基于智能轮胎多传感器信息融合的四轮驱动汽车路面附着系数估计方法及装置
本发明涉及一种路面附着系数估计的方法,尤其涉及一种面向四轮驱动汽车动力学控制研究的路面附着系数估计方法及装置。
背景技术:
1、近年来,随着轮胎技术的进步、信息技术的发展以及智能技术的兴起,智能轮胎系统开始逐渐走进人们的视线,中内外学者针对智能轮胎系统的设计与开发做了大量的研究。智能轮胎技术能够将轮胎与路面的相互作用信息第一时间反馈到汽车的控制系统,对汽车的行驶安全性、经济性以及舒适性等起着至关重要的作用。路面附着系数是用来描述轮胎与路面之间能够产生的最大相互作用力,直接影响着汽车的驱动性、制动性以及操纵稳定性。准确而快速地识别路面附着系数不但能优化智能汽车主动安全控制系统的控制效果,而且能提高智能驾驶技术中决策和规划的工作性能,对汽车动力学状态观测和稳定性控制起着至关重要的作用。
2、路面附着系数识别的本质是通过观测轮胎力、轮胎滑移率、侧偏角等参数的变化,直接或间接获得轮胎-路面之间的附着系数,现有路面附着系数分为基于试验(experiment-based)和基于模型(model-based)的识别方法。基于试验的路面附着估计依赖于高精度的视觉传感器和位置传感器,在轮胎力很小的情况下可以有效识别,但是成本高昂,试验难度高。与试验方法相比,基于轮胎模型和动力学模型的估计方法仅利用车辆已有低成本传感器对路面附着条件变化引起整车及车轮动态响应进行观察并推测,即可完成对附着系数的实时观测。基于模型的路面附着系数估计方法虽然能准确估计当前车辆位置的路面附着系数,但是需要考虑道路对轮胎的激励而且存在一定的滞后性,基于智能轮胎的路面附着系数估计,优点是估计所需的硬件相对容易满足,并已安装到大多汽车上且识别精度很高。然而高滑移情况下,由于滑移现象增加轮胎振动水平使所提出的基于智能轮胎振动的方法不适用。如何将两种方法进行结合,充分发挥各自的优点实现更大滑移范围内的路面附着系数的准确估计,对于提升主动安全控制系统的性能,提高车辆的行驶安全性具有十分重要的理论研究意义。
技术实现思路
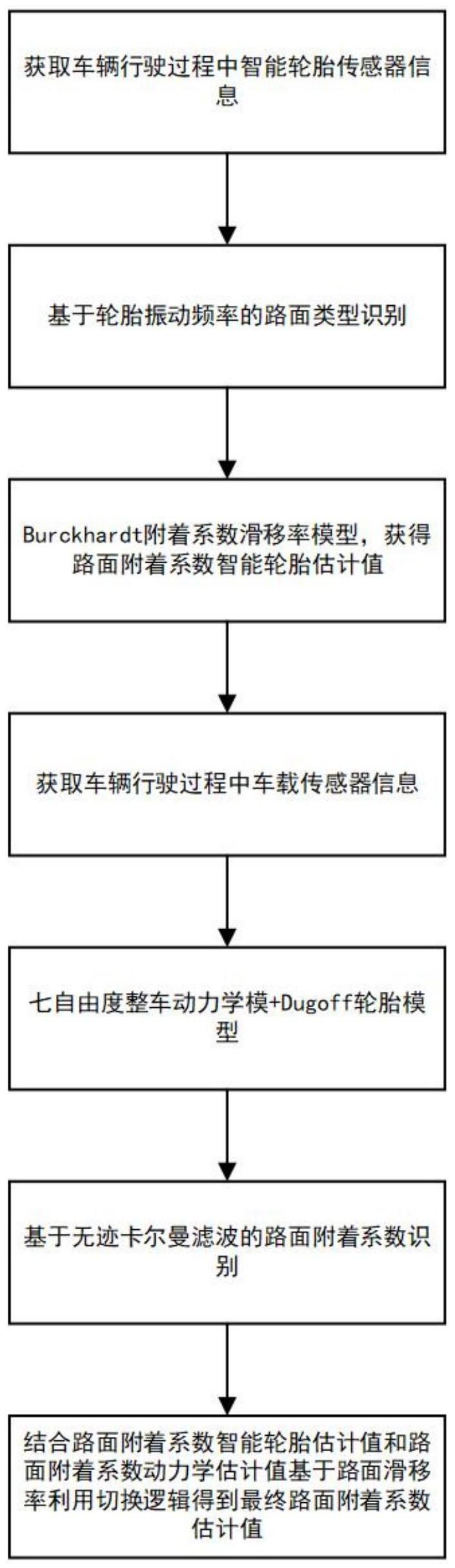
1、本发明要解决现有路面附着系数估计算法存在的估计误差和滞后性问题,将基于智能轮胎的路面类型识别方法和基于车辆动力学响应信息的路面附着系数估计方法结合,提出一种基于智能轮胎多源传感器信息融合的路面附着系数估计方法,这种方法可以准确而快速地识别路面附着系数;首先借助智能轮胎的周向加速度信号功率谱密度的变化提供利用轮胎振动模式来表征路面类型,根据burckhardt典型路面附着系数和滑移率模型,可以获得不同路面类型下的峰值路面附着系数的经验值;其次在高滑移率情况下,由于滑移现象增加轮胎振动水平使所提出的基于智能轮胎振动的方法不适用,根据采集得到的车辆动力学响应信息,采用无迹卡尔曼滤波器估计方法得到路面附着系数估计值;然后设置适当的路面滑移率的阈值,设计一种基于融合的切换逻辑来实现更大范围激励内路面附着系数的估计。
2、为了解决上述技术问题,本发明是采用如下技术方案实现的:
