一种雷达清洗控制方法、装置、设备及存储介质与流程
本技术涉及车辆控制,具体涉及一种雷达清洗控制方法、装置、设备及存储介质。
背景技术:
1、目前,在智能驾驶领域,通常会在车头设置激光雷达,以探测交通工具前方的障碍物,
2、但是,激光雷达是基于光学原理进行工作的,所以激光雷达对于其透光盖板的干净程度有很高的要求,当透光盖板出现脏污(比如飞虫、污垢)时,激光雷达将不能正常工作。
技术实现思路
1、本技术提供一种雷达清洗控制方法、装置、设备及存储介质,以至少解决相关技术中由于激光雷达对于其透光盖板的干净程度有很高的要求,因此当透光盖板出现脏污时,激光雷达将不能正常工作的技术问题。本技术的技术方案如下:
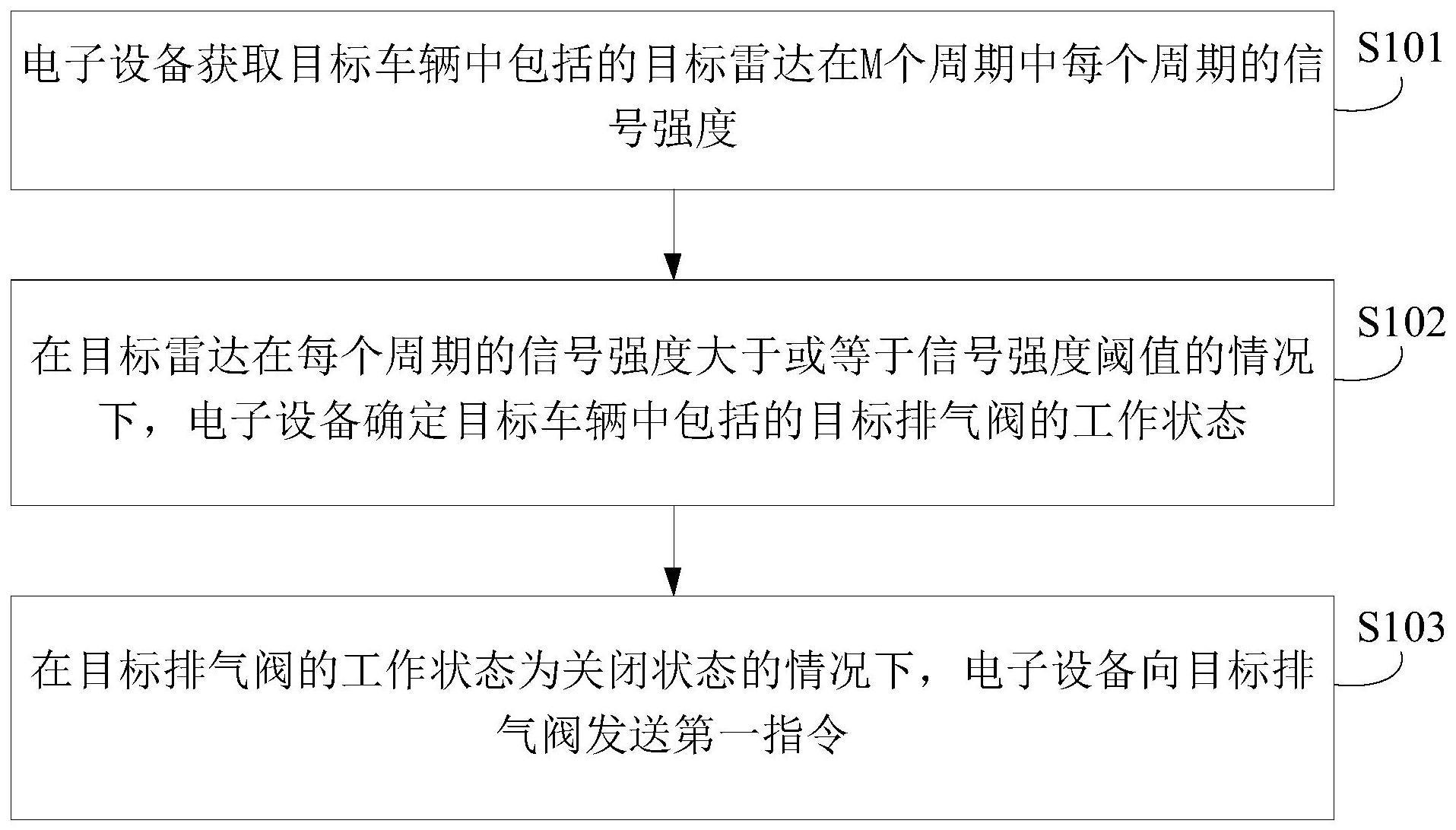
2、根据本技术涉及的第一方面,提供一种雷达清洗控制方法,包括:获取目标车辆中包括的目标雷达在m个周期中每个周期的信号强度,其中,该目标雷达在一个周期的信号强度为该目标雷达中包括的目标接收装置在该周期接收到的信号强度,m为大于或等于5的整数;在该目标雷达在该每个周期的信号强度大于或等于信号强度阈值的情况下,确定该目标车辆中包括的目标排气阀的工作状态,该目标排气阀用于控制该目标车辆中包括的目标储气罐内的高压气体的排放;在该目标排气阀的工作状态为关闭状态的情况下,向该目标排气阀发送第一指令,该第一指令用于指示将该目标排气阀的工作状态更新为开启状态,以使得该目标储气罐内的高压气体清洗该目标雷达。
3、根据上述技术手段,本技术可以获取该目标车辆中包括的该目标雷达在m个周期中每个周期的信号强度,在该目标雷达在每个周期的信号强度大于或等于信号强度阈值的情况下,说明该目标雷达可能存在脏污(即该目标雷达不能正常工作),此时电子设备确定该目标车辆中包括的该目标排气阀的工作状态,在该目标排气阀的工作状态为关闭状态的情况下,说明该目标储气罐中的高压气体并未排出,此时电子设备向目标排气阀发送第一指令,以使得该目标排气阀的工作状态更新为开启状态,此时该目标储气罐中的高压气体将排出并有效地清洗该目标雷达,进而快速地、有效地使该目标雷达能够正常工作。
4、在一种可能的实施方式中,上述方法还包括:在该目标雷达在该每个周期的信号强度小于该信号强度阈值的情况下,确定该目标排气阀的工作状态;在该目标排气阀的工作状态为开启状态的情况下,向该目标排气阀发送第二指令,该第二指令用于指示将目标排气阀的工作状态更新为关闭状态。
5、根据上述技术手段,本技术可以在该目标雷达在每个周期的信号强度小于信号强度阈值的情况下,说明该目标雷达未存在脏污(即该目标雷达可以正常工作),此时电子设备可以确定该目标车辆中包括的该目标排气阀的工作状态,在该目标排气阀的工作状态为开启状态的情况下,说明该目标储气罐中的高压气体正在排出并清洗该目标雷达,而此时该目标雷达未存在脏污,此时电子设备可以向目标排气阀发送第二指令,以使得该目标排气阀的工作状态更新为关闭状态,可以快速地、有效地将该目标储气罐中的高压气体停止排出,即快速地、有效地停止清洗该目标雷达,使该目标雷达进行正常工作。
