一种工地洗车机控制方法及系统与流程
本发明涉及建筑工程,特别是指一种工地洗车机控制方法及系统。
背景技术:
1、在工地环境中,由于土尘和建筑物料,车辆往往会变得非常脏,需要经常清洗。传统的工地洗车机通常采用固定的喷水角度、喷水强度和刷子速度进行洗车,这种方法虽然简单,但并不能针对不同位置的脏污程度进行个性化清洗,效果并不理想。例如,车辆的底盘和车轮往往比车身更脏,但传统的洗车机却无法针对这些部位进行强力清洗。
2、此外,传统的洗车机也无法实时监测车辆的行驶速度和位置,无法根据车辆的状态自动调整洗车设备的参数,这就导致了洗车效果的不稳定。同时,由于缺乏有效的评估机制,洗车后是否达到预期的清洗效果也无法得知。
技术实现思路
1、本发明要解决的技术问题是提供一种工地洗车机控制方法及系统,可以自动调整洗车设备的喷水角度、喷水强度和洗车刷的速度,可以更有效地清洗车辆的各个部位,提高了洗车效率和效果。
2、为解决上述技术问题,本发明的技术方案如下:
3、第一方面,一种工地洗车机控制方法,所述方法包括:
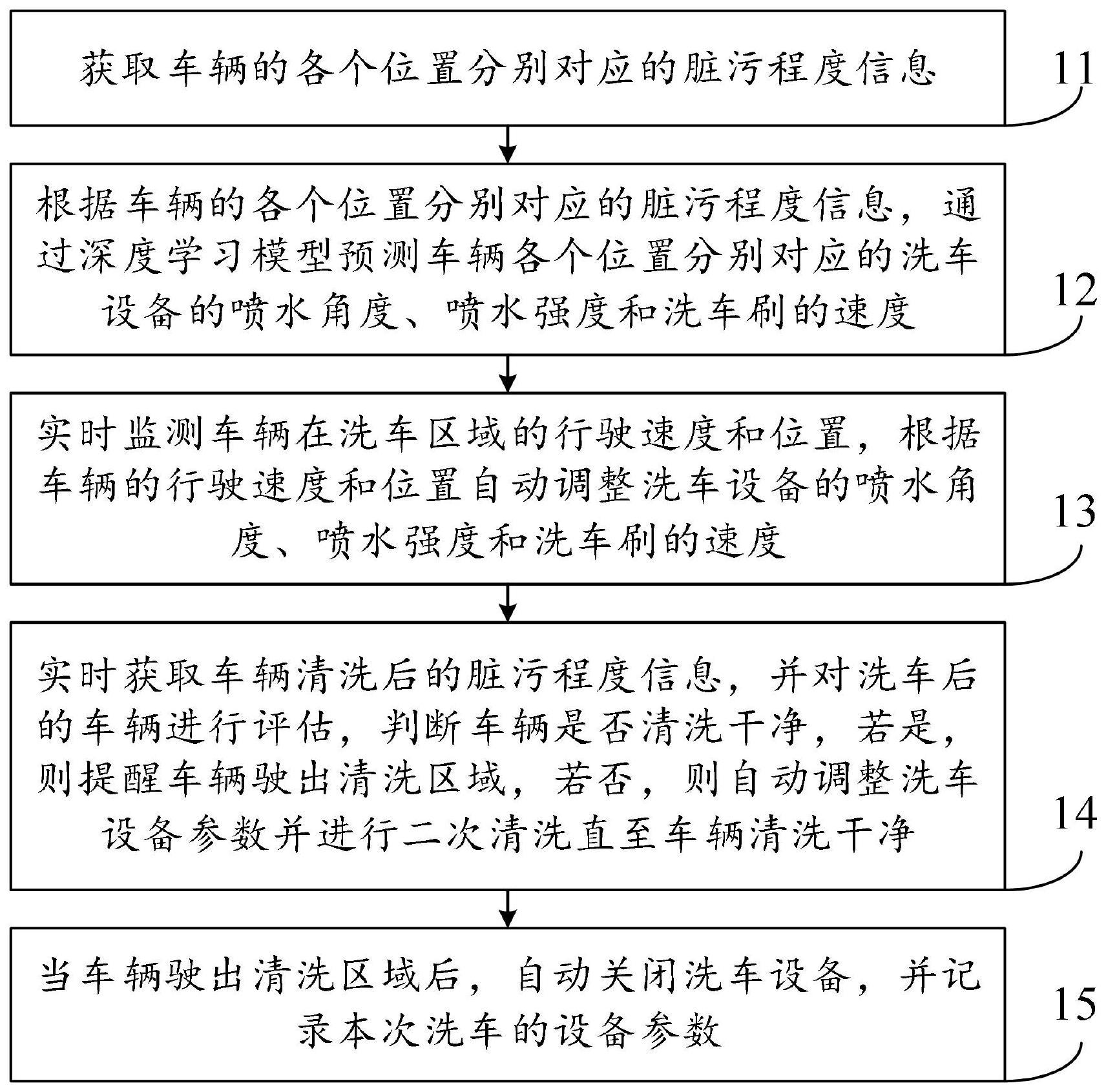
4、获取车辆的各个位置分别对应的脏污程度信息;
5、根据车辆的各个位置分别对应的脏污程度信息,通过深度学习模型预测车辆各个位置分别对应的洗车设备的喷水角度、喷水强度和洗车刷的速度;
6、实时监测车辆在洗车区域的行驶速度和位置,根据车辆的行驶速度和位置自动调整洗车设备的喷水角度、喷水强度和洗车刷的速度;
7、实时获取车辆清洗后的脏污程度信息,并对洗车后的车辆进行评估,判断车辆是否清洗干净,若是,则提醒车辆驶出清洗区域,若否,则自动调整洗车设备参数并进行二次清洗直至车辆清洗干净;
8、当车辆驶出清洗区域后,自动关闭洗车设备,并记录本次洗车的设备参数。
9、进一步的,获取车辆的各个位置分别对应的脏污程度信息,包括:
10、利用摄像头,在车辆进入洗车区域时开始连续拍摄,捕捉车辆在洗车过程中的实时图像;
11、将摄像头拍摄到的实时图像数据通过网络实时传输到中央处理系统;
12、接收到实时图像后,进行图像预处理和图像分析,通过预先训练好的深度学习模型,实时识别出车辆各个部位的脏污程度。
13、进一步的,实时监测车辆在洗车区域的行驶速度和位置,根据车辆的行驶速度和位置自动调整洗车设备的喷水角度、喷水强度和洗车刷的速度,包括:
14、若根据深度学习模型预测的喷水角度、喷水强度和洗车刷的速度是连续的数值,则根据实际设备的参数范围进行解析和转换;
15、解析转换后的参数通过控制伺服电机调整喷水角度,通过调节水泵的工作压力改变喷水强度,或通过调节电机的转速改变洗车刷的速度;
16、实时地获取车辆的状态信息,并输入到模型中进行预测,并根据预测结果来调整设备参数。
17、进一步的,实时获取车辆清洗后的脏污程度信息,并对洗车后的车辆进行评估,判断车辆是否清洗干净,若是,则提醒车辆驶出清洗区域,若否,则自动调整洗车设备参数并进行二次清洗直至车辆清洗干净,包括:
18、实时获取车辆洗车后的图像数据;
19、对所述图像数据进行去噪,以得到去噪图像,调整去噪图像的对比度,以增强图像的亮度差异;
20、使用图像处理方法对增强亮度的图像进行特征提取;
21、将提取出的特征输入到预训练好的深度学习模型中,以得到预测结果;
22、根据预测结果进行判断,如果预测车辆已清洗干净,则让车辆离开洗车区域;如果预测车辆未清洗干净,则调整洗车设备参数并进行再次清洗。
23、进一步的,使用图像处理方法对增强亮度的图像进行特征提取,包括:
24、将增强亮度的图像进行灰度化处理,以得到灰度图像;
25、通过边缘检测提取灰度图像中的结构信息;
26、对所述结构信息进行角点检测,以得到图像中的特殊结构;
27、对所述结构信息和特殊结构进行编码,以得到特征信息。
28、进一步的,将增强亮度的图像进行灰度化处理,以得到灰度图像,包括:
29、读取图像数据,并通过调整图像亮度,其中,ioutput为输出图像,iinput为输入图像,imin和imax为输入图像的最小和最大亮度,omin和omax为输出图像的最小和最大亮度;
30、通过将输出图像转换到hsi颜色空间,并取i1作为灰度值,其中,r,g,b分别为像素点的红、绿、蓝三个通道的值,i1为图像的灰度值;
31、通过对灰度图像进行处理,以得到滤波后的图像,其中,ifiltered为滤波后的图像,w为滤波器权重,i为原图像,(x,y)为像素点的位置,(m,n)为滤波器内的位置,a和b为滤波器的大小。
32、进一步的,通过边缘检测提取灰度图像中的结构信息,包括:
33、通过强化图像中的边缘信息,其中,gx和gy是通过应用边缘检测算子到图像上得到的水平和垂直梯度;
