一种车辆自动驾驶控制方法及控制系统与流程
本发明涉及自动驾驶,特别涉及一种车辆自动驾驶控制方法及控制系统。
背景技术:
1、随着科技的飞速发展,智能车辆作为未来汽车行业的重要发展方向,引起了广泛的关注。自动驾驶技术的不断进步和应用,为人们的出行带来了巨大的变革和便利。自动驾驶车辆可以提高出行的便利性和舒适性,解放驾驶员的双手,让他们有更多时间进行其他有意义的活动,同时还可以减少交通事故和拥堵,提升交通运输效率。
2、然而,自动驾驶车辆的安全性仍然是当前需要解决的主要挑战之一。在影响自动驾驶车辆安全性的因素中,自动驾驶车辆的决策与控制是最关键的因素之一,直接影响其安全性和合理性。自动驾驶车辆的决策与控制涉及对丰富的环境信息进行实时感知和准确判断,同时在复杂的交通场景中做出明智的决策和精确的控制。因此,提高自动驾驶车辆决策与控制的灵敏度和准确性成为实现自动驾驶安全的关键任务。
3、目前的自动驾驶系统在数据储存和处理能力上仍存在局限性。通常采用相对简单的算法模型对车辆的行驶信息和环境信息进行处理和决策,但其运算精度、广度和深度受到一定的限制。这可能导致系统对复杂情况的处理能力有限,从而影响了决策指令的准确性和对复杂交通环境的适应性,进而影响了自动驾驶车辆的安全性。
4、为了提高自动驾驶车辆的安全性,需要不断加强对感知、决策和控制等关键技术的研发和优化。
技术实现思路
1、有鉴于此,本发明实施例的目的在于提供一种车辆自动驾驶控制方法及控制系统,能够提高车辆的安全性、性能和效率,实现高度自动化驾驶,为未来智能交通和出行带来更多便利和可持续发展。
2、第一方面,本发明实施例提供了一种车辆自动驾驶控制方法,其中,包括:
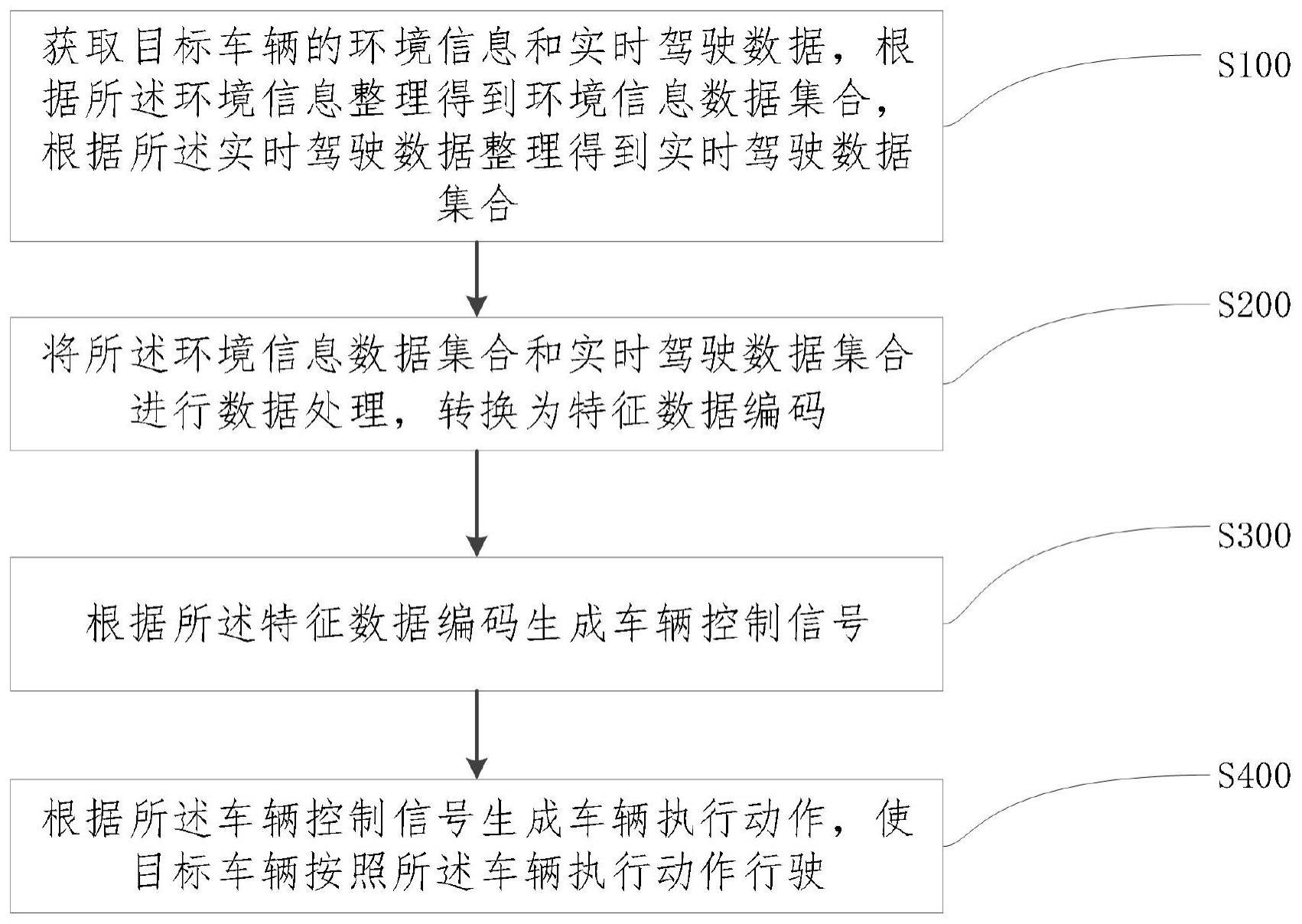
3、获取目标车辆的环境信息和实时驾驶数据,根据所述环境信息整理得到环境信息数据集合,根据所述实时驾驶数据整理得到实时驾驶数据集合;
4、将所述环境信息数据集合和实时驾驶数据集合进行数据处理,转换为特征数据编码;
5、根据所述特征数据编码生成车辆控制信号;
6、根据所述车辆控制信号生成车辆执行动作,使目标车辆按照所述车辆执行动作行驶。
7、结合第一方面,本发明实施例提供了第一方面的第一种可能的实施方式,其中,所述获取目标车辆的环境信息和实时驾驶数据,根据所述环境信息整理得到环境信息数据集合,根据所述实时驾驶数据整理得到实时驾驶数据集合,包括:
8、使用车载传感器获取目标车辆周围的环境信息;
9、从车辆的系统中获取目标车辆的实时驾驶数据;
10、对所述环境信息和所述实时驾驶数据进行数据格式统一;
11、将格式统一后的所述环境信息和所述实时驾驶数据进行坐标系转换操作,映射到全局地图坐标系;