6、在一种可能的实施方式中,上述方法还包括:基于该目标雷达的位置信息以及该目标储气罐的位置信息,确定目标管路,该目标管路用于连接该目标储气罐与该目标雷达;在该目标排气阀的工作状态为开启状态的情况下,基于该目标管路以及该目标储气罐内的高压气体控制该目标雷达的清洗过程。
7、根据上述技术手段,本技术可以基于该目标雷达的位置信息以及该目标储气罐的位置信息准确地确定出该目标管路,然后在该目标排气阀的工作状态为开启状态的情况下,说明该目标储气罐中的高压气体正在排出,此时电子设备可以准确地、有效地基于该目标管路以及该目标储气罐内的高压气体控制该目标雷达的清洗过程。
8、在一种可能的实施方式中,上述方法还包括:在该目标排气阀的工作状态为开启状态的情况下,显示预设提示信息,该预设提示信息用于提示该目标雷达处于清洗状态。
9、根据上述技术手段,本技术可以在该目标排气阀的工作状态为开启状态的情况下,说明该目标储气罐中的高压气体正在排出并清洗该目标雷达,此时电子设备可以显示预设提示信息,从而准确地、有效地提示该目标雷达处于清洗状态。
10、根据本技术提供的第二方面,提供一种雷达清洗控制装置,包括获取单元、确定单元以及控制单元。
11、在一种可能的实施方式中,上述获取单元,用于获取目标车辆中包括的目标雷达在m个周期中每个周期的信号强度,其中,该目标雷达在一个周期的信号强度为该目标雷达中包括的目标接收装置在该周期接收到的信号强度,m为大于或等于5的整数;
12、上述确定单元,用于在该目标雷达在该每个周期的信号强度大于或等于信号强度阈值的情况下,确定该目标车辆中包括的目标排气阀的工作状态,该目标排气阀用于控制该目标车辆中包括的目标储气罐内的高压气体的排放;
13、上述控制单元,用于在该目标排气阀的工作状态为关闭状态的情况下,向该目标排气阀发送第一指令,该第一指令用于指示将该目标排气阀的工作状态更新为开启状态,以使得该目标储气罐内的高压气体清洗该目标雷达。
14、在一种可能的实施方式中,上述确定单元,还用于在该目标雷达在该每个周期的信号强度小于该信号强度阈值的情况下,确定该目标排气阀的工作状态;
15、上述控制单元,还用于在该目标排气阀的工作状态为开启状态的情况下,向该目标排气阀发送第二指令,该第二指令用于指示将目标排气阀的工作状态更新为关闭状态。
16、在一种可能的实施方式中,上述确定单元,还用于基于该目标雷达的位置信息以及该目标储气罐的位置信息,确定目标管路,该目标管路用于连接该目标储气罐与该目标雷达;
17、上述控制单元,还用于在该目标排气阀的工作状态为开启状态的情况下,基于该目标管路以及该目标储气罐内的高压气体控制该目标雷达的清洗过程。
