防止车辆过度转向的控制方法及装置与流程
本发明涉及车辆控制,具体涉及一种防止车辆过度转向的控制方法及装置。
背景技术:
1、目前,车的操纵稳定性直接关系到汽车行驶安全,汽车的操纵稳定性包括方向稳定性,其中,在汽车的三种转弯特性:合理转向、转向不足和转向过度,合理转向,也即是理想的转弯,即汽车按照驾驶员给定的角度进行转向,不发生偏移。但是合理转向在遇到突发状况的时候,仅仅依靠驾驶员很难实现;故而在实际转弯过程中多为不足转向和过度转向。
2、并且实际转弯过程中,如果出现了不足转向,驾驶员可以通过继续转动方向盘进行修正,问题不大;而出现过度转向时,就很难通过转动方向盘来恢复正常行驶,特别是在高速行驶时,易失去稳定,十分危险。如何设计一种能够防止车辆过度转向控制的方案成为本领域技术人员亟待解决的技术问题。
技术实现思路
1、针对所述缺陷,本发明实施例公开了一种防止车辆过度转向的控制方法,其大大降低车辆在转向过程中出现过度转向的情况,提升行车安全性。
2、本发明实施例第一方面公开了防止车辆过度转向的控制方法,包括:
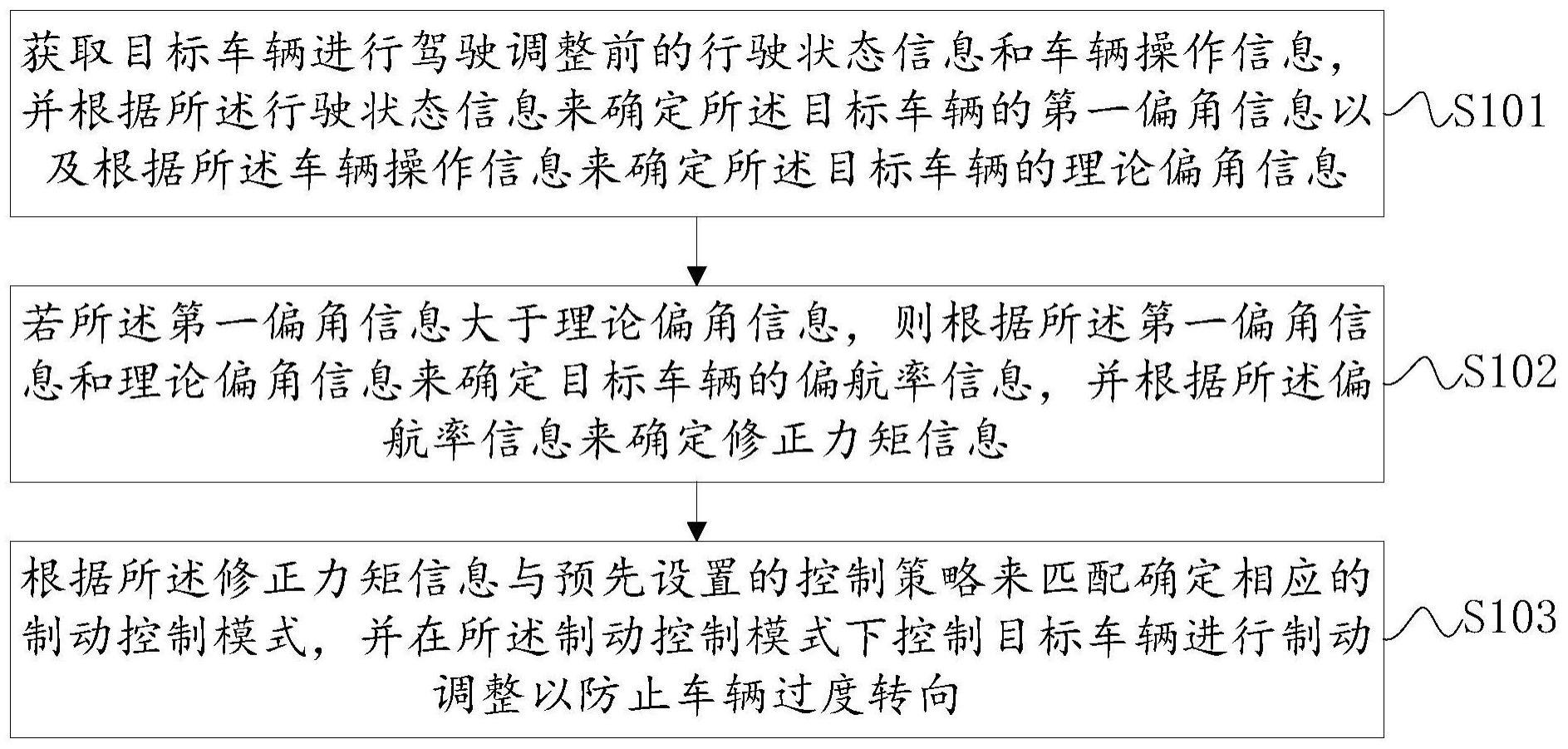
3、获取目标车辆进行驾驶调整前的行驶状态信息和车辆操作信息,并根据所述行驶状态信息来确定所述目标车辆的第一偏角信息以及根据所述车辆操作信息来确定所述目标车辆的理论偏角信息;
4、若所述第一偏角信息大于理论偏角信息,则根据所述第一偏角信息和理论偏角信息来确定目标车辆的偏航率信息,并根据所述偏航率信息来确定修正力矩信息;
5、根据所述修正力矩信息与预先设置的控制策略来匹配确定相应的制动控制模式,并在所述制动控制模式下控制目标车辆进行制动调整以防止车辆过度转向。
6、作为一种可选的实施方式,在本发明实施例第一方面中,所述制动控制模式包括第一制动控制模式和第二制动控制模式;
7、所述根据所述修正力矩信息与预先设置的控制策略来匹配确定相应的制动控制模式,并在所述制动控制模式下控制目标车辆进行制动调整以防止车辆过度转向,包括:
8、根据所述修正力矩信息与预先设置的控制策略来匹配确定当前制动控制模式为第一制动控制模式,在所述第一制动控制模式下控制目标车辆的转向外侧的后制动器工作以对目标车辆进行制动调整;
9、根据所述修正力矩信息与预先设置的控制策略来匹配确定当前制动控制模式为第二制动控制模式,在所述第二制动控制模式下根据第一制动力矩控制目标车辆的转向外侧的后制动器工作以对目标车轮进行制动调整直至所述目标车轮进入滑移调节状态;