34、对于图像的每一个像素点,找到每一个像素点在梯度方向上的两个邻居点,比较当前像素点和它的两个邻居点的梯度幅度,以得到物体的边缘线;
35、对物体的边缘线进行双阈值处理,以确定最终的边缘。
36、第二方面,一种工地洗车机控制系统,包括:
37、获取模块,用于获取车辆的各个位置分别对应的脏污程度信息;根据车辆的各个位置分别对应的脏污程度信息,通过深度学习模型预测车辆各个位置分别对应的洗车设备的喷水角度、喷水强度和洗车刷的速度;实时监测车辆在洗车区域的行驶速度和位置,根据车辆的行驶速度和位置自动调整洗车设备的喷水角度、喷水强度和洗车刷的速度;
38、处理模块,用于实时获取车辆清洗后的脏污程度信息,并对洗车后的车辆进行评估,判断车辆是否清洗干净,若是,则提醒车辆驶出清洗区域,若否,则自动调整洗车设备参数并进行二次清洗直至车辆清洗干净;当车辆驶出清洗区域后,自动关闭洗车设备,并记录本次洗车的设备参数。
39、第三方面,一种计算机设备,包括:
40、一个或多个处理器;
41、存储装置,用于存储一个或多个程序,当所述一个或多个程序被所述一个或多个处理器执行,使得所述一个或多个处理器实现所述的方法。
42、第四方面,一种计算机可读存储介质,所述计算机可读存储介质中存储有程序,该程序被处理器执行时实现所述的方法。
43、本发明的上述方案至少包括以下有益效果:
44、本发明的上述方案,采用深度学习模型预测车辆各个位置的脏污程度,可以自动调整洗车设备的喷水角度、喷水强度和洗车刷的速度,可以更有效地清洗车辆的各个部位,提高了洗车效率和效果。
45、通过实时监测车辆在洗车区域的行驶速度和位置,能够根据车辆的实际情况自动调整洗车设备的参数,使得洗车过程更加智能化和个性化,不仅可以提高洗车效果,还可以避免对车辆造成的潜在损害。
46、实时获取车辆清洗后的脏污程度信息,并对洗车后的车辆进行评估,如果车辆没有清洗干净,可以自动调整洗车设备参数并进行二次清洗,可以确保每一辆车都能被清洗干净,提高了洗车的质量。
47、当车辆驶出清洗区域后,自动关闭洗车设备,并记录本次洗车的设备参数,这样可以节省能源,同时也便于对洗车过程进行数据分析和优化,提高了洗车设备的使用效率。
48、因此,本发明能够实现对工地车辆的个性化、自动化和智能化清洗,提高了洗车效果和效率,减少了能源消耗,具有很大的实用价值。
- 还没有人留言评论。精彩留言会获得点赞!