混合动力驱动装置、混合动力车辆的控制方法及车辆与流程
本发明涉及车辆设计,具体而言,涉及一种混合动力驱动装置、混合动力车辆的控制方法及车辆。
背景技术:
1、车辆的原地转向功能是一种有效提高车辆在狭小空间内的通过性的功能。当前该功能主要有三种技术路线:
2、一是使用四轮独立转向系统,如现有技术公开了一种《电动车辆的原地转向控制系统和方法》,能够独立控制各车轮的转向角度和转动方向,该方案对现有转向系统的修改幅度较大,对乘员舱和前机舱空间占用大,高速和高负荷下考虑轮胎和转向系统刚度问题控制技术难度高,因此目前仅在小型低速无人车等领域有所应用,暂无推广至日常使用车辆的案例;
3、二是机械差动转向系统,如现有技术公开了《一种可原地转向的差速转向机构》,方案是履带车辆和轮式工程车辆(如滑移装载机)中常见的差速转向方案,其需要锁止主输出轴,并使用一个额外的动力源驱动一侧半轴;另有该方案的简化版,如另一项现有技术公开了《联合收割机用360°原地转向行走变速箱》,通过锁止一侧半轴实现两侧车轮(或履带)一停一转,本质上是一种转向半径等于轮距的转向方案,与严格意义上的原地转向效果不同;
4、三是使用四轮独立驱动电机的差动转向系统,通过控制左右两侧电机向不同方向旋转实现原地转向,该方案使用电机数量较多,不仅成本较高,而且控制复杂度也大。
5、针对上述的无法在对车辆的总体布置改动较小的前提下保有车辆的原地转向功能的技术问题,目前尚未提出有效解决方案。
技术实现思路
1、本发明的主要目的在于提供一种混合动力驱动装置、混合动力车辆的控制方法及车辆,以解决现有技术中无法在对车辆的总体布置改动较小的前提下保有车辆的原地转向功能的问题。
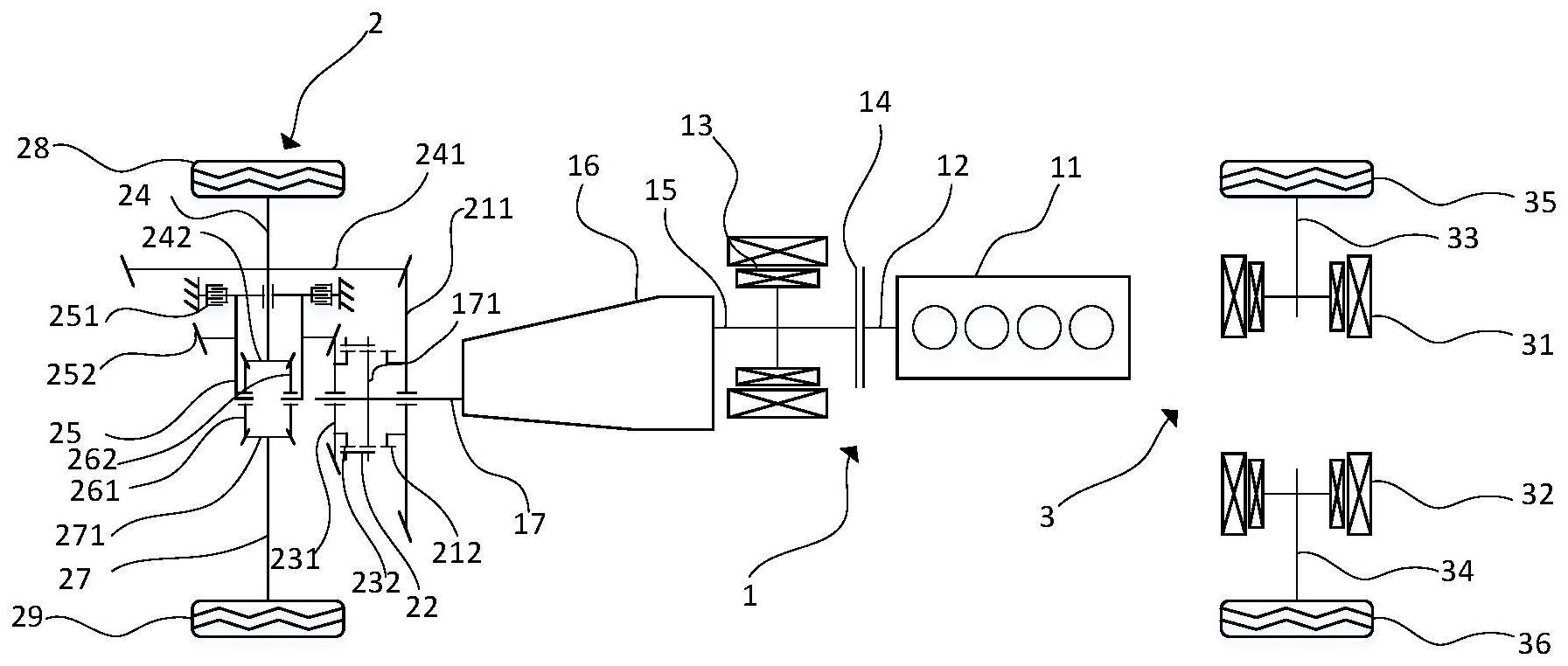
2、为了实现上述目的,根据本发明的一个方面,提供了一种混合动力驱动装置,包括:第一驱动组件,第一驱动组件至少包括发动机、第一电机和变速器,发动机具有第一传动轴,第一电机具有第二转动轴,变速器具有第三传动轴,第一传动轴与第二转动轴通过离合器连接,第二转动轴与变速器连接;第二驱动组件,第二驱动组件至少包括第二电机和第三电机,第二电机具有第三半轴,第三半轴与第三车轮连接,第三电机具有第四半轴,第四半轴与第四车轮连接;差动组件,差动组件与第三传动轴连接,差动组件具有第一半轴和第二半轴,第一半轴与车辆的第一车轮连接,第二半轴与车辆的第二车轮连接;差动组件具有差动状态和锁止状态,差动组件处于锁止状态时,第一半轴与第二半轴等速反向旋转,差动组件处于差动状态时,第一半轴与第二半轴实现差速转动。
