基于短时记忆与行为树的智能驾驶行人避让方法和系统与流程
本发明属于自动驾驶决策与规划,尤其涉及人车混流场景下的智能驾驶行人避让决策方法和系统。
背景技术:
1、随着汽车智能化技术的不断升级,智能驾驶技术被广泛应用于工业园区接驳、小区快递投递、城市道路辅助驾驶等任务。这些应用背景中都可能存在行人与车辆混行的情况。行人具有脆弱与碰撞代价高的特点,使得智能驾驶决策与规划的安全性变得尤其重要。
2、现有的行人避让决策与规划方法中,公开号为cn114379549a的中国专利《行人避让方法、装置及存储介质》提出了一种基于车辆与行人距离的行人避让方法,为了保证自车能够安全的避让行人,根据车辆速度在满足一定预设避让速度的情况下执行避让行人动作;该方法没有考虑行人的意图,对于行人横穿马路的情况极有可能避让失败。
3、公开号为cn114379587a的中国专利《自动驾驶中避让行人的方法与装置》中则结合信号灯状态与行人运动方向角度值来得到行人的运动意图,使车辆能够更加合理地避让横穿马路的行人。但是,该方法对行人意图估计的有效性非常依赖交通信号灯信息,无法用于没有交通灯的工业园区、住宅小区、乡村道路以及部分老旧街道等更加复杂的行驶场景,同时行人的行为具有机动性强、不确定性高、难以实时预测等特点,因此对行人行为意图进行有效的估计是提升人车混行场景下智能驾驶有效性与安全性的重要前提。
技术实现思路
1、本发明要看克服现有方法的上述不足,提供一种基于短时记忆与行为树的智能驾驶行人避让方法和系统。
2、基于短时记忆与行为树的智能驾驶行人避让方法,包含以下步骤:
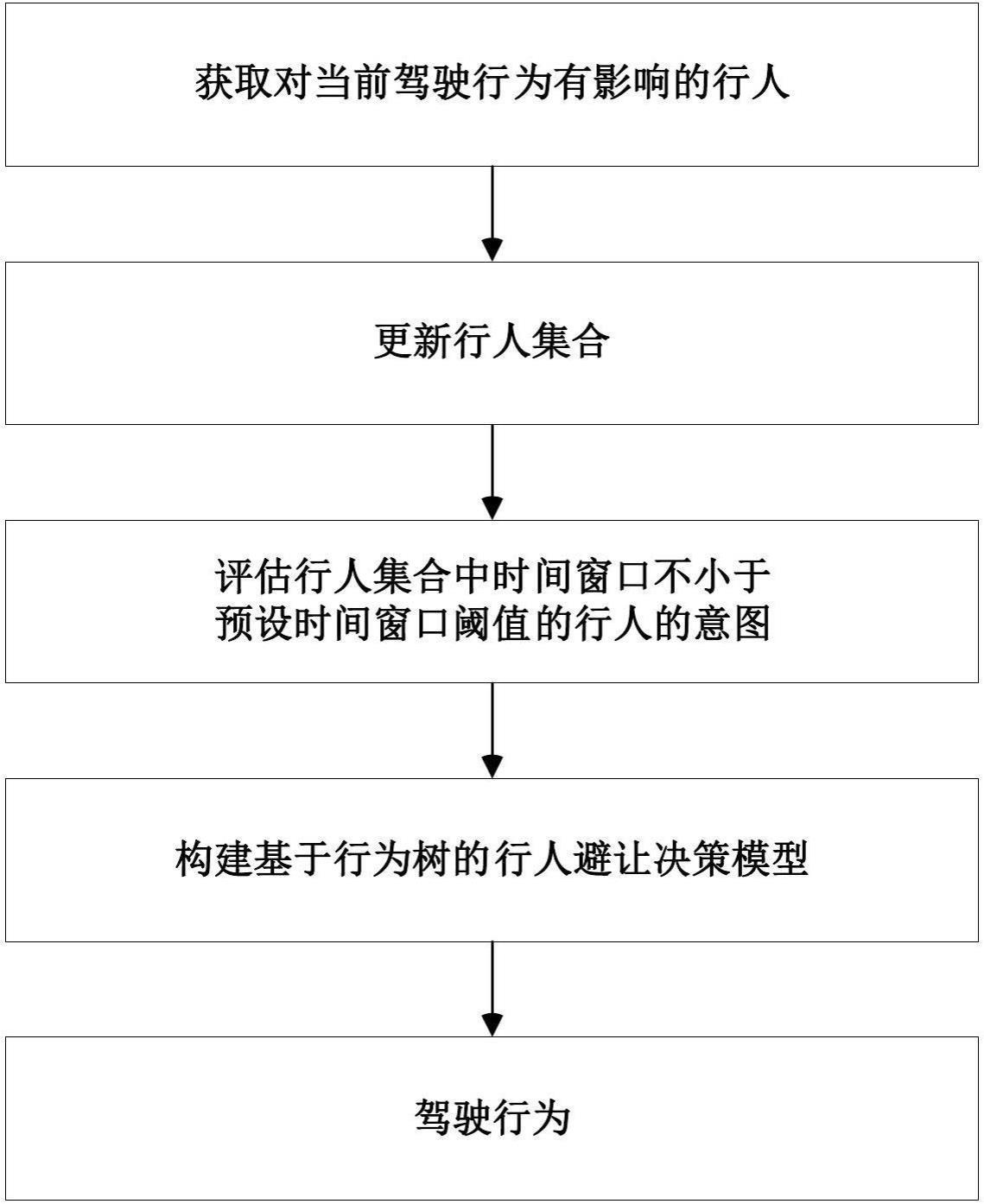
3、s1 在目标车辆行驶过程中,获取对当前驾驶行为有影响的行人状态信息和目标车辆周围环境信息;
4、s2 基于获取的行人状态,更新行人集合;
5、s3 评估行人集合中时间窗口不小于预设时间窗口阈值的行人的意图;
6、s4 根据预构建的基于行为树的行人避让决策模型确定当前应对行人驾驶行为。
7、进一步,步骤s1中对当前驾驶行为有影响的行人,指的是目标车辆当前所在道路前方预定范围内的行人
8、进一步,步骤s1中行人状态信息包括行人位置,行人速度。
9、进一步,,步骤s2中基于获取的行人状态,更新行人集合,指的是对每个目标行人维护一个先进先出的队列q,最大长度为n,用来存储目标行人的状态信息,将目标行人的当前状态数据存储到队列q中,其中长度n由预设时间窗口阈值确定;若长时间没有获得目标行人新的状态信息,则丢弃目标行人的队列。
10、进一步,,步骤s3中评估行人的意图,具体包括以下子步骤:
11、(1)获取目标行人的状态信息队列q中的第一个状态数据p0和其它各状态数据pt,其中t=1,…,n-1;
12、(2)计算行人在状态pt, t=1,…,n-1相对p0处的位移向量vt, t=1,…,n-1;
13、(3)利用上述计算的位移向量的线性组合估计行人的移动方向v=vtw,其中,v=[v1,v2, …, vn-1]t ,w=[w1,w2, …,wn-1]t表示线性系数向量;
14、(4)获取目标行人所在道路朝向h;
15、(5)计算目标行人所在道路朝向h与行人移动方向v之间夹角的角度值a;
16、(6)若角度值a满足预设的行人横穿马路夹角阈值时,将横穿马路作为目标行人的行为意图,否则将沿道路行走作为目标行人的行为意图。
