一种协调自适应巡航与车身稳定性的博弈均衡控制系统
本发明涉及汽车智能交互以及车辆自动驾驶安全技术,确切地说是一种协调自适应巡航与车身稳定性的博弈均衡控制系统,用于改善车辆在自适应巡航过程中自适应巡航系统与车身稳定性控制系统之间的控制目标及决策冲突,提高车辆的行车安全性。
背景技术:
1、随着各种智能驾驶辅助技术的发展,自动驾驶中动力学稳定性面临的新问题成为研究的又一难点和热点。车辆在进行纵向动力学控制时,若遇到对开路面等路面条件十分恶劣的情况,车辆极易发生侧滑或侧翻的失稳状况,造成严重的人员伤亡以及经济损失。作为车辆安全稳定运行的关键,车辆车身稳定性控制系统在车辆安全稳定运行中起到了关键性作用。然而,车辆车身稳定性控制系统的控制决策却会严重影响车辆自适应巡航控制系统的性能。为此,本发明提出一种协调自适应巡航与车身稳定性的博弈均衡控制系统改善车辆车身稳定性控制系统与车辆自适应巡航控制系统之间的控制目标及决策冲突,提高车辆在实际行驶过程中的安全性。
技术实现思路
1、本发明的目的在于提供一种协调自适应巡航与车身稳定性的博弈均衡控制系统来解决上述技术问题。
2、为了解决上述技术问题,本发明具体技术方案如下:
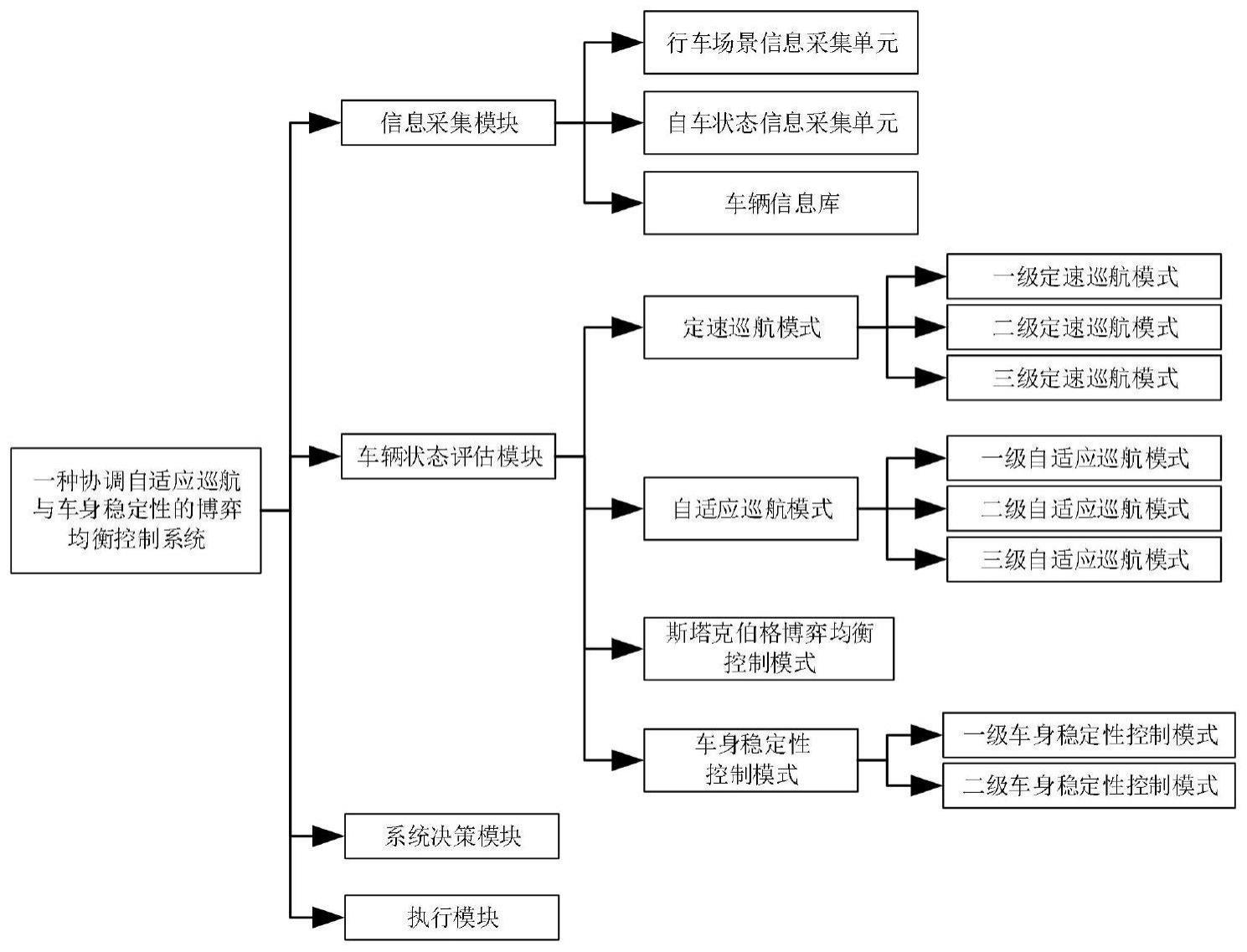
3、一种协调自适应巡航与车身稳定性的博弈均衡控制系统,包括信息采集模块、车辆状态评估模块、系统决策模块、执行模块。
4、所述信息采集模块包括行车场景采集单元、自车状态信息采集单元、车辆信息库,其中行车场景信息采集单元包括一个双目摄像头、一个毫米波雷达、一个激光雷达,所述双目摄像头、毫米波雷达、激光雷达分别安装于汽车的车内后视镜下方、前保险杠中部、前挡风玻璃上部,用于采集前方跟踪车辆信息、周车与场景信息,所述前方跟踪车辆信息包括前方跟踪车辆纵向车速、前方跟踪车辆纵向加速度、自车与前方跟踪车辆相对距离、自车与前方跟踪车辆相对速度,所述周车与场景信息包括行驶路面等级、当前车道以及周围车道车辆密度等级、天气状况等级;所述自车状态信息采集单元包括四个光电轮速传感器和一个惯性测量单元,所述四个光电轮速传感器分别安装在四个车轮轮毂上,所述惯性测量单元安装在车辆底盘中央,分别用于采集和估计车轮轮速、车辆纵向车速、车厢侧倾角、车辆纵向加速度、质心侧偏角、非簧载质量侧倾角。
5、所述车辆状态评估模块利用信息采集模块采集到的行车场景信息与自车状态信息判断当前车辆控制模式,车辆控制模式包括定速巡航模式、自适应巡航模式、斯塔克伯格博弈均衡控制模式、车身稳定性控制模式;所述定速巡航模式包括一级定速巡航模式、二级定速巡航模式、三级定速巡航模式,通过计算定速巡航因子来判断车辆所处几级定速巡航模式;所述自适应巡航模式包括一级自适应巡航模式、二级自适应巡航模式、三级自适应巡航模式,通过计算自适应巡航因子来判断车辆所处几级自适应巡航模式;所述车身稳定性控制模式包括一级车身稳定性控制模式、二级车身稳定性控制模式,通过计算车身稳定性因子来判断车辆所处斯塔克伯格博弈均衡控制模式或车身稳定性控制模式。
6、若当前车道前方无可跟踪车辆,所述车辆状态评估模块判断车辆进入定速巡航模式,计算定速巡航因子τd来判断车辆所处定速巡航模式,定速巡航因子τd可根据以下公式计算:
