分布在所述目标车辆的两侧,对所述目标车辆执行针对多个所述相邻对象的第二避让操作。
4、进一步,对所述目标车辆执行针对所述相邻对象的第一避让操作包括:生成车道偏移指令和第一避让提示信息,其中,所述车道偏移指令用于指示向所述相邻对象的相反方向偏移;向所述目标车辆的转向系统下发所述偏移指令,在所述目标车辆的仪表盘上显示所述第一避让提示信息。
5、进一步,生成车道偏移指令包括:计算所述目标车辆所在车道的车道中心线到所述相邻对象的相反方向的道路边缘线的横向距离;判断所述横向距离是否大于预设距离;若所述横向距离大于预设距离,获取所述目标车辆的车身尺寸;根据所述车身尺寸计算所述目标车辆在当前车道的偏移量,根据所述相邻对象相对所述目标车辆的分布方位确定偏移方向,其中,所述车身尺寸与所述偏移量呈负相关;基于所述偏移量和偏移方向生成车道偏移指令。
6、进一步,对所述目标车辆执行针对所述相邻对象的第二避让操作包括:生成车辆变速指令和第二避让提示信息;向所述目标车辆的制动系统下发所述车辆变速指令,在所述目标车辆的仪表盘上显示所述第二避让提示信息。
7、进一步,生成车辆变速指令包括:检测所述目标车辆与相邻前方车辆的第一车距,以及检测所述目标车辆与相邻后方车辆的第二车距,其中,所述相邻前方车辆和所述相邻后方车辆与所述目标车辆在同一车道;比较所述第一车距与所述第二车距,且判断所述第一车距和所述第二车距是否大于预设安全车距;若所述第一车距大于所述第二车距且所述第一车距大于预设安全车距,生成车辆加速指令;若所述第一车距小于或等于所述第二车距且所述第二车距大于预设安全车距,生成车辆减速指令。
8、进一步,在判断所述本车车速是否大于所述移动速度,以及判断所述相邻对象的尺寸参数是否大于预设尺寸之后,所述方法还包括:若所述本车车速小于或等于所述移动速度,禁止对所述目标车辆执行针对所述相邻对象的避让操作。
9、根据本发明的另一个实施例,提供了一种自适应巡航的避让装置,包括:检测模块,用于检测目标车辆的本车车速,以及检测相邻对象的移动速度和尺寸参数,其中,所述相邻对象在所述目标车辆的相邻横向位置;判断模块,用于判断所述本车车速是否大于所述移动速度,以及判断所述相邻对象的尺寸参数是否大于预设尺寸;避让模块,用于若所述本车车速大于所述移动速度且所述相邻对象的尺寸参数大于预设尺寸,对所述目标车辆执行针对所述相邻对象的避让操作。
10、进一步,所述避让模块包括:确定单元,用于确定所述相邻对象相对所述目标车辆的分布方位;避让单元,用于若所述相邻对象分布在所述目标车辆的单侧,对所述目标车辆执行针对所述相邻对象的第一避让操作;若多个所述相邻对象同时分布在所述目标车辆的两侧,对所述目标车辆执行针对多个所述相邻对象的第二避让操作。
11、进一步,所述避让单元包括:第一生成子单元,用于生成车道偏移指令和第一避让提示信息,其中,所述车道偏移指令用于指示向所述相邻对象的相反方向偏移;第一控制子单元,用于向所述目标车辆的转向系统下发所述偏移指令,在所述目标车辆的仪表盘上显示所述第一避让提示信息。
12、进一步,所述第一生成子单元还用于:计算所述目标车辆所在车道的车道中心线到所述相邻对象的相反方向的道路边缘线的横向距离;判断所述横向距离是否大于预设距离;若所述横向距离大于预设距离,获取所述目标车辆的车身尺寸;根据所述车身尺寸计算所述目标车辆在当前车道的偏移量,根据所述相邻对象相对所述目标车辆的分布方位确定偏移方向,其中,所述车身尺寸与所述偏移量呈负相关;基于所述偏移量和偏移方向生成车道偏移指令。
13、进一步,所述避让单元包括:第二生成子单元,用于生成车辆变速指令和第二避让提示信息;第二控制子单元,用于向所述目标车辆的制动系统下发所述车辆变速指令,在所述目标车辆的仪表盘上显示所述第二避让提示信息。
14、进一步,所述第二生成子单元还用于:检测所述目标车辆与相邻前方车辆的第一车距,以及检测所述目标车辆与相邻后方车辆的第二车距,其中,所述相邻前方车辆和所述相邻后方车辆与所述目标车辆在同一车道;比较所述第一车距与所述第二车距,且判断所述第一车距和所述第二车距是否大于预设安全车距;若所述第一车距大于所述第二车距且所述第一车距大于预设安全车距,生成车辆加速指令;若所述第一车距小于或等于所述第二车距且所述第二车距大于预设安全车距,生成车辆减速指令。
15、进一步,所述装置还包括:禁止模块,用于在所述判断模块判断所述本车车速是否大于所述移动速度,以及判断所述相邻对象的尺寸参数是否大于预设尺寸之后,若所述本车车速小于或等于所述移动速度,禁止对所述目标车辆执行针对所述相邻对象的避让操作。
16、根据本技术实施例的另一方面,还提供了一种存储介质,该存储介质包括存储的程序,程序运行时执行上述的步骤。
17、根据本技术实施例的另一方面,还提供了一种电子设备,包括处理器、通信接口、存储器和通信总线,其中,处理器,通信接口,存储器通过通信总线完成相互间的通信;其中:存储器,用于存放计算机程序;处理器,用于通过运行存储器上所存放的程序来执行上述方法中的步骤。
18、本技术实施例还提供了一种包含指令的计算机程序产品,当其在计算机上运行时,使得计算机执行上述方法中的步骤。
19、本发明的有益效果:
20、1、本发明通过执行针对相邻对象的避让操作,避免了相邻横向位置的干扰无对车辆造成的干扰,解决了相关技术中相邻横向位置的对象对车辆驾驶员造成压迫性干扰的技术问题,提高了车辆自适应巡航过程的安全性,避免给驾驶员造成惊吓,导致安全事故发生,减少了安全隐患。
21、2、本发明通过判断前后车辆的车距,并选择加速避让或减速避让,防止两侧的相邻车辆对目标车辆造成安全压迫,同时避免因为避让造成新的安全隐患。
- 还没有人留言评论。精彩留言会获得点赞!