基于标精地图的自动巡航泊车方法及系统与流程
本发明涉及自动巡航泊车领域,尤其涉及的是一种基于标精地图的自动巡航泊车方法及系统。
背景技术:
1、随着人们对车辆驾驶的需求越来越大,自动巡航泊车技术逐步发展,现有技术中,自动巡航泊车系统主要有两个方向,一个是场端提供地图信息以及车辆在停车场内的位置,并为汽车提供路径规划,一个是车端建立并存储停车场的高精地图信息,在自动巡航泊车过程中由车端进行地图定位。现有技术存在的问题在于,由场端提供地图的方式需要对停车场有一定的要求,需要架设专门的巡航路线,并且需要额外的车辆定位系统,对场端有较高的维护成本,无法大规模铺设;由车端建立并维护停车场高精地图,地图内需要含有详细车道、障碍物、车位信息,车辆进入地图范围内时需要对地图进行厘米级精度的定位并根据高精地图中的路线进行规划,对车端定位的精度有较高要求。因此现有技术依赖于场端或者车端的高精地图定位系统,不利于节约自动巡航泊车的成本,不利于大规模铺设自动巡航泊车系统。
2、因此,现有技术还有待改进和发展。
技术实现思路
1、本发明的主要目的在于提供一种基于标精地图的自动巡航泊车方法及系统,旨在解决现有技术依赖于场端或者车端的高精地图定位系统,不利于节约自动巡航泊车的成本,不利于大规模铺设自动巡航泊车系统。
2、为了实现所述目的,本发明第一方面提供一种基于标精地图的自动巡航泊车方法,其中,所述基于标精地图的自动巡航泊车方法包括:
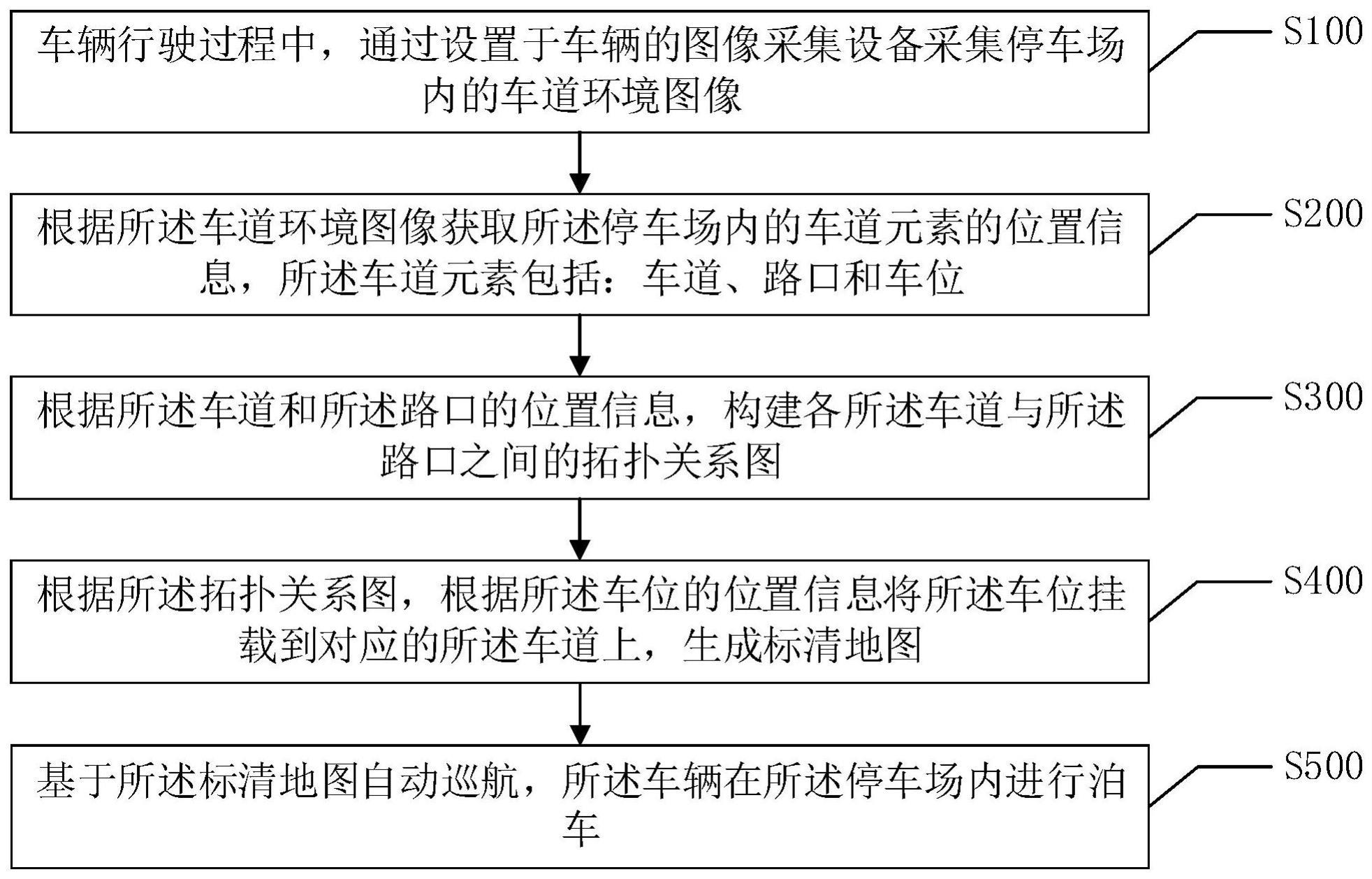
3、车辆行驶过程中,通过设置于车辆的图像采集设备采集停车场内的车道环境图像;
4、根据所述车道环境图像获取所述停车场内的车道元素的位置信息,所述车道元素包括:车道、路口和车位;
5、根据所述车道和所述路口的位置信息,构建各所述车道与所述路口之间的拓扑关系图;
6、根据所述拓扑关系图,根据所述车位的位置信息将所述车位挂载到对应的所述车道上,生成标精地图;
7、基于所述标精地图自动巡航,所述车辆在所述停车场内进行泊车。
8、可选的,所述根据所述车道和所述路口的位置信息,构建各所述车道与所述路口之间的拓扑关系图,包括:
9、所述车辆行驶进入停车场入口,通过图像采集设备持续采集停车场内的车道环境图像,对所述车道环境图像进行图像识别,获得当前感知车道线;
10、所述车辆沿所述当前感知车道线直行,当图像识别到路口时,将所述停车场入口到所述路口之间的所述感知车道线作为当前车道;
11、所述车辆沿下一感知车道线直行,当图像识别到下一路口时,将所述下一路口到所述上一个路口之间的所述下一感知车道线作为下一车道,并控制所述车辆持续行驶并采集车道环境图像,直至识别到停车场出口;