18、在一种可能的实施方式中,上述雷达清洗控制装置还包括显示单元,
19、上述显示单元,用于在该目标排气阀的工作状态为开启状态的情况下,显示预设提示信息,该预设提示信息用于提示该目标雷达处于清洗状态。
20、根据本技术提供的第三方面,提供一种电子设备,包括:处理器;用于存储处理器可执行指令的存储器;其中,处理器被配置为执行指令,以实现上述第一方面及其任一种可能的实施方式的方法。
21、根据本技术提供的第四方面,提供一种计算机可读存储介质,当计算机可读存储介质中的指令由电子设备的处理器执行时,使得电子设备能够执行上述第一方面中及其任一种可能的实施方式的方法。
22、根据本技术提供的第五方面,提供一种车辆,包括:如上述第三方面的电子设备。
23、由此,本技术的上述技术特征具有以下有益效果:
24、(1)可以获取该目标车辆中包括的该目标雷达在m个周期中每个周期的信号强度,在该目标雷达在每个周期的信号强度大于或等于信号强度阈值的情况下,说明该目标雷达可能存在脏污(即该目标雷达不能正常工作),此时电子设备确定该目标车辆中包括的该目标排气阀的工作状态,在该目标排气阀的工作状态为关闭状态的情况下,说明该目标储气罐中的高压气体并未排出,此时电子设备向目标排气阀发送第一指令,以使得该目标排气阀的工作状态更新为开启状态,此时该目标储气罐中的高压气体将排出并有效地清洗该目标雷达,进而快速地、有效地使该目标雷达能够正常工作。
25、(2)在该目标雷达在每个周期的信号强度小于信号强度阈值的情况下,说明该目标雷达未存在脏污(即该目标雷达可以正常工作),此时电子设备可以确定该目标车辆中包括的该目标排气阀的工作状态,在该目标排气阀的工作状态为开启状态的情况下,说明该目标储气罐中的高压气体正在排出并清洗该目标雷达,而此时该目标雷达未存在脏污,此时电子设备可以向目标排气阀发送第二指令,以使得该目标排气阀的工作状态更新为关闭状态,可以快速地、有效地将该目标储气罐中的高压气体停止排出,即快速地、有效地停止清洗该目标雷达,使该目标雷达进行正常工作。
26、(3)可以基于该目标雷达的位置信息以及该目标储气罐的位置信息准确地确定出该目标管路,然后在该目标排气阀的工作状态为开启状态的情况下,说明该目标储气罐中的高压气体正在排出,此时电子设备可以准确地、有效地基于该目标管路以及该目标储气罐内的高压气体控制该目标雷达的清洗过程。
27、(4)在该目标排气阀的工作状态为开启状态的情况下,说明该目标储气罐中的高压气体正在排出并清洗该目标雷达,此时电子设备可以显示预设提示信息,从而准确地、有效地提示该目标雷达处于清洗状态。
28、需要说明的是,第二方面至第五方面中的任一种实现方式所带来的技术效果可参见第一方面中对应实现方式所带来的技术效果,此处不再赘述。
29、应当理解的是,以上的一般描述和后文的细节描述仅是示例性和解释性的,并不能限制本技术。
- 还没有人留言评论。精彩留言会获得点赞!