一体式传感器支架、组合传感器及自动驾驶设备的制作方法
本技术涉及多传感器融合,尤其涉及一种一体式传感器支架、组合传感器和自动驾驶设备。
背景技术:
1、当下,自动驾驶及高级辅助驾驶技术蓬勃发展,自动驾驶系统对周围环境的信息收集能力对车辆安全至关重要,自动泊车、公路巡航控制和自动紧急制动等自动驾驶汽车功能很大程度上依靠传感器来实现。由于单一传感器获得的信息非常有限,因此目前多种自动驾驶方案的实现通常需要依赖于不同类型的传感器,采用多种传感器功能互补的方式进行环境感知,以满足探测和数据采集的需要。在一个示例中,汽车的辅助系统搭载了摄像头、毫米波雷达以及激光雷达等多种传感器,相对于独立传感器的方案,多传感器的使用可以做出帮助计算机或者驾驶员做出更安全的决策。
2、多传感器融合是利用计算机技术将来自多传感器或多源的信息和数据以一定的准则进行自动分析和综合,以完成所需的决策和估计而进行的信息处理过程。然而,由于各个传感器的数据特征、视场角fov(field of view)以及测距精度均不相同,在车辆周围加装多种传感器时,会出现不同类型的传感器因为安装位置差异较大导致视角差较大的问题。此外,由于不同区域的颠簸情况不同,运行过程中不同位置的传感器之间的外参也随着颠簸发生变化。这不仅在算法上为后续融合算法造成困难,也没有充分发挥多传感器的优势。
技术实现思路
1、本技术实施例旨在提供一体式传感器支架、组合传感器及自动驾驶设备,以改善当前不同传感器之间视野差较大和外参变化的问题。
2、第一方面,本技术实施例提供了一种一体式传感器支架,包括摄像头支架、集成支架和安装底板;所述摄像头支架包括第一固定板和第一连接板,所述第一固定板的一端与所述第一连接板的一端连接;所述集成支架包括横梁和集成板,所述横梁的一端和所述集成板垂直连接;所述安装底板包括第二固定板,所述第二固定板与所述集成支架连接;所述集成板上设置有定位销,用于固定传感器;所述横梁上开设有多个限位孔,所述横梁在所述集成板上的投影被所述集成板的边缘中点与所述定位销的中心的连线垂直平分;所述摄像头支架与所述集成支架刚性连接,所述集成支架与所述安装底板刚性连接。
3、在一个实施例中,所述第一固定板上设置有摄像头限位孔,所述第一连接板上设置有调位导向孔,所述第一连接板与所述集成支架连接。
4、在一个实施例中,所述调位导向孔为弧形的长条孔,所述调位导向孔的圆心夹角的取值在50°至80°的角度区间内。调位导向孔的设置使摄像头支架具有了旋转自由度,安装时可根据实际需要调整摄像头的俯仰角、偏航角或横滚角,使摄像头与其他传感器之间的视角差尽可能小,提高数据融合精度。
5、在一个实施例中,所述集成支架上每个安装位点设置有至少两个限位孔用于固定所述摄像头支架和传感器。通过使用多个孔位进行安装,可以将载荷均匀地分散到多个支撑点上,这样可以减少局部应力,增加固定的接触面积和摩擦力,从而提高了支撑稳定性并降低了因单点集中载荷而引起的损坏风险。
6、在一个实施例中,所述刚性连接包括螺栓螺母连接、焊接连接、强胶黏剂连接或搭接连接。刚性连接能提供足够的支撑来抵抗外界力和振动的影响,有效减少传感器位置的偏移或参数的变化,保证传感器结构的稳定性。
7、在一个实施例中,所述横梁为矩形钣金件,所述横梁和所述集成板是一体式结构件或所述横梁和所述集成板是刚性连接的分体式结构件。
8、在一些实施例中,所述多个限位孔成矩阵排布,其中,至少两对所述限位孔之间的距离相等。这样的设计提供了更大的灵活性和调节能力,不同的孔位组合可以满足不同的安装需求,通过选择适当的孔洞进行固定,可实现传感器位置和方向的微调。
