辅助驾驶横向控制方法、系统、车辆及存储介质与流程
本发明涉及辅助驾驶,尤其涉及一种辅助驾驶横向控制方法、系统、车辆及存储介质。
背景技术:
1、车道保持辅助系统是一种高级驾驶辅助系统。当驾驶员未意识到车辆偏离车道,且未采取纠正措施时,车道保持辅助系统将主动介入转向控制,将车辆纠正回到行驶车道中心,避免因车辆偏离车道引发的交通事故,对提升车辆行驶安全具有重要意义。车辆横向控制(车辆横向纠偏控制)是车道保持辅助系统进行驾驶控制的核心,它直接影响到车辆控制的稳定性和安全性。
2、目前,行业通常采用驾驶员单点预瞄模型或模型预测控制,实现车道保持功能。然而,驾驶员单点预瞄模型不能对车辆运动轨迹、姿态、转向等变量进行较优控制。模型预测控制则大多是基于车辆绝对坐标系下的模型预测跟踪控制,需要gnss(global navigationsatellite system,全球导航卫星系统)及rtk(real-time kinematic,实时动态定位)等高精度定位传感器确定车辆在绝对坐标下精确位置,以确定车辆当前姿态,从而进行车辆横向控制,成本较高。
技术实现思路
1、本发明提供一种辅助驾驶横向控制方法、系统、车辆及存储介质,用以解决现有技术中的车辆横向控制需要采用高精度定位传感器,确定车辆在绝对坐标下精确位置,以确定车辆当前姿态,从而进行车辆横向控制,导致横向控制成本较高的问题。
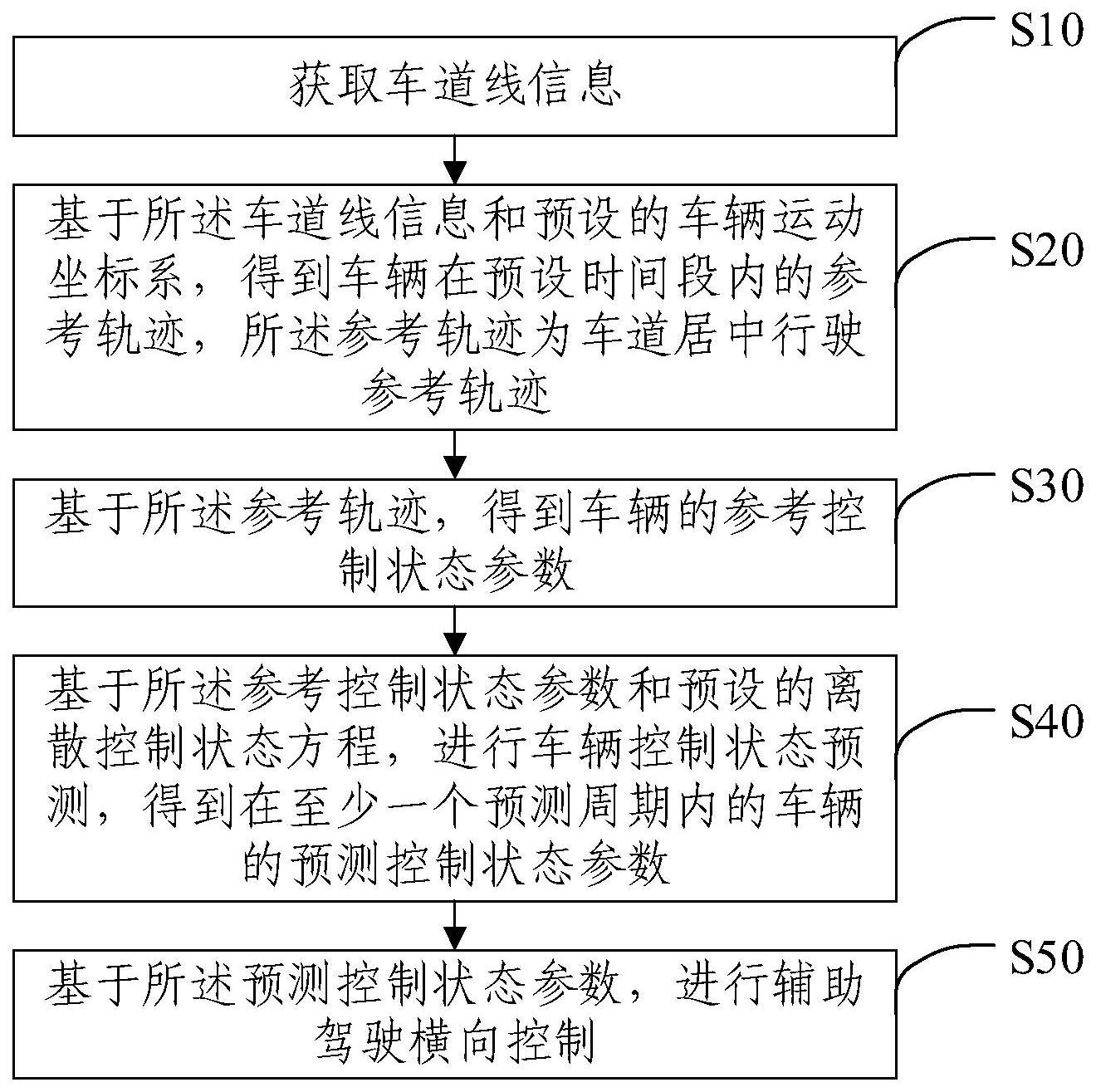
2、本发明提供一种辅助驾驶横向控制方法,包括:
3、获取车道线信息;
4、基于所述车道线信息和预设的车辆运动坐标系,得到车辆在预设时间段内的参考轨迹,所述参考轨迹为车道居中行驶参考轨迹;
5、基于所述参考轨迹,得到车辆的参考控制状态参数;
6、基于所述参考控制状态参数和预设的离散控制状态方程,进行车辆控制状态预测,得到在至少一个预测周期内的车辆的预测控制状态参数;
7、基于所述预测控制状态参数,进行辅助驾驶横向控制。
8、可选地,所述基于所述车道线信息和预设的车辆运动坐标系,得到车辆在预设时间段内的参考轨迹的步骤包括:
9、以车辆前轴中心为原点,以车辆纵向为横轴,并以车辆横向为纵轴,建立车辆运动坐标系;
10、对所述车道线信息进行坐标变换,得到在所述车辆运动坐标系下的车道线坐标信息;
11、基于所述车道线坐标信息,进行曲线拟合,得到车道中心线方程;
12、基于所述车道中心线方程,得到车辆在预设时间段内的所述参考轨迹。
13、可选地,所述基于所述参考轨迹,得到车辆的参考控制状态参数的步骤包括:
14、基于所述参考轨迹和所述车道中心线方程,得到车辆运动坐标系下多个行驶长度所对应的所述参考控制状态参数。
15、可选地,所述离散控制状态方程的获取步骤包括:
16、基于预设的静止坐标系,建立车辆的运动学模型;
17、基于所述车辆的运动学模型,得到车辆运动状态方程;
18、通过对所述车辆运动状态方程进行线性化处理,得到线性状态方程,所述线性化处理包括:泰勒级数展开、去除高次项、以及求雅可比矩阵;
19、通过对所述线性状态方程进行离散控制处理,得到所述离散控制状态方程,所述离散控制处理包括前向欧拉离散化处理;所述离散控制状态方程中下一预测周期的预测控制状态参数由当前预测周期的预测控制状态参数得到,所述预测控制状态参数为当前控制状态参数与对应的所述参考控制状态参数之间的差值,所述预测控制参数包括:预测坐标信息、预测横摆角和预测转向角度。
20、可选地,所述基于所述参考控制状态参数和预设的离散控制状态方程,进行车辆控制状态预测,得到在至少一个预测周期内的车辆的预测控制状态参数的步骤包括:
21、基于所述参考控制状态参数中初始时刻的初始参考控制参数,得到初始控制状态参数,所述初始控制状态参数作为所述离散控制状态方程的输入量;所述初始控制状态参数包括:初始坐标信息、初始横摆角和初始转向角度;所述初始坐标信息的确定方式为将0与初始参考控制参数中的参考坐标之间的差值,确定为所述初始坐标信息;所述初始横摆角的确定方式为将0与初始参考控制参数中的参考横摆角之间的差值,确定为所述初始横摆角;所述初始转向角度的确定方式为将上一预测周期的预测转向角度与初始参考控制参数中的参考转向角度之间的差值,确定所述初始转向角度;
22、将所述初始控制状态参数和所述参考控制状态参数输入所述离散控制状态方程,进行车辆控制状态预测,得到在至少一个预测周期内的车辆的所述预测控制状态参数。
23、可选地,基于所述预测控制状态参数,进行辅助驾驶横向控制的步骤包括:
24、基于所述预测控制状态参数、预设的代价函数和约束条件,得到车辆辅助驾驶横向控制的转向角度最优解;所述代价函数基于所述预测控制状态参数得到,所述代价函数包括用于调整所述预测控制状态参数的权重矩阵;
25、基于所述转向角度最优解,进行辅助驾驶横向控制。
26、可选地,所述约束条件包括:
27、当所述预测控制状态参数中的预测转向角度在预设的转向角度阈值范围内,且所述预测转向角度的变化值在预设的转向变化阈值范围内时,将所述预测转向角度确定为所述转向角度最优解;所述转向角度阈值范围基于预设的横向加速度限值确定,所述转向变化阈值范围基于预设的横向加速度变化率限值确定。