7、τd=(μrkμd+ρlskρlsd+aftkaftd+χdkχd)kτd,
8、式中,kμd、kρlsd、kaftd、kχd为加权系数,kμd+kρlsd+kaftd+kχd=1,μr表示行驶路面等级,当行驶于湿滑沥青或水泥路面,μr=0.45,当行驶于干燥沥青或水泥路面时,μr=0.95;ρls表示当前车道以及周围车道车辆密度等级,其值取决于当前车道车辆密度等级和周围车道车辆密度等级,ρls=ρlkρl+ρskρs,式中,kρl、kρs为加权系数,kρl+kρs=1,ρl表示当前车道车辆密度等级,根据每小时车流量分为低密度等级、中低密度等级、中密度等级、中高密度等级,每小时车流量小于100辆时,当前车道车辆密度等级为低密度等级,ρl=0.9,每小时车流量在100~200辆之间时,当前车道车辆密度等级为中低密度等级,ρl=0.65,每小时车流量在200~300辆之间时,当前车道车辆密度等级为中密度等级,ρl=0.4,每小时车流量在300~400辆之间时,当前车道车辆密度等级为中高密度等级,ρl=0.15;ρs表示周围车道车辆密度等级,同样根据每小时车流量分为低密度等级、中低密度等级、中密度等级、中高密度等级,每小时车流量小于100辆时,周围车道车辆密度等级为低密度等级,ρl=0.95,每小时车流量在100~200辆之间时,周围车道车辆密度等级为中低密度等级,ρl=0.7,每小时车流量在200~300辆之间时,周围车道车辆密度等级为中密度等级,ρl=0.45,每小时车流量在300~400辆之间时,周围车道车辆密度等级为中高密度等级,ρl=0.2,;aft表示天气状况等级,其值取决于风力等级与天气现象,afkaf+atkat,式中,kaf、kat为加权系数,kaf+kat=1,af表示风力等级,当风力为0-2级风时,af=0.95,当风力为3-4级风时,af=0.55,当风力为5-6级风时,af=0.15,at表示天气现象,晴天时,at=0.8,阴天时,at=0.6,小雨或轻微雾霾天时,at=0.4,中雨或中度雾霾天时,at=0.2;χd表示车辆刹停能力等级,其值取决于车辆100km/h刹车停止距离,当车辆100km/h刹车停止距离小于35米,χd=0.8,当车辆100km/h刹车停止距离大于35米但小于50米,χd=0.6,当车辆100km/h刹车停止距离大于50米但小于100米,χd=0.4,当车辆100km/h刹车停止距离大于100米,χd=0.2;kτd为定速巡航因子τd的权衡因子,当行驶路面等级为冰雪路面、当前车道或周围车道每小时车流量在400~600辆之间时、风力为7-12级风时、暴雨、重度雾霾或雨雪天时,kτd=0,其他行车场景工况时,kτd=1。
