一种车辆路口通行方法、装置、设备及可读存储介质与流程
本发明实施例涉及智能控制,具体涉及一种车辆路口通行方法、装置、设备及可读存储介质。
背景技术:
1、当前车辆在通过有红绿灯的路口时,仅仅依靠环境感知的视觉传感器仅可以知道目前红绿灯的状态,无法根据无法目前红绿灯的状态以及其他的相关信息合理控制车辆顺利通过红绿灯路口,可能会造成急减速急加速情况。而且,对于一般的车辆而言,在通过红绿灯路口时,可能需要急减速等红灯或者急加速赶在指示灯变化之前通过路口,伴随着的是频繁地起停或者行驶安全问题,不但增加耗能,而且还会威胁到周围行人安全。因此,需要提供一种车辆路口通过方法,提高车辆通过路口的智能性。
技术实现思路
1、鉴于上述问题,本发明实施例提供了一种车辆路口通行方法、装置、设备及可读存储介质,用于解决现有技术中存在的红绿灯路口车辆通行智能性较低、安全性较低的技术问题。
2、根据本发明实施例的一个方面,提供了一种车辆路口通行方法,所述方法包括:
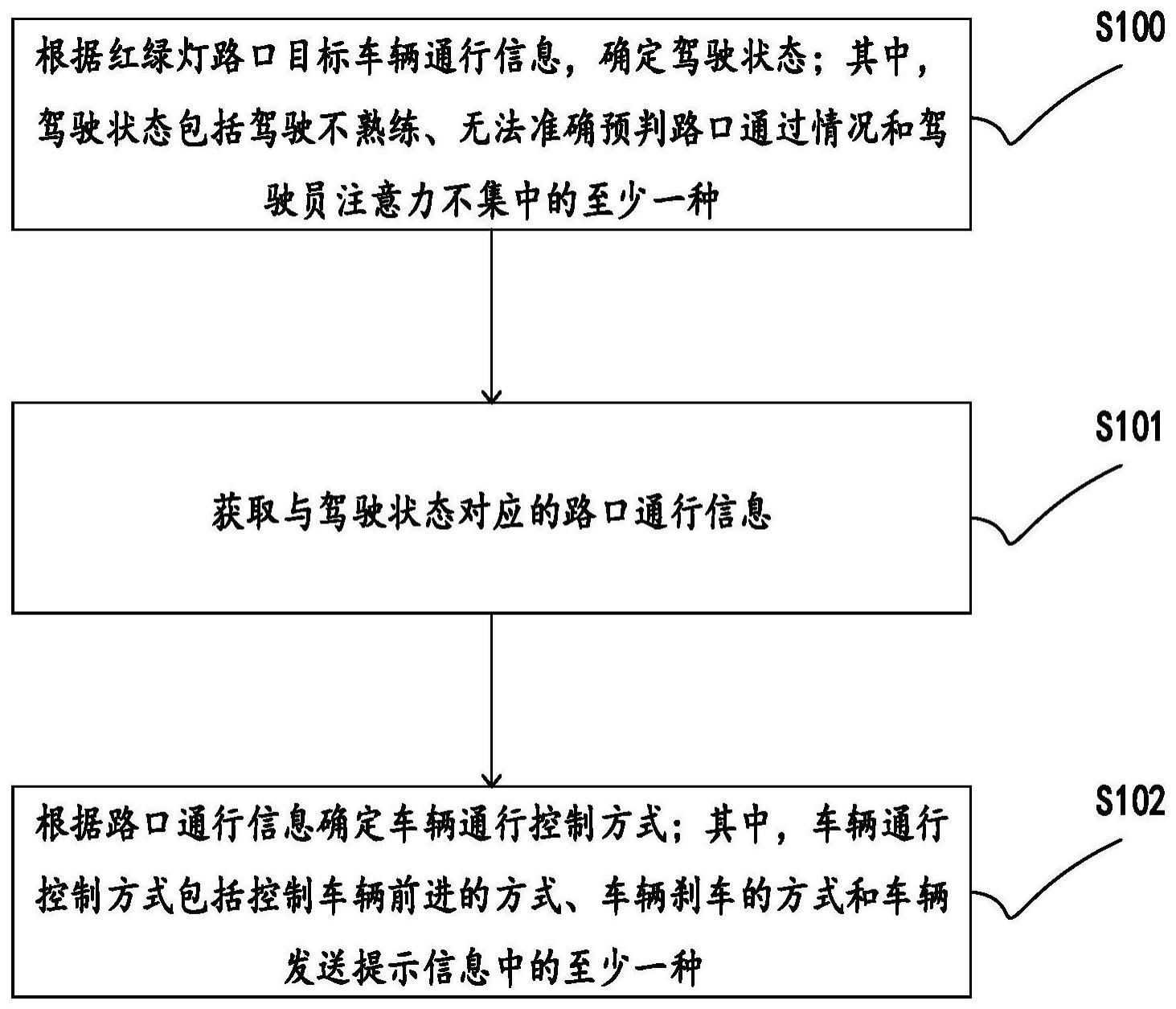
3、根据红绿灯路口目标车辆通行信息,确定驾驶状态;其中,所述驾驶状态包括驾驶不熟练、无法准确预判路口通过情况和驾驶员注意力不集中的至少一种;
4、获取与所述驾驶状态对应的路口通行数据;
5、根据所述路口通行数据确定车辆通行控制指令;其中,所述车辆通行控制指令包括控制车辆前进方式的指令、车辆刹车方式的指令和车辆发送提示信息的指令中的至少一种。
6、可选的,所述根据红绿灯路口目标车辆通行信息,确定驾驶状态,包括:
7、获取所述红绿灯路口目标车辆通行信息中的起步时间阈值、历史起步时间数据和驾驶员视线信息;
8、当根据所述历史起步时间数据确定起步时间超过所述起步时间阈值的概率大于预设阈值时,确定所述驾驶状态为所述驾驶不熟练;
9、和/或当根据所述驾驶员视线信息识别到驾驶员视线离开前方和/或手松开反向盘时,确定所述驾驶状态为所述驾驶员注意力不集中;
10、和/或根据接收的指示指令确定所述驾驶状态为所述无法准确预判路口通过情况。
11、可选的,所述获取与所述驾驶状态对应的路口通行数据,包括:
12、当所述驾驶状态为所述驾驶不熟练时,获取与目标车辆操作方式对应的所述路口通行数据;其中,所述目标车辆操作方式包括自动挡和手动挡;
13、当所述驾驶状态为所述无法准确预判路口通过情况时,获取与目标车辆行驶同方向的路口相邻车辆行驶信息对应的所述路口通行数据;其中,所述路口相邻车辆行驶信息包括前方有车辆、前方无车辆和存在超车车辆中的至少一种;
