一种电驱动系统控制方法及系统与流程
本发明涉及新能源汽车,特别涉及一种电驱动系统控制方法及系统。
背景技术:
1、随着科技的进步以及生产力的快速发展,新能源汽车已经逐渐得到了人们的认可,并且已经在人们的日常生活中得到普及,方便了人们的生活,同时提升了人们的使用体验。
2、其中,电驱动系统是新能源汽车的核心零部件之一,用于给新能源汽车提供动力,具体的,微控制单元(microcontroller unit;mcu)是整个电驱动系统的核心,用于读取各个控制单元的工作状态,并对各个单元进行控制。更具体的,逆变器是用于驱动电机工作的关键部件,其寿命和开关损耗值直接影响了电驱动系统的性能以及寿命。
3、现有的逆变器大部分采用空间矢量脉宽调制方法来控制输出电压矢量的大小和方向,以实现对电机转速和转矩的控制。然而,当上述方法控制电机处于高速运行时,由于电池输出电压和逆变器开关状态的限制,导致不能充分利用直流母线产生的电压,使得输出的电压矢量幅值不足,从而无法满足驱动电机的工作需求,对应降低了用户的使用体验。
技术实现思路
1、基于此,本发明的目的是提供一种电驱动系统控制方法及系统,以解决现有技术不能充分利用直流母线产生的电压,使得输出的电压矢量幅值不足,导致无法满足驱动电机工作需求的问题。
2、本发明实施例第一方面提出了一种电驱动系统控制方法,其中,所述方法包括:
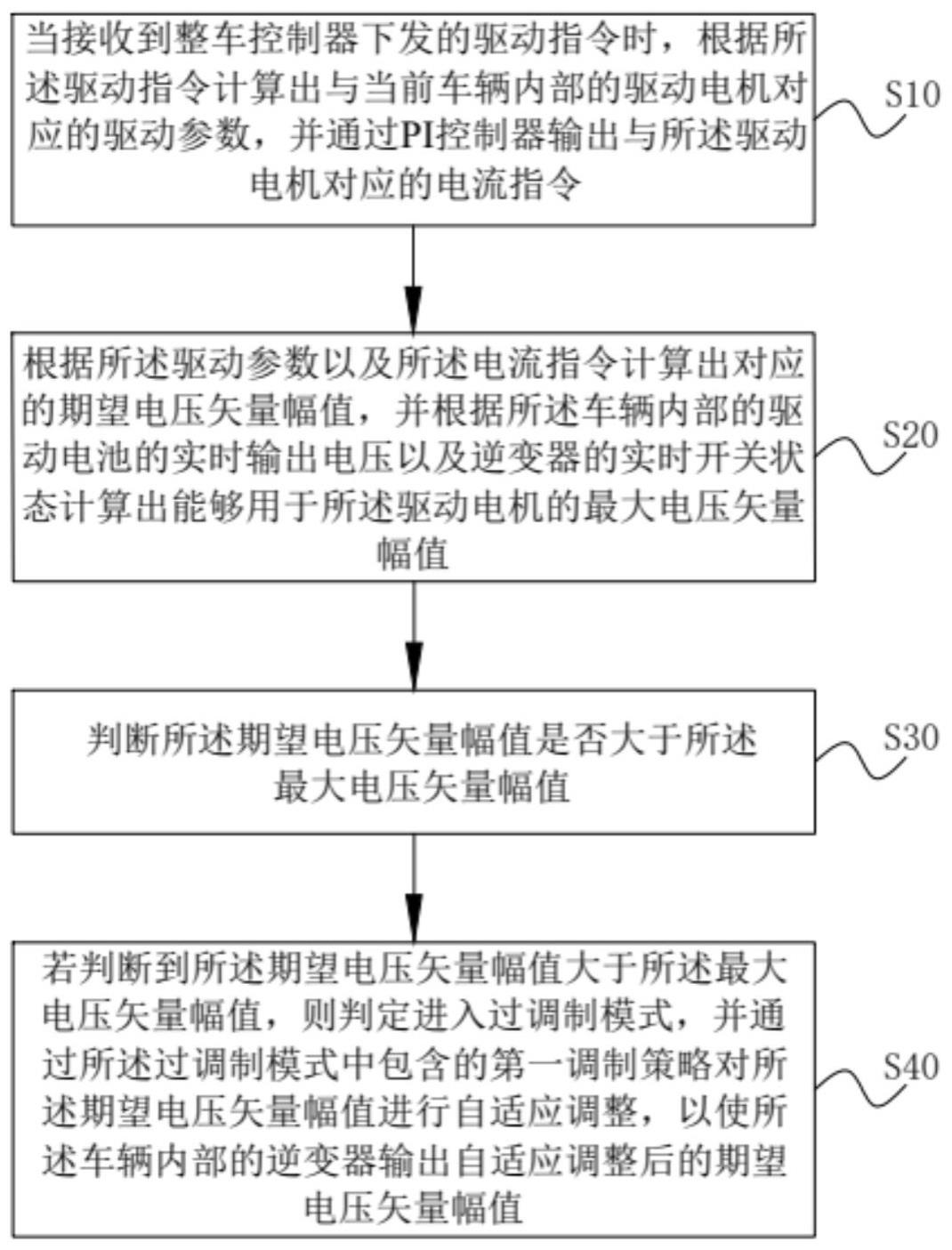
3、当接收到整车控制器下发的驱动指令时,根据所述驱动指令计算出与当前车辆内部的驱动电机对应的驱动参数,并通过pi控制器输出与所述驱动电机对应的电流指令;
4、根据所述驱动参数以及所述电流指令计算出对应的期望电压矢量幅值,并根据所述车辆内部的驱动电池的实时输出电压以及逆变器的实时开关状态计算出能够用于所述驱动电机的最大电压矢量幅值;
5、判断所述期望电压矢量幅值是否大于所述最大电压矢量幅值;
6、若判断到所述期望电压矢量幅值大于所述最大电压矢量幅值,则判定进入过调制模式,并通过所述过调制模式中包含的第一调制策略对所述期望电压矢量幅值进行自适应调整,以使所述车辆内部的逆变器输出自适应调整后的期望电压矢量幅值。
7、本发明的有益效果是:通过实时根据接收到的驱动指令计算出驱动电机需要的驱动参数以及电流指令,基于此,计算出与当前驱动指令对应的期望电压矢量幅值,与此同时,同步根据驱动电池的实时参数计算出能够用于当前驱动电机的最大电压矢量幅值,基于此,再实时判断当前期望电压矢量幅值与最大电压矢量幅值两者之间的大小,就能够对应判定出是否需要进入过调制模式,从而能够对应调整逆变器输出的电压矢量幅值的大小,进而能够实时满足驱动电机的工作需求,对应提升了用户的使用体验。
8、优选的,所述根据所述驱动参数以及所述电流指令计算出对应的期望电压矢量幅值的步骤包括:
9、当获取到所述电流指令时,构建出与所述驱动电机适配的直轴以及交轴,并根据所述驱动参数计算出与所述直轴对应的第一期望电压分量、与所述交轴对应的第二期望电压分量;