9、若定速巡航因子τd满足0<τd≤0.3,车辆状态评估模块判断车辆处于一级定速巡航模式,若定速巡航因子τd满足0.3<τd≤0.6,车辆状态评估模块判断车辆处于二级定速巡航模式,若定速巡航因子τd满足τd>0.6,车辆状态评估模块判断车辆处于三级定速巡航模式,若定速巡航因子τd=0,车辆状态评估模块强制车辆退出定速巡航模式;当车辆处于一级定速巡航模式,巡航车速vτd=40+5ωτd+5ρls,当车辆处于二级定速巡航模式,巡航车速vτd=60+10ωτd+10ρls,当车辆处于三级定速巡航模式,巡航车速vτd=100+10ωτd+10ρls,其中ωτd是供驾驶员选择的定速巡航调节因子,ωτd共分为等级a、b、c、d、e五级,对应具体数值为1、0.5、0、-0.5、1。
10、若当前车道前方存在可跟踪车辆,所述车辆状态评估模块判断车辆进入自适应巡航模式,计算自适应巡航因子来判断车辆所处自适应巡航模式,自适应巡航因子可根据以下公式计算:
11、τz=(μrkμz+ρlskρlsz+aftkaftz+χadkχadz)kτz,
12、式中,kμz、kρlsz、kaftz、kχadz为加权系数,kμz+kρlsz+kaftz+kχadz=1,μr、ρls、aft表示含义与上述相同,χad表示车辆性能等级,其值取决于车辆0-100km/h加速时间、100km/h刹车停止距离,χad=χakχa+χdkχd,式中,kχa、kχd为加权系数,kχa+kχd=1,χa表示车辆0-100km/h加速时间,当车辆0-100km/h加速时间小于5秒,χa=0.9,当车辆0-100km/h加速时间大于5秒但小于12秒,χa=0.6,当车辆0-100km/h加速时间大于12秒,χa=0.3,χd表示车辆100km/h刹车停止距离,表示含义与上述相同;kτz为自适应巡航因子τz的权衡因子,当行驶路面等级为冰雪路面、当前车道或周围车道每小时车流量在400~600辆之间时、风力为7-12级风时、暴雨、重度雾霾或雨雪天时,kτz=0,其他行车场景工况时,kτz=1。
13、若自适应巡航因子τz满足0<τz≤0.3,车辆状态评估模块判断车辆处于一级自适应巡航模式,若自适应巡航因子τz满足0.3<τz≤0.6,车辆状态评估模块判断车辆处于二级自适应巡航模式,若自适应巡航因子τz满足τz>0.6,车辆状态评估模块判断车辆处于三级自适应巡航模式,若自适应巡航因子τz=0,车辆状态评估模块强制车辆退出自适应巡航模式。
14、所述系统状态评估模块通过计算车身稳定性因子τs判断车辆为斯塔克伯格博弈均衡控制模式或车身稳定性控制模式,车身稳定性因子τs可根据以下公式计算:
15、
16、
17、式中,kβ、kφ、kφu为加权系数,kβ+kφ+kφu=1,kτs为车身稳定性因子τs的权衡因子,kτs0为车身稳定性因子τs的调节因子,τs0为计算的初始车身稳定性因子,τs为归一化后的最终的车身稳定性因子,β表示车辆质心侧偏角,单位为deg,φ表示车厢侧倾角,单位为deg,φu表示非簧载质量侧倾角,单位为deg。
18、车身稳定性因子τs满足0≤τs≤0.2,车辆状态评估模块判断车辆处于定速巡航模式或自适应巡航模式;若车身稳定性因子τs满足0.2<τs≤0.4,车辆状态评估模块判断车辆处于斯塔克伯格博弈均衡控制模式;若车身稳定性因子τs满足0.4<τs≤0.6,车辆状态评估模块判断车辆处于一级车身稳定性控制模式;若车身稳定性因子τs满足τs>0.6,车辆状态评估模块判断车辆处于二级车身稳定性控制模式。