12、获取所述停车场入口和所述停车场出口之间的所述车道和所述路口的位置信息,构建各所述车道与所述路口之间的拓扑关系图。
13、可选的,所述根据所述拓扑关系图,根据所述车位的位置信息将所述车位挂载到对应的所述车道上,生成标精地图,包括:
14、在车辆行驶过程中,对实时采集的所述车道环境图像进行图像识别,获得车位线;
15、根据所述车位线的位置信息判断所述车位线对应的所述车位是否设置于所述车辆行驶的所述当前车道;
16、在所述车位线对应的所述车位设置于所述车辆行驶的所述当前车道的情况下,根据所述车位的位置信息将所述车位挂载至所述拓扑关系图中对应的所述车道上,生成标精地图。
17、可选的,所述根据所述车位线的位置信息判断所述车位线对应的所述车位是否设置于所述车辆行驶的所述当前车道,包括:
18、若所述车位线对应的所述车位设置于所述车辆行驶的所述当前车道,判定该车位所在的车道可泊,则根据所述车位的位置信息、停车场信息和所述拓扑关系图,将所述车位挂载至所述拓扑关系图中对应的所述车道上;
19、若所述车位线对应的所述车位未设置于所述车辆行驶的所述当前车道,判定该车位所在的车道不可泊,则在此次挂载过程中将所述车道舍弃。
20、可选的,所述根据所述拓扑关系图,根据所述车位的位置信息将所述车位挂载到对应的所述车道上,生成标精地图之后,所述方法还包括:
21、预设标精地图,所述预设标精地图为已知车道环境对应的标精地图;
22、通过所述车辆的图像采集设备采集车道环境图像,根据所述车道环境图像和预设场景描述子进行比对,判断所述车辆是否行驶在预设标精地图中的车道上,其中,所述场景描述子为通过神经网络学习得到所述预设标精地图中车道环境的特征信息;
23、若所述车辆行驶在预设标精地图中的车道上,则根据所述车道环境图像确定是否对所述预设标清图像的车位进行更新;
24、若所述车辆未行驶在的预设标精地图的车道上,则基于所述车道环境图像生成新的标精地图。
25、可选的,所述基于所述标精地图自动巡航,所属车辆在所述停车场内进行泊车,包括:
26、所述车辆基于所述标精地图进行巡航;
27、根据所述标精地图上的车位,通过感应实时判断所述车位是否空闲;
28、若所述车位空闲,则将所述车位作为目标车位进行泊入;
29、若所述车位不空闲,则根据所述标精地图上的其他车位及所述其他车位的位置信息进行巡航,直至所述车辆在巡航过程中确定目标车位进行泊入。
30、本发明第二方面提供一种基于标精地图的自动巡航泊车系统,所述系统包括:
31、图像采集模块,用于车辆行驶过程中,通过设置于车辆的图像采集设备采集停车场内的车道环境图像;