3、首先借助智能轮胎的周向加速度信号功率谱密度的变化提供利用轮胎振动模式来表征路面类型,根据burckhardt典型路面附着系数和滑移率模型,可以获得不同路面类型下的峰值路面附着系数的经验值;其次在高滑移率情况下,由于滑移现象增加轮胎振动水平使所提出的基于智能轮胎振动的方法不适用,根据采集得到的车辆动力学响应信息,采用无迹卡尔曼滤波器估计方法得到路面附着系数估计值;然后设置适当的路面滑移率的阈值,设计一种的切换逻辑来实现更大范围激励内路面附着系数的估计,融合输出最终的路面附着系数估计值,本发明估计方法的具体步骤如下:
4、步骤1、基于智能轮胎的路面附着系数估计算法
5、首先在预定区域内提取轮胎的周向加速度信号;然后将提取到的信号通过预定频带的带通滤波器计算预定频带内的振动水平,根据振动水平估计路面类型;最后由burckhardt典型路面附着系数和滑移率模型,可以获得不同路面类型下的峰值路面附着系数的经验值。
6、基于智能轮胎的路面附着系数估计算法包括:检测行驶车辆轮胎的周向振动;将检测到的轮胎振动划分为接地前端振动域和接地后端振动域。与使用整个信号或使用接地后端域信号获得的功率谱密度相比,接地前端域信号的功率谱密度差异更大。所以只从接地前端域提取轮胎振动信号;将提取的信号通过预定频带的带通滤波器,其中预定义的频域是一个低频带(如10-500hz)和一个高频带(如600-2500hz)。获得只包含预定频带中的频率的轮胎振动时间序列波形;计算预定频带内的振动水平;并根据计算出的振动水平估计路面状况。
7、最后将智能轮胎在干燥路面上和潮湿路面上以不同的速度行驶,测量振动级别比(r)的变化,其中(r)为上述高频频带和低频频带振动级别的比值。由于轮胎在湿路面上行驶时,轮胎的打滑增加会导致轮胎振动级比(r)增加。从而可以设置适当的路面滑移率阈值来保证路面类型分类的精度。通过在自由滚动、牵引/制动和转向条件下对智能轮胎进行广泛的测试,研究轮胎负载、平移速度、变化的压力条件和路面粗糙度对轮胎振动的影响,为此,开发了一种模糊逻辑分类方法来实时对路面类型进行分类,基于给定路面条件下所有输入的相互依赖性以及它们对轮胎振动谱的影响,开发了一套规则来识别路面条件,如图3所示
8、路面类型直接反映路面的本质属性,与路面附着系数密切相关,根据burckhardtμ-s曲线,可以得到不同路面类型下的路面附着系数经验值。
9、burckhardtμ-s附着系数滑移率曲线模型,以下简称burckhardt模型,是一种广泛用于路面附着系数估计的轮胎路面模型。该模型认为路面附着系数主要有滑移率λ和一切其他的因素如速度和载荷等,描述路面附着系数μ随λ的变化关系。该模型拟合参数简单,具有较高的拟合精度,公式中用三个参数描述不同路面类型下的附着系数与滑移率的非线性关系具体表达式如下
10、
11、式中c1,c2,c3是拟合参数,μ是峰值路面附着系数,λ是轮胎滑移率。拟合参数随路面类型变化而变化。本发明选取了六种典型路面类型,分别为干沥青路面、湿沥青路面、干水泥路面、湿水泥路面、雪路面和冰路面,相关拟合参数如表1所示。
12、表1典型路面模型参数
13、
14、在高滑移条件下,需要一种更复杂的算法来区分由于踏面块移动效应引起的信号的高频内容,这使得所提出的模糊逻辑分类方法不适合在高滑移条件下的路面附着系数的估计。因此,提出使用基于动力学响应的方法来估计高滑移条件下的路面附着系数。
