一种高速公路自动驾驶车辆制动间距控制方法及系统与流程
本发明属于自动驾驶,具体涉及一种高速公路自动驾驶车辆制动间距控制方法及系统。
背景技术:
1、高速公路作为目前长途驾车的最主要方式,是等级最高的公路,其设计速度大,道路线性设计指标较高,车辆运行速度也较大。在发生紧急情况时,驾驶员决策时间较短,若处理不当,则易引发严重交通事故,从而导致巨大生命财产损失。因此,高速公路交通安全问题是交通安全问题的重中之重。影响高速公路行车安全的因素众多,道路线形指标是最重要的因素之一。其中,行车视距作为最基本的道路线形设计指标,对行车安全有着重要的影响。在高速公路线形设计中,保证足够的行车视距是保障行车安全性和舒适度的重要举措。若视距不良,则有可能令驾驶员无法做出正确决策,而造成交通事故。
2、近年来,随着智能化、信息化技术的不断提高,汽车自动驾驶技术正不断发展并逐渐成为未来的主要发展方向。且由于自动驾驶技术及国家政策的制定,未来自动驾驶车辆将以一定的比例逐渐渗入现有的交通流中,形成一定渗透率的异质交通流。自动驾驶车辆的加入会使车辆的反应和制动性能相比于传统人工驾驶车辆产生大的差异,停车视距作为保障行车安全的重要道路线形设计指标,有必要对异质交通流与停车视距的适应性展开研究,并以停车视距为依据控制自动驾驶车辆制动间距,用以保障高速公路的交通安全。
3、针对停车视距的研究,国内研究者主要聚焦在停车视距模型理论的改进以及道路线形的检验方法。有学者通过重新划分汽车制动过程建立停车视距计算模型,也有部分学者通过运行速度和制动减速度对停车视距进行修正。以上研究针对停车视距进行了较为深入的研究,认为停车视距计算主要包括反应距离和制动距离两部分,并得到了广泛的认可,但均集中于人工驾驶车辆,没有针对自动驾驶车辆进行停车视距研究。此外,在停车视距中涉及到的重要计算“参数—反应时间”研究中,目前的计算均通过经验值进行取值,缺少定量化计算。
4、车辆在行驶过程中根据跟驰模型与前导车辆以一定的间距跟驰行驶,目前在自动驾驶的跟驰间距中主要利用acc跟驰模型进行控制。其中,在acc跟驰模型中对安全停车间距参数仍参照经验值,并未针对前导车发生状态突变情况这一特殊场景进行分析,且车辆跟驰行驶时,车辆之间需保持一定的制动安全间距。在实际车辆行驶时,自动驾驶车辆作为跟随车辆,若按停车视距进行与前车制动安全间距控制会过于保守。因此,急需研发一种能够适应自动驾驶环境下的制动间距控制方法及其系统。