32、车道元素获取模块,用于根据所述车道环境图像获取所述停车场内的车道元素的位置信息,所述车道元素包括:车道、路口和车位;
33、拓扑关系图构建模块,用于根据所述车道和所述路口的位置信息,构建各所述车道与所述路口之间的拓扑关系图;
34、标精地图生成模块,用于根据所述拓扑关系图,根据所述车位的位置信息将所述车位挂载到对应的所述车道上,生成标精地图;
35、自动巡航泊车模块,用于基于所述标精地图自动巡航,所述车辆在所述停车场内进行泊车。
36、可选的,拓扑关系图构建模块包括:
37、当前感知车道线获取单元,用于所述车辆行驶进入停车场入口,通过图像采集设备持续采集停车场内的车道环境图像,对所述车道环境图像进行图像识别,获得当前感知车道线;
38、当前车道获取单元,用于所述车辆沿所述当前感知车道线直行,当图像识别到路口时,将所述停车场入口到所述路口之间的所述感知车道线作为当前车道;
39、下一车道获取单元,用于所述车辆沿下一感知车道线直行,当图像识别到下一路口时,将所述下一路口到所述上一个路口之间的所述下一感知车道线作为下一车道,并控制所述车辆持续行驶并采集车道环境图像,直至识别到停车场出口;
40、构建关系图单元,用于获取所述停车场入口和所述停车场出口之间的所述车道和所述路口的位置信息,构建各所述车道与所述路口之间的拓扑关系图。
41、本发明第三方面提供一种智能终端,所述智能终端包括存储器、处理器以及存储在所述存储器上并可在所述处理器上运行的基于标精地图的自动巡航泊车程序,所述基于标精地图的自动巡航泊车程序被所述处理器执行时实现所述任意一种基于标精地图的自动巡航泊车方法的步骤。
42、由上可见,本发明中,车辆行驶过程中,通过设置于车辆的图像采集设备采集停车场内的车道环境图像;根据所述车道环境图像获取所述停车场内的车道元素的位置信息,所述车道元素包括:车道、路口和车位;根据所述车道和所述路口的位置信息,构建各所述车道与所述路口之间的拓扑关系图;根据所述拓扑关系图,根据所述车位的位置信息将所述车位挂载到对应的所述车道上,生成标精地图;基于所述标精地图自动巡航,所述车辆在所述停车场内进行泊车。
43、与现有技术中相比,本发明提供一种基于标精地图的自动巡航泊车方法,通过车道环境图像获取所述停车场内的车道元素的位置信息,所述车道元素包括:车道、路口和车位,构建所述车道和所述路口之间的拓扑关系图,根据拓扑关系图将车位的位置信息挂载到对应的所述车道上生成标精地图,所述车辆基于所述标精地图在停车场内进行自动泊车,通过根据拓扑关系生成标精地图的方法,不依赖于场端或者车端的高精地图定位系统,有利于节约自动巡航泊车的成本,有利于大规模铺设自动巡航泊车系统。
- 还没有人留言评论。精彩留言会获得点赞!