17、进一步,步骤s4中预构建的行为树,包括控制节点和执行节点,所述控制节点包括回退节点fb,执行节点包括条件节点c1,条件节点c2,条件节点c3,动作节点a1,动作节点a2和动作节点a3;
18、进一步,条件节点c1的判断逻辑为存在行人的意图为横穿马路,当条件判断为真则执行动作节点a1,条件节点c1返回成功给回退节点fb;
19、c2的判断逻辑为存在没有时间窗口小于预设时间窗口阈值的行人且目标车辆周围环境允许绕行,当条件判断为真则执行动作节点a2,条件节点c2返回成功给回退节点fb;
20、c3的判断逻辑为真,执行动作节点a3,条件节点c3返回成功给回退节点fb;
21、动作a1的执行逻辑为让行的驾驶行为;
22、动作a2的执行逻辑为绕行的驾驶行为;
23、动作a3的行为决策为保守的驾驶行为。
24、进一步,所述的让行的驾驶行为指的是能够保证车辆与行人有预定安全距离,且速度符合舒适性约束,停车等候行人过马路的驾驶行为;
25、所述的执行绕行的驾驶行为指的是能够保证安全的超过行人的驾驶行为;
26、所述的执行保守的驾驶行为指的是与行人保持预定安全距离的驾驶行为。
27、进一步,控制节点和执行节点的工作过程包括:
28、回退节点从左到右轮询子节点,直至找到返回成功的子节点返回给父节点,当所有的子节点都返回失败时,返回失败给父节点;
29、条件节点检查自身条件,如果条件是真,返回成功,否则返回失败;
30、动作节点执行命令,返回成功。
31、实施本发明的一种基于短时记忆与行为树的智能驾驶行人避让方法的系统,包含:
32、信息获取模块,用于在目标车辆行驶过程中,获取对当前驾驶行为有影响的行人状态信息和目标车辆周围环境信息;
33、行人集合更新模块,基于获取的行人状态,更新行人集合;
34、行人意图评估模块,用于评估行人集合中时间窗口不小于预设时间窗口阈值的行人的意图;
35、行人驾驶行为确定模块,根据预构建的基于行为树的行人避让决策模型确定当前应对行人驾驶行为。
36、本发明还涉及一种计算机可读存储介质,其上存储有程序,该程序被处理器执行时,实现本发明的一种基于短时记忆与行为树的智能驾驶行人避让方法。
37、本发明还涉及一种计算设备,包括存储器和处理器,其中,所述存储器中存储有可执行代码,所述处理器执行所述可执行代码时,实现本发明的一种基于短时记忆与行为树的智能驾驶行人避让方法。
38、本发明的方法在避让行人决策时引入了短时记忆与行为树模型,在发现行人后的一段时间范围内先执行保守驾驶行为对行人意图进行观察,再进行行人避让决策,能够保证行人绝对安全的前提下,同时保证智能驾驶车辆在人流中更高效率的通行。相比现有方法中发现目标行人后立即评估意图进行行为决策切换,本发明引入了类人的观察方法即在预设时间窗口内持续评估行人意图,而后再调整行为决策,更好的保证了行人意图判断的准确性和行为决策的稳定性与有效性。
39、本发明的优点是:通过引入类似人类驾驶员的观察与评估过程,仅依赖行人历史状态信息对行人的意图进行更加准确的估计;同时,类人的驾驶场景观察与评估过程也能让智能驾驶车辆在复杂的环境下具有更富余的决策与规划时间,在提升行车效率的同时保证行人的安全;此外,基于行为树构建行人避让决策模型,简化了各驾驶行为的切换逻辑,进一步提高了决策系统的可解释性与可靠性。
- 还没有人留言评论。精彩留言会获得点赞!