14、当所述驾驶状态为所述驾驶员注意力不集中时,获取与注意力等级对应的所述路口通行数据。
15、可选的,所述获取与目标车辆操作方式对应的所述路口通行数据,包括:
16、当所述目标车辆操作方式为所述自动挡时,获取车辆控制提示信息;其中,所述车辆控制提示信息包括前进、刹车控制指令信息和空挡、刹车控制指令信息;
17、当所述目标车辆操作方式为所述手动挡时,获取车辆起步提示信息;其中,所述车辆起步提示信息包括与等待红灯操作对应的空挡、手刹控制指令,以及与起步操作对应的前进挡、离合器控制指令。
18、可选的,所述获取与目标车辆行驶同方向的路口相邻车辆行驶信息对应的所述路口通行数据,包括:
19、当所述路口相邻车辆行驶信息为所述前方无车辆时,获取当前距离路口路程、当前车速、距离绿灯消失时间和路段限速信息;
20、当所述路口相邻车辆行驶信息为所述前方有车辆时,获取与前车距离信息、前车车速、所述当前车速、所述当前距离路口路程和所述距离绿灯消失时间;
21、当所述路口相邻车辆行驶信息为所述存在超车车辆时,获取超速车辆速度、所述当前车速、所述当前距离路口路程和所述距离绿灯消失时间。
22、可选的,所述根据所述路口通行数据确定车辆通行控制指令,包括:
23、当所述路口相邻车辆行驶信息为所述前方无车辆时,计算得到最快能通过路口时间;其中,tmax=l/v1,tmax为所述最快能通过路口时间,l为所述当前距离路口路程,v1为所述路段限速信息;
24、或者当所述路口相邻车辆行驶信息为所述前方有车辆时,计算得到所述最快能通过路口时间;其中,tmax=l/vq1,vq1为前车车速;
25、或者当所述路口相邻车辆行驶信息为所述存在超车车辆时,计算得到所述最快能通过路口时间;其中,tmax=l/vq2,vq2为前车超车后的车速;
26、判断所述最快能通过路口时间和所述距离绿灯消失时间的大小;
27、当所述最快能通过路口时间大于所述距离绿灯消失时间时,发送缓慢减速的提示信息;
28、当所述最快能通过路口时间小于所述距离绿灯消失时间时,根据所述当前车速、所述当前距离路口路程和所述距离绿灯消失时间确定保持当前车速行驶或者加速行驶。
29、可选的,所述根据所述当前车速、所述当前距离路口路程和所述距离绿灯消失时间确定保持当前车速行驶或者加速行驶,包括:
30、根据公式1和公式2得到t1=2x/(vt+vo),vt=2x/t1-vo;所述公式1为vt-vo=at1,所述公式2为2ax=vt2-vo2;vt是加速后保持的车速,vo为所述当前车速,a为汽车加速度,t1为加速时间,x为完成加速过程所行驶的路程;
31、确定加速完成后匀速行驶所花费时间为t2,t2=(l-x)/vt,路段花费时间总和为t,t=t1+t2=[x(vt-vo)+l(vt+vo)]/[(vt+vo)vt];
32、根据所述路段限速信息,得到所述保持当前车速行驶或者所述加速行驶对应的速度vt的范围;其中,v1>vt>(2l/t-vo)。
33、根据本发明实施例的另一方面,提供了一种车辆路口通行装置,包括:
34、驾驶状态确定模块,用于根据红绿灯路口目标车辆通行信息,确定驾驶状态;其中,所述驾驶状态包括驾驶不熟练、无法准确预判路口通过情况和驾驶员注意力不集中的至少一种;
35、路口通行数据获取模块,用于获取与所述驾驶状态对应的路口通行数据;
36、车辆通行控制指令确定模块,用于根据所述路口通行数据确定车辆通行控制指令;其中,所述车辆通行控制指令包括控制车辆前进的方式、车辆刹车的方式和车辆发送提示信息中的至少一种。
37、根据本发明实施例的另一方面,提供了一种车辆路口通行设备,包括:
38、存储器,用于存储计算机程序;
39、处理器,用于执行所述计算机程序时实现如上述的车辆路口通行方法。
40、根据本发明实施例的另一方面,提供了一种计算机可读存储介质,所述计算机可读存储介质中存储有计算机可执行指令,所述计算机可执行指令被处理器加载并执行时,实现如上述的车辆路口通行方法的步骤。
41、本发明实施例通过根据红绿灯路口目标车辆通行信息,确定司机当前的驾驶状态,从而获取与驾驶状态对应的路口通行数据,进而路口通行数据准确的确定车辆通行控制指令,对车辆进行准确的控制。和当前不对驾驶状态进行分析,仅仅依靠环境感知的视觉传感器判断目前红绿灯的状态,无法根据目前红绿灯的状态以及其他的相关信息合理控制车辆顺利通过红绿灯路口,造成急减速急加速情况相比,本发明可以根据驾驶状态准确的确定车辆通行控制指令,从而防止车辆急减速急加速,能够提高车辆驾驶智能性,以及提高车辆控制的精准性,和提高用户的体验感。
42、上述说明仅是本发明实施例技术方案的概述,为了能够更清楚了解本发明实施例的技术手段,而可依照说明书的内容予以实施,并且为了让本发明实施例的上述和其它目的、特征和优点能够更明显易懂,以下特举本发明的具体实施方式。
- 还没有人留言评论。精彩留言会获得点赞!