3、进一步地,第一半轴上固连有第四锥齿轮,第一半轴与第三传动轴通过第一传动副可选择地连接,第二半轴上固连有第八锥齿轮,差动组件还包括:行星齿轮架,行星齿轮架转动连接于第一半轴,行星齿轮架通过制动器与车身连接,行星齿轮架与第三传动轴通过第二传动副可选择地连接;同步装置,同步装置具有将第三传动轴与第一传动副连接的第一同步状态和将第三传动轴与第二传动副连接的第二同步状态;第八锥齿轮与第四锥齿轮通过第六锥齿轮、第七锥齿轮啮合连接,第六锥齿轮、第七锥齿轮与行星齿轮架转动连接;制动器锁止时,差动组件处于锁止状态;制动器断开时,差动组件处于差动状态。
4、进一步地,第一传动副包括相互啮合的第一锥齿轮和第三锥齿轮,第二传动副包括相互啮合的第二锥齿轮和第五锥齿轮,其中,第一锥齿轮、第二锥齿轮均空套于第三传动轴上,第三锥齿轮固连于第一半轴上,第五锥齿轮固连于行星齿轮架上。
5、进一步地,第一锥齿轮上设置有第二齿轮,第二锥齿轮上设置有第三齿轮,同步装置包括:第一齿轮,第一齿轮固连于第三传动轴上;接合套,接合套与第一齿轮常啮合,接合套可选择地与第二齿轮、第三齿轮中的任意一个啮合;接合套与第二齿轮啮合时,同步装置处于第一同步状态,接合套与第三齿轮啮合时,同步装置处于第二同步状态。
6、根据本发明的另一方面,提供了一种混合动力车辆的控制方法,控制方法用于控制上述的混合动力驱动装置,控制方法包括如下步骤:获取混合动力车辆的工作需求、电池放电能力、高压电气系统状态,工作需求至少包括原地转向需求和行驶需求;基于工作需求、电池放电能力、高压电气系统状态,确定混合动力车辆的目标工作模式,并生成控制指令集,控制指令集用于控制制动器、离合器、发动机、第一电机、第二电机和第三电机中的至少一个工作,以使混合动力车辆处于目标工作模式,目标工作模式至少包括:混动原地转向模式、纯电动原地转向模式、纯电动行驶模式、混动行驶模式、跛行模式。
7、进一步地,基于工作需求、电池放电能力、高压电气系统状态,确定混合动力车辆的目标工作模式,并生成控制指令集,包括:在工作需求为原地转向需求、高压电气系统状态正常且电池放电能力不足的情况下,确定目标工作模式为混动原地转向模式,并生成控制指令集中的第一控制指令;第一控制指令用于控制接合套与第二齿轮啮合、制动器锁止、离合器接合、发动机处于工作状态、第一电机处于发电状态且第一电机向第二电机和第三电机供电、第二电机和第三电机处于驱动状态;混动原地转向模式下,发动机的一部分动力传递至第一电机用于发电,另一部分动力经过离合器、变速器、第一锥齿轮、第三锥齿轮输出至第一半轴,第二半轴与第一半轴等速反向旋转。
8、进一步地,基于工作需求、电池放电能力、高压电气系统状态,确定混合动力车辆的目标工作模式,并生成控制指令集,包括:在工作需求为原地转向需求、高压电气系统状态正常且电池放电能力足够的情况下,确定目标工作模式为纯电动原地转向模式,并生成控制指令集中的第二控制指令;第二控制指令用于控制接合套与第二齿轮啮合、制动器锁止、离合器断开、发动机关闭,第一电机、第二电机和第三电机均处于驱动状态;纯电动原地转向模式下,第一电机的动力经过变速器、第一锥齿轮、第三锥齿轮输出至第一半轴,第二半轴与第一半轴等速反向旋转。