技术实现思路
1、本发明的目的在于克服现有技术之缺陷,本发明提高了一种高速公路自动驾驶车辆制动间距控制方法及系统,该制动间距控制系统通过计算异质交通流下自动驾驶车辆停车视距,并以此为自动驾驶在异质交通流运行过程中遇到前导车辆驾驶行为突变提供解决方案。
2、为了到达预期效果,本发明采用了以下技术方案:
3、本发明公开了一种高速公路自动驾驶车辆制动间距控制方法,包括:
4、s1.根据高速公路道路交通场景相关数据,构建制动模型;
5、s2.根据制动模型,计算自动驾驶车辆的停车视距;
6、s3.根据自动驾驶车辆的停车视距,进行制动间距控制。
7、进一步地,所述高速公路道路交通场景相关数据包括车道的方向、数量和各车道的每小时交通量。
8、进一步地,所述s2具体包括:
9、s2.1.构建跟驰场景;
10、s2.2.在跟驰场景里标定自动驾驶车辆的反应时间;
11、s2.3.根据反应时间计算反应距离;
12、s2.4.根据反应距离计算停车视距。
13、进一步地,所述跟驰场景包括跟驰车跟驰前导车,所述跟驰车包括自动驾驶车辆和自然人驾驶车辆,所述前导车包括自动驾驶车辆和自然人驾驶车辆。
14、进一步地,所述s2.2具体包括:基于跟驰模型,通过交通流仿真的形式,采集实验参数,在实验参数中筛选特定编号的车辆数据作为跟驰车数据,根据跟驰车数据确定其前导车和前导车所在车道,提取跟驰车和前导车的相对速度数据以及跟驰车的加速度数据进行相关性分析,当互相关系数最大时,则跟驰车和前导车的相对速度/跟驰车的加速度=自动驾驶车辆的反应时间。
15、进一步地,所述采集实验参数的规则为:在采集数据期间,跟驰车与前导车均处于同一车道,且一直保持跟驰与被跟驰的关系,跟驰车跟驰前导车的最短时间大于第一预设值,跟驰车跟驰前导车的数据记录条数大于第二预设值。
16、进一步地,所述停车视距=反应距离+制动距离。
17、进一步地,所述制动距离=制动力上升阶段距离+全制动阶段距离。
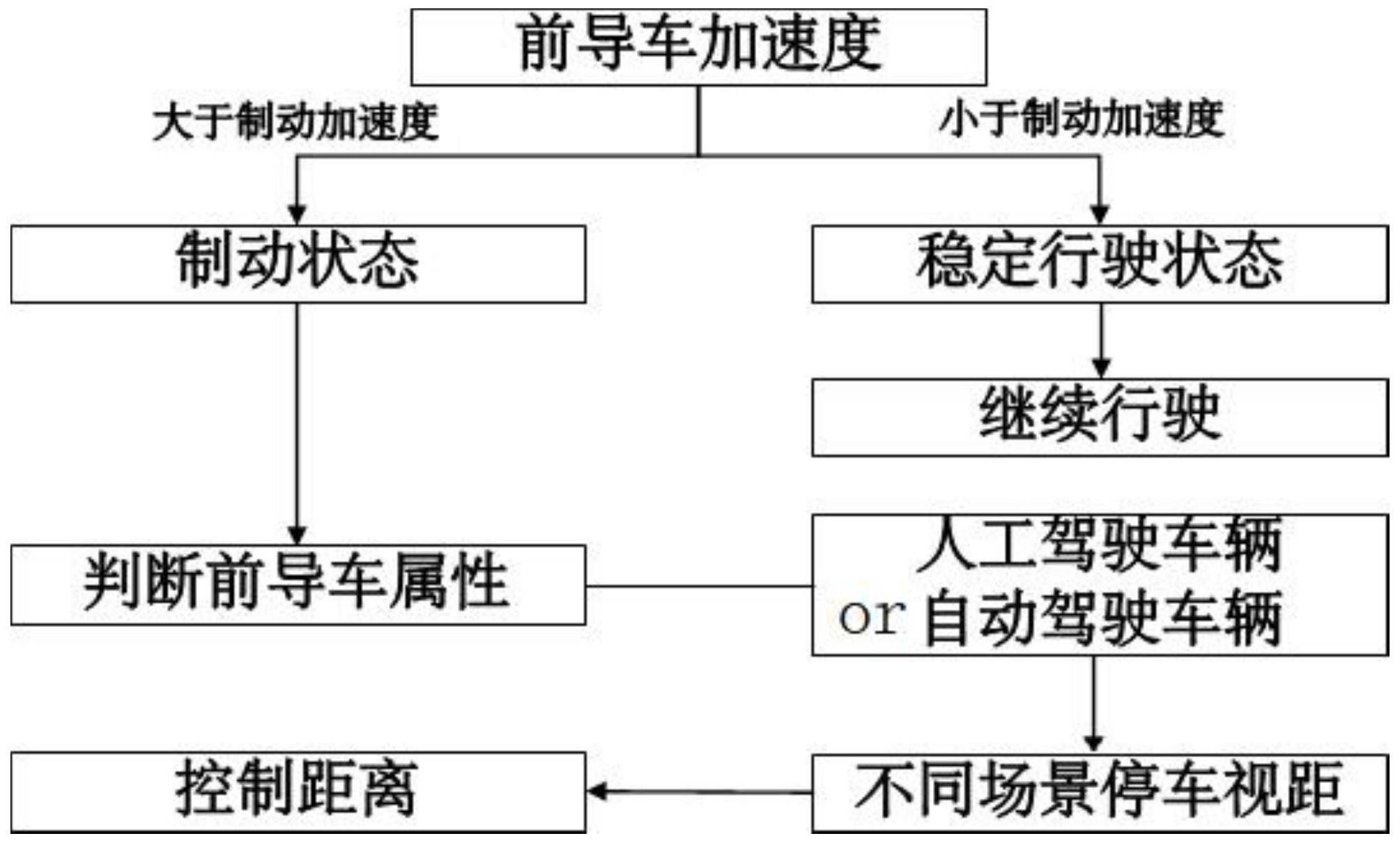
18、进一步地,所述s3具体包括:
19、跟驰车监测前导车的加速度;
20、当前导车的加速度小于跟驰车的制动加速度时,跟驰车继续行驶;