9、在一些实施例中,所述一体式传感器支架为铝合金,镁合金或钛合金。上述材料具有轻量化、高强度、耐腐蚀、导热良好等优势,这些特点适配传感器支架需要稳定、耐用和轻质化的应用场景。
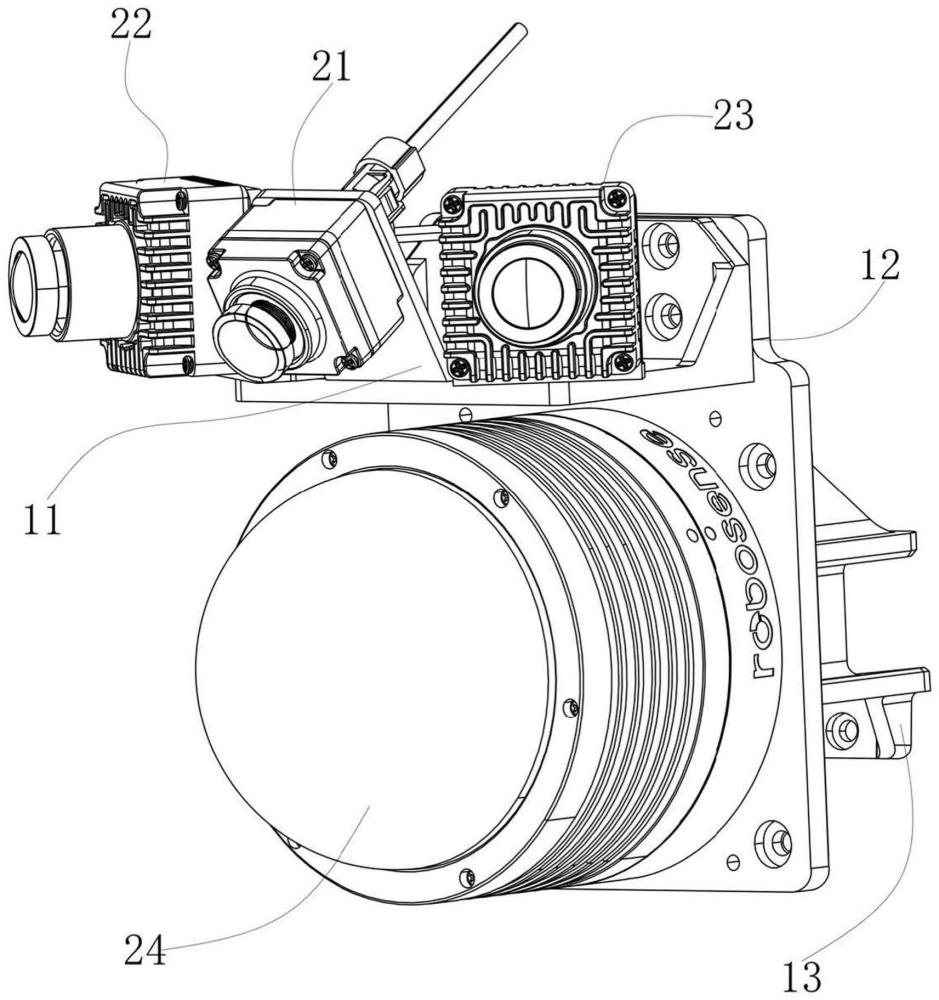
10、第二方面,本技术实施例提供了一种组合传感器,包括多种传感器,用于获取环境信息,其中,所述多种传感器中,至少两种传感器的视场角重叠或部分重叠;所述多种传感器中包括一个摄像头和一个激光雷达,其中,所述摄像头的焦点与所述激光雷达的激光发射器中心距离小于预设值;所述多种传感器包括一个惯性测量单元,所述惯性测量单元的中心与所述激光雷达的中心在水平方向上共线,或所述惯性测量单元的中心与所述激光雷达的中心在垂直方向上共线;一体式传感器支架,用于集成所述多种传感器;所述多种传感器与所述一体式传感器支架刚性连接。
11、在一些实施例中,所述传感器还包括毫米波雷达、超声波雷达、红外传感器。
12、在一些实施例中,所述刚性连接包括螺栓螺母连接、焊接连接、强胶黏剂连接或搭接连接。
13、第三方面,本技术还提出一种自动驾驶设备,该自动驾驶设备包括识别模块、本体和一体式组合传感器。所述识别模块包括激光雷达组件、摄像头组件、毫米波雷达组件或实时动态差分测量系统;所述本体包括驱动机构和控制器,驱动机构用于驱动所述本体移动,控制器与识别模块电连接;所述一体式组合传感器包括一体式传感器支架和传感器,所述传感器固定在所述一体式传感器支架上,所述一体式传感器支架安装在所述本体上。其中,自动驾驶设备可以是汽车、轮船、飞行器等,对此不作限制。
14、在一些实施例中,所述激光雷达组件包括:顶激光雷达,用于对所述本体进行全方位探测;顶前向激光雷达,用于对所述设备本体前方的障碍物进行探测;环视激光雷达,用于对所述设备本体近场盲区进行探测。
15、在一些实施例中,摄像头组件包括前视长焦摄像头,用于获取所述设备本体前方远距离目标的视觉信息;前视广角摄像头,用于获取所述设备本体前方的视觉信息,增加视野范围;侧前视摄像头,用于获取所述设备本体前部侧面的视觉信息;侧后视摄像头,用于获取所述设备本体后部侧面的视觉信息;后视摄像头,用于获取所述设备本体后部的视觉信息;鱼眼摄像头,用于减小盲区、提供全景视野。不同视场角的摄像头组合在一起可以提供更广阔的视野范围和更丰富的图像信息,实现全方位的环境感知。
16、在一些实施例中,摄像头组件具有6级防尘能力和7级防水能力。这表明摄像头组件能够有效阻止灰尘、细颗粒物、碎屑等进入,并可以在短时间内浸没在水中而不受损。极高的防尘能力可以保持摄像头镜头清晰,提供质量稳定的图像;较高的防水能力可以防止雨水或其他液体渗入内部,使摄像头能够在雨天、潮湿环境或水下环境中长时间工作。这两项能力增强了摄像头组件的耐用性和可靠性,使其能够适应恶劣环境和更多应用场景。
17、本技术公开的一体式传感器支架结构和组合传感器的布局及配置实现了多传感器之间视角差异的最小化。组合传感器中传感器与支架刚性连接并安装惯性测量单元,从硬件与算法两方面解决了由于抖动导致的外参变化的问题。因此本发明提出的一体式传感器支架、组合传感器及自动驾驶设备有利于提高多传感器数据融合精度,获得更可靠和准确的数据融合结果,从而增强环境感知和障碍物识别能力,提高定位和导航精度。
- 还没有人留言评论。精彩留言会获得点赞!