9、进一步地,基于工作需求、电池放电能力、高压电气系统状态,确定混合动力车辆的目标工作模式,并生成控制指令集,包括:在工作需求为行驶需求、高压电气系统状态正常且电池放电能力足够的情况下,确定目标工作模式为纯电动行驶模式,并生成控制指令集中的第三控制指令;第三控制指令用于控制接合套与第三齿轮啮合、制动器断开、离合器断开、变速器处于空挡、发动机与第一电机均不工作、第二电机和第三电机处于驱动状态;纯电动行驶模式下,第二半轴与第一半轴差速转动。
10、进一步地,混动行驶模式包括串联模式、发动机直驱模式和并联模式,行驶需求包括低速行驶需求、高速低负荷行驶需求和高速高负荷行驶需求,基于工作需求、电池放电能力、高压电气系统状态,确定混合动力车辆的目标工作模式,并生成控制指令集,包括:在工作需求为低速行驶需求、高压电气系统状态正常且电池放电能力不足的情况下,确定目标工作模式为串联模式,并生成控制指令集中的第四控制指令;第四控制指令用于控制接合套与第三齿轮啮合、制动器断开、离合器接合、变速器处于空挡、发动机工作、第一电机处于发电状态、第二电机和第三电机处于驱动状态;串联模式下,第二半轴与第一半轴差速转动,发动机的动力传递至第一电机用于发电,第一电机向第二电机和第三电机供电。
11、进一步地,基于工作需求、电池放电能力、高压电气系统状态,确定混合动力车辆的目标工作模式,并生成控制指令集,包括:在工作需求为高速低负荷行驶需求、高压电气系统状态正常且电池放电能力不足的情况下,确定目标工作模式为发动机直驱模式,并生成控制指令集中的第五控制指令;第五控制指令用于控制接合套与第三齿轮啮合、制动器断开、离合器接合、变速器处于前进挡、发动机工作,第一电机、第二电机和第三电机均处于随转状态;发动机直驱模式下,第二半轴与第一半轴差速转动,发动机的动力通过离合器、变速器、第二锥齿轮、第五锥齿轮传递至行星齿轮架,并经第四锥齿轮、第六锥齿轮分别传递至第一车轮和第二车轮。
12、进一步地,基于工作需求、电池放电能力、高压电气系统状态,确定混合动力车辆的目标工作模式,并生成控制指令集,包括:在工作需求为高速高负荷行驶需求、高压电气系统状态正常且电池放电能力不足的情况下,确定目标工作模式为并联模式,并生成控制指令集中的第六控制指令;第六控制指令用于控制接合套与第三齿轮啮合、制动器断开、离合器接合、变速器处于前进挡、发动机工作,第一电机处于随转状态,第二电机和第三电机处于驱动状态;并联模式下,第二半轴与第一半轴差速转动,发动机的动力通过离合器、变速器、第二锥齿轮、第五锥齿轮传递至行星齿轮架,并经第四锥齿轮、第六锥齿轮分别传递至第一车轮和第二车轮,第二电机和第三电机的动力分别经第三半轴和第四半轴传递至第三车轮和第四车轮。