21、当前导车的加速度大于跟驰车的制动加速度时,跟驰车根据前导车的车辆属性与前导车保持相应的安全制动间距。
22、本发明还公开了一种高速公路自动驾驶车辆制动间距控制系统,包括:
23、采集模块,用于采集高速公路道路交通场景相关数据;
24、制动间距控制模块,用于根据高速公路道路交通场景相关数据,构建制动模型;根据制动模型,计算自动驾驶车辆的停车视距;根据自动驾驶车辆的停车视距,进行制动间距控制。
25、与现有技术相比,本发明的有益效果是:本发明公开了一种高速公路自动驾驶车辆制动间距控制方法及系统,该方法包括:s1.根据高速公路道路交通场景相关数据,构建制动模型;s2.根据制动模型,计算自动驾驶车辆的停车视距;s3.根据自动驾驶车辆的停车视距,进行制动间距控制。本发明基于krause和acc两种跟驰模型,构建高速公路自动驾驶车辆制动间距控制,能够更加准确、定量地确定自动驾驶车辆停车视距要求。本发明主要应用于高速公路行车安全控制场景,综合自动驾驶实车试验政策的限制以及实车试验带来的不确定附加因素,本发明考虑自动驾驶车辆的引入对现有交通流的影响,分析车辆不同跟驰组合情况,并根据仿真跟驰数据进行反应时间的标定,构建自动驾驶车辆和人工驾驶车辆的制动模型,计算自动驾驶车辆停车视距,并根据自动驾驶停车视距进行制动间距控制。相较于现有研究中仅考虑以人工驾驶车辆为主体的停车视距指标值,跟驰模型中对安全停车间距参数参照经验值,且缺乏针对前导车发生状态突变情况这一特殊场景的研究分析,本发明综合自动驾驶实车试验政策的限制以及实车试验带来的不确定附加因素,考虑自动驾驶车辆的引入对现有交通流的影响,分析车辆不同跟驰组合情况,并根据仿真跟驰数据进行反应时间的标定,构建自动驾驶车辆和人工驾驶车辆的制动模型,计算自动驾驶车辆停车视距,并根据自动驾驶停车视距进行制动间距控制。在停车视距能够保证交通安全的情况下,较大地提高了交通效率。随着自动驾驶技术不断发展成熟,自动驾驶车辆的量产和实际商用将会成为新型高速公路发展的必然结果。依托高速公路领域的技术先进性,本发明可以为目前自动驾驶技术对高速公路关键设计指标影响研究提供技术指引,同时为未来自动驾驶技术全面推广后,应用于新型高速公路路线线形指标设计提供技术支撑,具有广阔的推广应用前景。
- 还没有人留言评论。精彩留言会获得点赞!