10、并根据所述修正力矩信息与第一制动力矩来确定第二制动力矩,并根据所述第二制动力矩控制目标车辆的转向外侧的前制动器工作以对目标车轮进行制动调整。
11、作为一种可选的实施方式,在本发明实施例第一方面中,在所述根据所述修正力矩信息与预先设置的控制策略来匹配确定相应的制动控制模式,并在所述制动控制模式下控制目标车辆进行制动调整以防止车辆过度转向之后,还包括:
12、实时获取所述目标车辆在制动调整后下一时刻的车辆移动状态;
13、根据所述车辆移动状态来确定是否启动abs系统;
14、若确定不开启abs,则不对当前目标车辆的制动状态进行调整;
15、若确定开启abs,则根据所述车辆移动状态来对第一制动力矩或者第二制动力矩进行数据更新并基于更新后的制动力矩来对目标车辆进行制动操作。
16、作为一种可选的实施方式,在本发明实施例第一方面中,所述车辆移动状态包括车辆移动速度和车轮滑移率;所述实时获取所述目标车辆在制动调整后下一时刻的车辆移动状态,包括:
17、根据开始制动时目标车辆的移动速度、轮速数据和车轮制动数据来确定下一时刻的目标车辆的移动速度;
18、根据下一时刻的行进速度来确定所述目标车辆的车轮滑移率;
19、所述根据所述车辆移动状态来确定是否启动abs系统,包括:
20、判断相应时刻的车轮滑移率是否大于预设滑移率;
21、若相应时刻的车轮滑移率大于设定车轮滑移率,则确定开启abs系统。
22、作为一种可选的实施方式,在本发明实施例第一方面中,在所述获取目标车辆进行驾驶调整前的行驶状态信息之前,还包括:
23、通过设置于车身前侧的摄像头来获取路面状态信息以及与前车的距离参数;所述路面状态信息包括路面积水状态、路面沙土状态和路面正常状态;
24、根据所述路面状态信息来确定目标车辆的车轮与地面之间的力矩变化信息;
25、获取目标车辆中各个轮胎的当前胎压数据;并根据所述当前胎压数据、力矩变化信息以及预先配置的胎压-力矩映射表来确定相应轮胎的目标胎压数据;
26、根据所述目标胎压数据来对相应车轮轮胎的胎压进行调整操作。
27、所述根据所述偏航率信息来确定修正力矩信息,包括:
28、根据所述路面状态信息、与前车的距离参数以及偏航率信息来确定修正力矩信息。
29、作为一种可选的实施方式,在本发明实施例第一方面中,所述获取目标车辆进行驾驶调整前的行驶状态信息和车辆操作信息,并根据所述行驶状态信息来确定所述目标车辆的第一偏角信息以及根据所述车辆操作信息来确定所述目标车辆的理论偏角信息,包括:
30、通过设置于目标车辆处的横摆角速度传感器来获取目标车辆进行驾驶调整前的横摆速率信息;