15、步骤2、基于无迹卡尔曼滤波的路面附着系数估计
16、2.1七自由度整车动力学模型
17、考虑到模型精度和计算量,本发明采用图4所示的七自由度整车动力学模型,该车辆模型除了车身运动变化外,对车辆的动力来源也进行了建模,考虑了四个车轮的滚动自由度,充分地考虑车辆各种平面运动的形式。本发明中基于ukf(unscented kalmanfilter)的路面附着系数估计算法将采用七自由度车辆模型模拟车辆车身的三个运动自由度和四个车轮的滚动自由度,来描述汽车的平面运动。
18、整车纵向运动、横向运动和横摆运动的微分方程如式(2-1)、(2-2)和(2-3)所示:
19、
20、
21、
22、式中,m表示整车质量。下标fl、fr、rl和rr分别表示前左轮、前右轮、后左轮和后右轮。fx.i和fy.i为对应车轮的纵向力和侧向力,其中i∈{fl,fr,rl,rr}。u、v和分别为质心纵向速度、侧向速度和横摆角,a、b、l和w分别是质心离前轴距离、质心离后轴距离、轴距和轮距。δ为前轮转角,αfl、αfr、αrl和αrr分别为四轮的侧偏角。iv为车辆绕z轴转动惯量。
23、四个车轮的滚动运动方程如式(2-4)所示
24、
25、式中,iw为车轮绕车轴的转动惯量,ωi是各车轮轮速,r为滚动半径,ti.p和ti.b分别是各车轮对应驱动力矩和制动力矩。
26、2.2dugoff轮胎模型
27、上述方程描述了车辆七个自由度的动力学特性,为了完成路面附着系数的估计,还需要对轮胎进行建模。dugoff轮胎模型是一种计算轮胎力的模型,该模型计算的轮胎力与路面附着系数直接关联,方便路面附着系数估计算法的设计,因此本发明使用该模型描述轮胎特性。
28、dugoff轮胎模型的纵向力fx和横向力fy表达公式如式(2-5)和(2-6)所示:
29、
30、
31、式中μ是路面附着系数,fz是对应轮胎垂直载荷。cx和cy分别对应轮胎纵向刚度和侧向刚度,是轮胎的自身属性,λ是纵向滑移率,α对应轮胎侧偏角。式中f(ln)是轮胎力修正项,ln描述轮胎非线性的特征参数,vx是车辆的纵向速度,计算式中的ε是车速影响因子,该项可以消除ln大于等于1时,轮胎力满足与刚度对应的线性关系,ln小于1时,则需要通过修正项对轮胎力进行修正。具体形式如下:
32、
33、
34、最后给出dugoff模型计算轮胎力所需要的各项轮胎垂直载荷、侧偏角公式和滑移率计算公式。四个车轮的垂直载荷分别为fz.fl,fz.fr,fz.rl,fz.rr,近似计算公式如下:
35、
36、
37、
38、
39、式中,hg、ax和ay分别表示质心离地高度、汽车纵向加速度和侧向加速度。
40、四轮的滑移率λi的计算公式如下:
41、
42、
43、
44、
45、四轮的侧偏角αi定义为
46、
47、
48、
49、
50、2.3基于ukf的路面附着系数估计
51、2.3.1建立路面附着系数估计模型
52、基于dugoff轮胎模型、七自由度车辆动力学模型和传感器测量信号,选取四个轮的附着系数作为估计系统的状态变量,记为:
53、x=[μfl μfr μrl μrr]t (2-21)