19、当车辆处于自适应巡航控制模式,系统决策模块建立车辆自适应巡航模型,利用模型预测控制算法计算最优纵向加减速度,其模型预测控制算法中的非负权重矩阵根据自适应巡航因子τz获取,若车辆处于一级自适应巡航模式,即0<τz≤0.3,若车辆处于二级自适应巡航模式,即0.3<τz≤0.6,若车辆处于三级自适应巡航模式,即τz>0.6,式中,为非负权重矩阵的加权系数,和
20、为非负权重矩阵的权衡因子。
21、当车辆处于斯塔克伯格博弈均衡控制模式,系统决策模块建立车辆自适应巡航与稳定性博弈控制模型,利用模型预测控制算法计算自适应巡航控制与车身稳定性控制之间的斯塔克伯格博弈均衡,即计算最优纵向加减速度与最优纵向轮胎力,其中算法中的非负权重矩阵和[γβ,γφ,γφu]根据自适应巡航因子τz和车身稳定性因子τs获取,式中,为非负权重矩阵和[γβ,γφ,γφu]的加权系数,γβ0、γφ0、γφu0为非负权重矩阵[γβ,γφ,γφu]的权衡因子。
22、当车辆处于车身稳定性控制模式,系统决策模块建立车身稳定性控制模型,利用模型预测控制算法计算最优纵向轮胎力,其模型预测控制算法中的非负权重矩阵[γβ,γφ,γφu]根据车身稳定性因子τs获取,若车辆处于一级车身稳定性控制模式,即0.3<τs≤0.6,若车辆处于二级车身稳定性控制模式,即τs>0.6,式中,为非负权重矩阵[γβ,γφ,γφu]的加权系数,
23、所述执行模块根据系统决策模块计算出的决策得到最终期望轮胎力,实现车辆的安全行驶。
24、当车辆处于自适应巡航控制模式,系统决策模块包括以下内容:
25、s1.1、建立车辆自适应巡航控制模型,并离散化,
26、
27、b1,c=[0 0 1/tτ]t,d1,c=[0 1 0]t,
28、式中,x1是车辆自适应巡航系统状态向量,表示自适应巡航跟车过程中自车与传感器探测到的前车之间的实际车间距与期望车间距之差,单位为m,表示自适应巡航跟车过程中自车与前方目标车辆之间的车速差,单位为m/s,aego表示车辆实际纵向加速度,单位为m/s2,a1,c、b1,c和d1,c为车辆自适应巡航系统系数矩阵,u1为车辆自适应巡航系统输入向量,u1=[ades],ades表示期望减速度,单位为m/s2,w1为车辆自适应巡航系统干扰输入向量,w1=[alead],trel表示车头时距,单位为s,tτ为延迟常数;
29、以ts为样本对车辆自适应巡航控制模型进行离散化处理,得到车辆自适应巡航离散增量模型:
30、δx1,k+1=a1δx1,k+b1δu1,k+d1δw1,k,
31、式中,
32、
33、s1.2、利用模型预测控制算法计算最优纵向加减速度:
34、首先,基于自适应巡航跟车需求设计车辆自适应巡航系统控制输出z1,k+1,
35、z1,k+1=c1δx1,k+1+z1,k,
36、式中,
37、其次,根据车辆自适应巡航系统控制输出z1,k+1设计车辆自适应巡航系统代价函数j1,
38、
39、式中,
40、
41、
42、i1=[1],
43、接着,将车辆自适应巡航系统代价函数j1改写为:
44、