10、将所述第一期望电压分量以及所述第二期望电压分量同时输入至预设坐标系中,以将所述第一期望电压分量转换成对应的第一矢量幅值、将所述第二期望电压分量转换成对应的第二矢量幅值;
11、对所述第一矢量幅值以及所述第二矢量幅值进行累加处理,以对应生成所述期望电压矢量幅值。
12、优选的,计算出所述第一期望电压分量的表达式为:
13、vd_ref=rs×id_ref-p×ωr×ls×iq_ref
14、其中,vd_ref表示所述第一期望电压分量,rs表示相电阻,ls表示相电感,p表示极对数,id_ref-p和iq_ref均表示所述电流指令,ωr表示转子转速;
15、计算出所述第二期望电压分量的表达式为:
16、vq_ref=rs×iq_ref+p×ωr×(ls×id_ref+φf)
17、其中,vq_ref表示所述第二期望电压分量,rs表示相电阻,ls表示相电感,p表示极对数,iq_ref和id_ref均表示所述电流指令,φf表示永磁体磁链。
18、优选的,所述通过所述正常调制模式中包含的第二调制策略获取到所述期望电压矢量幅值的步骤包括:
19、根据所述第一期望电压分量、所述第二期望电压分量以及所述工作扇区信息在预设数据库中选取出对应相邻的两个基本电压矢量,并根据两个所述基本电压矢量计算出与所述逆变器适配的开关时间比例;
20、当获取到所述期望电压矢量幅值时,基于所述开关时间比例控制所述逆变器实时输出所述期望电压矢量幅值。
21、本发明实施例第二方面提出了一种电驱动系统控制系统,其中,所述系统包括:
22、第一计算模块,用于当接收到整车控制器下发的驱动指令时,根据所述驱动指令计算出与当前车辆内部的驱动电机对应的驱动参数,并通过pi控制器输出与所述驱动电机对应的电流指令;
23、第二计算模块,用于根据所述驱动参数以及所述电流指令计算出对应的期望电压矢量幅值,并根据所述车辆内部的驱动电池的实时输出电压以及逆变器的实时开关状态计算出能够用于所述驱动电机的最大电压矢量幅值;
24、判断模块,用于判断所述期望电压矢量幅值是否大于所述最大电压矢量幅值;
25、第一输出模块,用于若判断到所述期望电压矢量幅值大于所述最大电压矢量幅值,则判定进入过调制模式,并通过所述过调制模式中包含的第一调制策略对所述期望电压矢量幅值进行自适应调整,以使所述车辆内部的逆变器输出自适应调整后的期望电压矢量幅值。
26、其中,上述电驱动系统控制系统中,所述第一计算模块具体用于:
27、当获取到所述电流指令时,构建出与所述驱动电机适配的直轴以及交轴,并根据所述驱动参数计算出与所述直轴对应的第一期望电压分量、与所述交轴对应的第二期望电压分量;
28、将所述第一期望电压分量以及所述第二期望电压分量同时输入至预设坐标系中,以将所述第一期望电压分量转换成对应的第一矢量幅值、将所述第二期望电压分量转换成对应的第二矢量幅值;
29、对所述第一矢量幅值以及所述第二矢量幅值进行累加处理,以对应生成所述期望电压矢量幅值。