12、将所述环境信息和所述实时驾驶数据进行时间戳校准,使相同时间点对应同一时刻的数据,得到按时间顺序排序的环境信息数据集合和实时驾驶数据集合。
13、结合第一方面,本发明实施例提供了第一方面的第二种可能的实施方式,其中,所述将所述环境信息数据集合和实时驾驶数据集合进行数据处理,转换为特征数据编码,包括:
14、从所述环境信息数据集合和实时驾驶数据集合中进行交通特征提取,所述交通特征包括车辆周围障碍物的距离、车辆相对速度、车道线的位置和类型、交通信号灯状态、车辆速度、车辆加速度、车辆转向角度中的至少一种;
15、将所述交通特征进行组合,形成高级别交通特征;
16、将所述高级别交通特征进行编码,得到特征数据编码。
17、结合第一方面,本发明实施例提供了第一方面的第三种可能的实施方式,其中,所述根据所述特征数据编码生成车辆控制信号包括:
18、将所述特征数据编码进行解码,得到相应的高级别交通特征;
19、基于解码后的高级别交通特征,采用自动驾驶决策算法,生成车辆控制信号。
20、结合第一方面,本发明实施例提供了第一方面的第四种可能的实施方式,其中,所述根据所述车辆控制信号生成车辆执行动作,使目标车辆按照所述车辆执行动作行驶,包括:
21、将所述车辆控制信号转化为实际的车辆执行指令,所述车辆执行指令包括转向指令、加速度指令和刹车指令中的至少一种;
22、根据所述目标车辆的具体配置和系统,将所述车辆执行指令转换为相应的车辆执行动作,发送至所述目标车辆的执行机构,使所述目标车辆按照所述车辆执行指令行驶。
23、第二方面,本发明实施例还提供了一种车辆自动驾驶控制系统,其中,包括:
24、数据获取模块,用于获取目标车辆的环境信息和实时驾驶数据,根据所述环境信息整理得到环境信息数据集合,根据所述实时驾驶数据整理得到实时驾驶数据集合;
25、数据处理模块,用于将所述环境信息数据集合和实时驾驶数据集合进行数据处理,转换为特征数据编码;
26、决策模块,用于根据所述特征数据编码生成车辆控制信号;
27、执行模块,用于根据所述车辆控制信号生成车辆执行动作,使目标车辆按照所述车辆执行动作行驶。
28、结合第二方面,本发明实施例提供了第二方面的第一种可能的实施方式,其中,所述数据获取模块包括:
29、外部传感器单元,用于获取目标车辆周围的环境信息;
30、内部驾驶数据获取单元,用于从车辆的系统中获取目标车辆的实时驾驶数据;
31、数据格式统一单元,用于对所述环境信息和所述实时驾驶数据进行数据格式统一;
32、坐标系转换单元,用于将格式统一后的所述环境信息和所述实时驾驶数据进行坐标系转换操作,映射到全局地图坐标系;