54、选取前轮转角作为估计系统的输入信号,记为μ=δf,其中δf为前轮转角;选取传感器测量得到的纵向加速度、侧向加速度和横摆角加速度作为估计系统的观测变量,记为:
55、
56、考虑实际工况中路面附着系数在短时间内可以看作慢变量,因此本发明估计系统可以表示成公式(2-23)的形式:
57、
58、式中估计系统的状态方程为f(x,u)=i4×4·x,i4×4为单位矩阵;w(t)为系统的过程噪声,v(t)为系统的测量噪声,且过程噪声和测量噪声均为均值为0的白噪声,两者互不相关,测量方程h(x,u)由式(2-1)、(2-2)和(2-3)组成,即:
59、ax=[(fx.fl+fx.fr)cosδ-(fy.fl+fy.fr)sinδ+fx.rl+fx.rr]/m (2-24)
60、ay=[(fx.fl+fx.fr)sinδ+(fy.fl+fy.fr)cosδ+fy.rl+fy.rr]/m (2-25)
61、
62、将公式(2-23)离散得到非线性差分方程的形式,见公式(2-27)
63、
64、式中,离散化后的状态方程为其中t为采样周期。wk和vk分别为过程噪声和测量噪声,均值和协方差矩阵满足:
65、
66、式中qk和rk代表过程噪声和测量噪声的均值,qk和rk代表过程噪声和测量噪声的协方差矩阵。
67、2.3.2通过无迹卡尔曼滤波器估计路面附着系数的流程如下:
68、(1)初始化,设置无迹卡尔曼滤波器的参数,包括估计系统的状态变量初始值为估计误差协方差矩阵的初始值为p0;
69、
70、(2)时间更新。sigma点的比例修正对称采样公式如下;
71、
72、式中,n为状态矢量的维数,χ为调节因子,ξi,k-1为第k-1时刻2n+1个sigma采样点,为第k-1时刻估计系统的状态估计值,pk-1为第k-1时刻的估计误差协方差矩阵。ξi,k-1对应的预测值γi,k|k-1
73、γi,k|k-1=f(ξi,k-1,uk-1) (2-31)
74、式中uk-1为k-1时刻的控制输入,第k-1时刻的先验状态估计值为
75、
76、式中wi为权重系数,计算公式为
77、
78、对应的先验协方差矩阵为
79、
80、(3)量测更新。根据先验状态预测值再次进行无迹变化以产生新的sigma点
81、
82、式中ξ′i,k-1为第k-1时刻根据先验状态估计值再次进行无迹变化产生新的2n+1个sigma采样点,为k-1时刻先验状态估计值,ξ′i,k-1对应的输出值ψi,k|k-1
83、ψi,k|k-1=h(ξ′i,k-1,uk-1) (2-36)
84、在k-1时刻,估计输出值输出值协方差矩阵pz,k和互协方差矩阵pxz,k的计算公式如下
85、
86、
87、
88、(4)滤波更新。卡尔曼滤波增益矩阵kk为
89、
90、
91、式中,ωk为k时刻的新息矢量,zk为量测矢量的测量值。后验状态估计值和协方差矩阵pk为:
92、
93、
94、当k值不断增加,迭代完成整个估计算法,得到车辆当前位置的四个车轮的路面附着系数估计值μd。
95、步骤3、基于切换逻辑实现更大范围激励内路面附着系数估计
96、3.1滑移率增大,轮胎振动频率增加
97、在高滑移条件下,提取智能轮胎预定区域周向加速度信号,周向加速度信号中由于轮胎滑移率增加引起轮胎振动水平增加,导致路面类型的分类精度大大降低,不满足实时分类获得路面附着系数的要求。