30、其中,上述电驱动系统控制系统中,计算出所述第一期望电压分量的表达式为:
31、vd_ref=rs×id_ref-p×ωr×ls×iq_ref
32、其中,vd_ref表示所述第一期望电压分量,rs表示相电阻,ls表示相电感,p表示极对数,id_ref-p和iq_ref均表示所述电流指令,ωr表示转子转速;
33、计算出所述第二期望电压分量的表达式为:
34、vq_ref=rs×iq_ref+p×ωr×(ls×id_ref+φf)
35、其中,vq_ref表示所述第二期望电压分量,rs表示相电阻,ls表示相电感,p表示极对数,iq_ref和id_ref均表示所述电流指令,φf表示永磁体磁链。
36、其中,上述电驱动系统控制系统中,所述第二计算模块具体用于:
37、实时读取出所述驱动电池的所述实时输出电压,并检测出所述逆变器的实时开关状态,所述实时开关状态是动态变化的;
38、根据所述实时开关状态确定出所述逆变器的实时工作状态,所述实时工作状态包含所述逆变器的工作扇区信息;
39、基于预设算法根据所述实时输出电压以及所述工作扇区信息计算出所述最大电压矢量幅值。
40、其中,上述电驱动系统控制系统中,所述电驱动系统控制系统还包括第二输出模块,所述第二输出模块具体用于:
41、若判断到所述期望电压矢量幅值小于所述最大电压矢量幅值,则判定进入正常调制模式,并通过所述正常调制模式中包含的第二调制策略获取到所述期望电压矢量幅值,以使所述车辆内部的逆变器输出所述期望电压矢量幅值。
42、其中,上述电驱动系统控制系统中,所述第二计算模块还具体用于:
43、根据所述第一期望电压分量、所述第二期望电压分量以及所述工作扇区信息在预设数据库中选取出对应相邻的两个基本电压矢量,并根据两个所述基本电压矢量计算出与所述逆变器适配的开关时间比例;
44、当获取到所述期望电压矢量幅值时,基于所述开关时间比例控制所述逆变器实时输出所述期望电压矢量幅值。
45、其中,上述电驱动系统控制系统中,所述电驱动系统控制系统还包括监测模块,所述监测模块具体用于:
46、实时监测所述逆变器输出的实际电压以及实际电流,并根据所述实际电压和所述实际电流逆向计算出所述驱动电机的实际电机转速以及实际电机转矩;
47、基于所述实际电机转速以及所述实际电机转矩生成对应的反馈指令,并根据所述反馈指令实时调整所述pi控制器内部的控制参数。
48、本发明实施例第三方面提出了一种计算机,包括存储器、处理器以及存储在所述存储器上并可在所述处理器上运行的计算机程序,其中,所述处理器执行所述计算机程序时实现如上面所述的电驱动系统控制方法。
49、本发明实施例第四方面提出了一种可读存储介质,其上存储有计算机程序,其中,该程序被处理器执行时实现如上面所述的电驱动系统控制方法。
50、本发明的附加方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本发明的实践了解到。
- 还没有人留言评论。精彩留言会获得点赞!