33、时间戳校准单元,用于将所述环境信息和所述实时驾驶数据进行时间戳校准,使相同时间点对应同一时刻的数据,得到按时间顺序排序的环境信息数据集合和实时驾驶数据集合。
34、结合第二方面,本发明实施例提供了第二方面的第二种可能的实施方式,其中,所述数据处理模块包括:
35、特征提取单元,用于从所述环境信息数据集合和实时驾驶数据集合中进行交通特征提取,所述交通特征包括车辆周围障碍物的距离、车辆相对速度、车道线的位置和类型、交通信号灯状态、车辆速度、车辆加速度、车辆转向角度中的至少一种;
36、特征组合单元,用于将所述交通特征进行组合,形成高级别交通特征;
37、特征编码单元,用于将所述高级别交通特征进行编码,得到特征数据编码。
38、结合第二方面,本发明实施例提供了第二方面的第三种可能的实施方式,其中,所述决策模块包括:
39、解码单元,用于将所述特征数据编码进行解码,得到相应的高级别交通特征;
40、控制信号生成单元,用于基于解码后的高级别交通特征,采用自动驾驶决策算法,生成车辆控制信号。
41、结合第二方面,本发明实施例提供了第二方面的第四种可能的实施方式,其中,所述执行模块包括:
42、指令转换单元,用于将所述车辆控制信号转化为实际的车辆执行指令,所述车辆执行指令包括转向指令、加速度指令和刹车指令中的至少一种;
43、执行处理单元,用于根据所述目标车辆的具体配置和系统,将所述车辆执行指令转换为相应的车辆执行动作,发送至所述目标车辆的执行机构,使所述目标车辆按照所述车辆执行指令行驶。
44、本发明实施例的有益效果是:
45、本发明通过获取目标车辆的环境信息和实时驾驶数据,并将其转换为特征数据编码,可以更全面、准确地感知周围环境和交通状况,基于获得的数据,自动驾驶系统可以更智能地做出决策,避免潜在的危险情况,提高车辆的安全性。
46、本发明通过将环境信息和实时驾驶数据转换为特征数据编码,更高效地进行数据处理和决策制定,提升车辆的驾驶性能,使车辆行驶更加稳定、平滑,提升乘客的乘坐舒适度。
47、本发明实现了高度自动化,通过自动驾驶控制方法,目标车辆可以在不需要人工干预的情况下自主行驶,实现高度自动化驾驶,带来了更加便利和舒适的出行体验,让驾驶员从繁琐的驾驶任务中解放出来。
48、本发明的自动驾驶控制方法的智能决策和高效控制能力,可以降低交通事故的发生率,车辆能够及时感知和避免潜在的危险,减少人为驾驶错误造成的事故,提高道路交通的安全性。
49、本发明的自动驾驶车辆能够更精准地控制车辆速度和跟车距离,避免急刹车和加速,减少交通拥堵现象,车辆之间可以更好地协同行驶,提高交通的整体效率,缩短行驶时间。
- 还没有人留言评论。精彩留言会获得点赞!