98、3.2动力学响应的局部弱可观测性
99、动力学响应的估计结果取决于被研究系统的可观测性。非线性系统的局部可观察性和弱可观察性的定义为:弱可观察性的重点是一个点是否能与其他点区分开来。局部可观察性要求在一定区域内的两个点能被迅速区分开来。局部弱可观察性的概念可以通过结合局部可观察性和弱可观察性得到。
100、用于设计动力学响应估计路面附着系数估计的轮胎模型是一个典型的非线性系统。如图5显示了某个轮胎模型在典型路面下的滑移率-路面附着系数曲线图
101、当滑移率很小时,对于任何路面类型的输入,对应的路面附着系数μs和μs附近的任何其他点的附着系数是相互不分的,因此μs在滑移率很小时可观测性不强。相反在滑移率较大时,对于任何路面类型的输入,对应的路面附着系数μs和μs附近的任何其他点的附着系数是可以相互区别的。因此,μ在滑移率较大时可观测性很强。因此,动力学响应的性能与系统的输入有关。当车辆处于小滑移情况下,在具有中高附着系数的路面上,估计器的局部弱可观测性很差。
102、3.3对两种结果进行融合
103、通过上述分析,可以设置适当的路面滑移率阈值,设计一种切换逻辑来实现更大范围激励内路面附着系数的估计。根据智能轮胎的路面附着估计结果μi和基于车辆动力学响应信息的路面附着系数估计结果μd,预设路面滑移率阈值λthrehold,确立如下的融合规则:
104、若λ<λthrehold,说明当前时刻路面滑移率较低,路面附着系数较高,路面类型识别结果较为准确,此时输出最终的路面附着系数以智能轮胎的估计结果为准,即μ=μi。
105、若λ>λthrehold说明当前时刻路面滑移率较高,路面附着系数较低,路面类型的特征并不明显,此时输出最终的路面附着系数以动力学响应的结果为准,即μ=μd。
106、本发明还提出一种电子装置,该装置能够执行上述方法。
107、综上所述,本发明为基于智能轮胎多传感器信息融合的路面附着系数估计方法及装置,通过将基于智能轮胎的路面附着估计方法和基于车辆动力学响应信息的路面附着系数估计方法结合,实现更大范围激励内路面附着系数的估计,所提出的方法在保证精度和速度的同时,可以更适用于多种多样的真实驾驶环境,为提高智能驾驶技术中决策和规划的工作性能,对汽车动力学状态观测和稳定性控制提供了新的解决思路。
108、本发明的有益效果:
109、(1)本发明的智能路面附着系数估计方法,首次借助智能轮胎的周向加速度信号功率谱密度的变化,利用轮胎振动模式来表征路面类型,根据burckhardt典型路面附着系数和滑移率模型,可以获得不同路面类型下的峰值路面附着系数的经验值,能有效地在路面激励较小时通过附着系数智能轮胎估计值估计路面附着系数,估计精度更高,实时性好。
110、(2)本发明的路面附着系数估计方法在通过智能轮胎,根据路面类型获得路面附着系数的估计值,通过与动力学估计算法进一步融合,可以获得更大激励范围内的路面附着系数估计值,相比传统的传感器估计方法,估计精度更高。
111、(3)本发明通过切换逻辑将路面附着系数智能轮胎估计值和路面附着系数动力学估计值融合,可以较好地做好控制的平滑切换,鲁棒性更好。
- 还没有人留言评论。精彩留言会获得点赞!