13、进一步地,跛行模式包括跛行行驶模式和跛行原地转向模式,基于工作需求、电池放电能力、高压电气系统状态,确定混合动力车辆的目标工作模式,并生成控制指令集,包括:在高压电气系统状态故障、工作需求为行驶需求的情况下,确定目标工作模式为跛行行驶模式,并生成控制指令集中的第七控制指令;第七控制指令用于控制接合套与第三齿轮啮合、制动器断开、离合器接合、变速器处于第一前进挡或第一倒车挡、发动机工作,第一电机、第二电机和第三电机均处于随转状态;跛行行驶模式下,第二半轴与第一半轴差速转动,发动机的动力通过离合器、变速器、第二锥齿轮、第五锥齿轮传递至行星齿轮架,并经第四锥齿轮、第六锥齿轮分别传递至第一车轮和第二车轮。
14、进一步地,基于工作需求、电池放电能力、高压电气系统状态,确定混合动力车辆的目标工作模式,并生成控制指令集,包括:在高压电气系统状态故障、工作需求为原地转向需求的情况下,确定目标工作模式为跛行原地转向模式,并生成控制指令集中的第八控制指令;第八控制指令用于控制接合套与第二齿轮啮合、制动器锁止、离合器接合、发动机处于工作状态、第一电机、第二电机和第三电机均处于随转状态;跛行原地转向模式下,发动机的动力经过离合器、变速器、第一锥齿轮、第三锥齿轮输出至第一半轴,第二半轴与第一半轴等速反向旋转。
15、进一步地,方法还包括:获取混合动力车辆的常规转向系统状态,常规转向系统至少包括方向盘转向控制系统;在工作需求为原地转向需求且常规转向系统状态故障的情况下,确定目标工作模式为跛行原地转向模式,并生成控制指令集中的第八控制指令。
16、根据本发明的另一方面,提供了一种车辆,车辆具有混合动力驱动装置,混合动力驱动装置为上述的混合动力驱动装置。
17、应用本发明的技术方案,第三车轮由第二电机驱动控制,第四车轮由第三电机驱动控制第一车轮与第二车轮由第一驱动组件的发动机或第一电机进行驱动,并由差动组件控制进行等速反向或差速转动,本方案中,发动机的设置可以实现纯机械驱动,三个电机的设置可以实现纯电力驱动,根据实际需要控制发动机和电机的状态,使得车辆进行混动驱动,可以有效节能,应用于原地转向时,第三车轮和第四车轮可以由独立的电机进行控制转向,第二车轮、第一车轮可以通过将差动组件切换至锁止状态,以使得第二车轮、第一车轮进行等速反向旋转,从而实现车辆的原地转向。并且,由于既可以令发动机向第二车轮、第一车轮输出动力,也可以令第一电机向第二车轮、第一车轮输出动力,车辆可以实现混动原地转向和纯电动原地转向,便于用户根据车辆实际情况选择合适的转向模式,进而实现混合动力驱动装置的节能和高效控制,相比于现有技术中的车辆转向系统,本方案中对车辆的总体布置改动较小,且可实现的转向功能更多样,控制也更简单。
- 还没有人留言评论。精彩留言会获得点赞!