28、本发明还提供一种辅助驾驶横向控制系统,包括:
29、车道线获取模块,用于获取车道线信息;
30、参考轨迹获取模块,用于基于所述车道线信息和预设的车辆运动坐标系,得到车辆在预设时间段内的参考轨迹,所述参考轨迹为车道居中行驶参考轨迹;
31、参考控制状态参数获取模块,用于基于所述参考轨迹,得到车辆的参考控制状态参数;
32、预测模块,用于基于所述参考控制状态参数和预设的离散控制状态方程,进行车辆控制状态预测,得到在至少一个预测周期内的车辆的预测控制状态参数;
33、横向控制模块,用于基于所述预测控制状态参数,进行辅助驾驶横向控制。
34、本发明还提供一种车辆,包括:前视摄像头和辅助驾驶横向控制系统,所述前视摄像头用于获取车道线图像或视频;
35、所述辅助驾驶横向控制系统包括:
36、车道线获取模块,用于基于所述车道线图像或视频,以获取车道线信息;
37、参考轨迹获取模块,用于基于所述车道线信息和预设的车辆运动坐标系,得到车辆在预设时间段内的参考轨迹,所述参考轨迹为车道居中行驶参考轨迹;
38、参考控制状态参数获取模块,用于基于所述参考轨迹,得到车辆的参考控制状态参数;
39、预测模块,用于基于所述参考控制状态参数和预设的离散控制状态方程,进行车辆控制状态预测,得到在至少一个预测周期内的车辆的预测控制状态参数;
40、横向控制模块,用于基于所述预测控制状态参数,进行辅助驾驶横向控制。
41、本发明还提供一种电子设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述程序时实现如上述任一种所述辅助驾驶横向控制方法的步骤。
42、本发明还提供一种非暂态计算机可读存储介质,其上存储有计算机程序,该计算机程序被处理器执行时实现如上述任一种所述辅助驾驶横向控制方法的步骤。
43、本发明的有益效果:本发明提供的辅助驾驶横向控制方法、系统、车辆及存储介质,通过获取车道线信息;基于车道线信息和预设的车辆运动坐标系,得到车辆在预设时间段内的参考轨迹,参考轨迹为车道居中行驶参考轨迹;基于参考轨迹,得到车辆的参考控制状态参数;基于参考控制状态参数和预设的离散控制状态方程,进行车辆控制状态预测,得到在至少一个预测周期内的车辆的预测控制状态参数;基于预测控制状态参数,进行辅助驾驶横向控制。本发明以车辆运动坐标系为参考坐标系,无需采用定位传感器确定车辆在绝对坐标下的位置,即可实现对车辆的辅助驾驶横向控制,精确度较高,成本较低,可实施性较强。
- 还没有人留言评论。精彩留言会获得点赞!