31、通过设置于目标车辆轮胎处的轮速传感器来获取所述目标车辆进行驾驶调整前的轮速信息;
32、根据所述轮速信息和所述横摆速率信息来确定所述目标车辆的第一偏角信息;
33、通过设置于目标车辆方向控制装置处的扭矩传感器来获取目标车辆进行驾驶调整前的车辆操作信息,所述车辆操作信息包括转动角度信息和转动方向信息;
34、根据所述转动角度信息和轮速信息来计算得到所述目标车辆的理论横摆速率;
35、根据所述理论横摆速率和轮速信息来确定理论偏角信息。
36、作为一种可选的实施方式,在本发明实施例第一方面中,所述根据所述转动角度信息和轮速信息来计算得到所述目标车辆的理论横摆速率,包括:
37、获取目标车辆的第一驱动轮的第一轮速信息以及第二驱动轮的第二轮速信息;
38、将所述转动角度信息、第一轮速信息和第二轮速信息输入至预先构建的横摆计算公式中来计算得到所述目标车辆的理论横摆速率;所述横摆计算公式包括:yaw=(wf1-wf2)*r/(a*cos(k));
39、其中,yaw为理论横摆速率,wf1为第一轮速信息,wf2为第二轮速信息,r为车轮轴距,k为车轮转角。
40、本发明实施例第二方面公开一种防止车辆过度转向的控制方法,包括:
41、获取模块:用于获取目标车辆进行驾驶调整前的行驶状态信息和车辆操作信息,并根据所述行驶状态信息来确定所述目标车辆的第一偏角信息以及根据所述车辆操作信息来确定所述目标车辆的理论偏角信息;
42、确定模块:用于若所述第一偏角信息大于理论偏角信息,则根据所述第一偏角信息和理论偏角信息来确定目标车辆的偏航率信息,并根据所述偏航率信息来确定修正力矩信息;
43、制动模块:用于根据所述修正力矩信息与预先设置的控制策略来匹配确定相应的制动控制模式,并在所述制动控制模式下控制目标车辆进行制动调整以防止车辆过度转向。
44、本发明实施例第三方面公开一种电子设备,包括:存储有可执行程序代码的存储器;与所述存储器耦合的处理器;所述处理器调用所述存储器中存储的所述可执行程序代码,用于执行本发明实施例第一方面公开的防止车辆过度转向的控制方法。
45、本发明实施例第四方面公开一种计算机可读存储介质,其存储计算机程序,其中,所述计算机程序使得计算机执行本发明实施例第一方面公开的防止车辆过度转向的控制方法。
46、与现有技术相比,本发明实施例具有以下有益效果:
47、本发明实施例中的方案通过对转向过程中车辆变化数据进行实时检测比对来确定转动过程中是否出现过度转向,当确定过度转向后,通过采用多种模式来进行精细化调节控制使得车辆行驶更加平稳,进而保证车辆安全。
- 还没有人留言评论。精彩留言会获得点赞!