45、式中,λ1=δu1,k,最小化车辆自适应巡航系统代价函数j1等价于以下公式:
46、
47、对该式求极值,得到:
48、
49、因此得到λ1表达式:
50、
51、进一步地,对代价函数j1求二阶导数:
52、
53、由此得到车辆自适应巡航系统最优解以及最优纵向加减速度
54、
55、
56、当车辆处于斯塔克伯格博弈均衡控制模式,系统决策模块包括以下内容:
57、s2.1、建立协调自适应巡航与车身稳定性的斯塔克伯格博弈均衡控制模型,并离散化,
58、首先,建立车辆车身稳定性控制模型,
59、
60、
61、
62、式中,x2是车辆车身稳定性控制系统状态向量,ψ表示车辆横摆角,单位为deg,a2,c和b2,c为车辆车身稳定性控制系统系数矩阵,u2为车辆车身稳定性控制系统输入向量,u2=[fxfl fxfr fxrl fxrr]t,fxfl、fxfr、fxrl、fxrr分别表示左前轮、右前轮、左后轮、右后轮的纵向轮胎力,单位为n,δf表示车辆前轮转角,单位为deg,m表示整车质量,单位为kg,vx表示车辆纵向车速,单位为m/s,ms表示簧载质量,单位为kg,h表示质心到侧倾中心的高度,单位为m,lf和lr分别表示车辆质心到前、后轴的距离,单位为m,tw表示车辆轮距,单位为m,iz表示整车横摆惯量,单位为kgm2,bs表示悬架侧倾阻尼系数,单位为kn/rad,ks表示悬架侧倾刚度,单位为nm/rad,ixz表示车辆横摆-侧倾惯量积,单位为kgm2,ix表示车辆侧倾转动惯量,单位为kgm2,r表示侧倾中心到地面的距离,单位为m,mu表示非簧载质量,单位为kg,hu表示非簧载质量质心高度,单位为m,ku表示非簧载质量侧倾刚度,单位为nm/rad,
63、
64、
65、
66、
67、
68、
69、
70、
71、其次,结合车辆车身稳定性控制模型与车辆自适应巡航控制模型得到协调自适应巡航与车身稳定性的斯塔克伯格博弈均衡控制模型:
72、
73、dc=[0 0 0 0 0 0 1 0]t
74、式中,x是协调自适应巡航与车身稳定性的斯塔克伯格博弈均衡控制系统状态向量,和dc为协调自适应巡航与车身稳定性的斯塔克伯格博弈均衡控制系统系数矩阵,w为协调自适应巡航与车身稳定性的斯塔克伯格博弈均衡控制系统干扰输入向量,w=w1;
75、然后,以ts为样本对协调自适应巡航与车身稳定性的斯塔克伯格博弈均衡控制模型进行离散化处理,得到协调自适应巡航与车身稳定性的斯塔克伯格博弈均衡离散增量模型:
76、
77、式中,
78、
79、s2.2、利用模型预测控制算法计算自适应巡航控制与车身稳定性控制之间的斯塔克伯格博弈均衡,包括以下内容:
80、首先,基于自适应巡航控制需求与车身稳定性控制需求设计车辆自适应巡航系统控制输出和车辆车身稳定性控制系统控制输出数学表达式如下:
81、
82、式中,
83、基于车辆自适应巡航系统控制输出与车辆车身稳定性控制系统控制输出定义各自的代价函数,
84、
85、
86、式中,
87、
88、
89、
90、
91、
92、
93、
94、接着,将车辆自适应巡航系统代价函数改写为:
95、
96、式中,最小化车辆自适应巡航系统代价函数等价于以下公式:
97、
98、对该式求极值,得到:
99、
100、因此得到表达式:
101、
102、进一步地,对代价函数j1求二阶导数:
103、
104、由此得到车辆自适应巡航系统最优解
105、
106、同理,对车辆车身稳定性控制系统的代价函数改写:
107、
108、式中,最小化车辆车身稳定性控制系统的代价函数等价于以下公式:
109、
110、对该式求极值,得到:
111、
112、因此,得到表达式:
113、
114、进一步地,对代价函数j2求二阶导数:
115、
116、由此得到车辆车身稳定性控制系统最优解
117、
118、代入车辆自适应巡航系统最优解
119、
120、将车辆车身稳定性控制系统最优解代入车辆自适应巡航系统最优解最终得到协调自适应巡航与车身稳定性的斯塔克伯格博弈均衡解和车辆车身稳定性控制系统单步最优解与车辆自适应巡航系统单步最优解的关系可用如下公式表示:
121、
122、式中,与f1*分别表示车辆车身稳定性控制系统与车辆自适应巡航系统的映射规则。
123、当车辆处于车身稳定性控制模式,系统决策模块包括以下内容:
124、s3.1、以ts为样本离散化车辆车身稳定性控制模型,得到车辆车身稳定性控制离散增量模型:
125、δx2,k+1=a2δx2,k+b2δu2,k,
126、式中,
127、
128、s3.2、利用模型预测控制算法计算最优纵向轮胎力:
129、首先,基于车身稳定性控制需求设计车辆车身稳定性控制系统控制输出z2,k+1,
130、z2,k+1=c2δx2,k+1+z2,k,
131、式中,
132、其次,根据车辆车身稳定性控制系统控制输出z2,k+1设计车辆车身稳定性控制系统代价函数j2,
133、
134、式中,
135、
136、i2=[1],
137、接着,将车辆车身稳定性控制系统代价函数j2改写为:
138、
139、式中,λ2=δu2,k,
140、最小化车辆车身稳定性控制系统代价函数j2等价于以下公式:
141、
142、对该式求极值,得到:
143、
144、因此得到λ2表达式:
145、
146、进一步地,对代价函数j2求二阶导数:
147、
148、由此得到车辆车身稳定性控制系统最优解以及最优轮胎纵向力
149、
150、所述执行模块包括以下内容:
151、基于系统决策模块计算出的期望纵向轮胎力与期望纵向加速度计算每个车轮最终的期望纵向力其中,
152、
153、式中,分别表示最终作用在左前轮、右前轮、左后轮、右后轮上的最终期望纵向力。
154、与现有技术相比,本发明的有益效果为:
155、1.本发明设计的斯塔克伯格博弈均衡控制系统可以协调自适应巡航系统与车身稳定性控制系统的决策,减轻自适应巡航系统与车身稳定性系统同时工作时由于控制任务不同导致的决策冲突。
156、2.本发明设计的斯塔克伯格博弈均衡控制系统利用行车场景信息与自车状态信息判断车辆的控制模式,保证了车辆在不同状态与行车场景下均能高效的完成控制任务,提升了系统的工作范围。
157、3.本发明综合考虑了行车场景信息与自车状态信息,有助于提高车辆在不同行车工况下行驶的安全性。
- 还没有人留言评论。精彩留言会获得点赞!