一种混合动力消防车的行驶控制方法及装置、行驶工况预测模型的训练方法与流程
本发明涉及混合动力消防车,尤其涉及一种混合动力消防车的行驶控制方法及装置、行驶工况预测模型的训练方法。
背景技术:
1、消防工作需要面对各种各样的消防场景,以隧道救援为例,当隧道中出现火情时,由于隧道中氧气相对较少,在隧道中消防车不适合使用燃油来提供动力,且产生的尾气也会加重污染空气和遮挡视线,因此,对于隧道救援,越来越多的消防工作中使用重型混合动力消防车来携带(大量)救援物资,在隧道中只使用电池。但是,电池的能量有限,如何规划好行驶过程中的油气使用以避免未到达隧道就消耗电池的电能显得非常重要。
技术实现思路
1、本发明所要解决的技术问题在于,提供一种混合动力消防车的行驶控制方法及装置、行驶工况预测模型的训练方法,能够提前预估工况,从而提前调整混合动力消防车的车速,减少因突然变速而导致的能量浪费,实现节省能源,同时尽可能的保留电能在隧道环境中使用,满足隧道救援需求。
2、为了解决上述技术问题,本发明第一方面公开了一种混合动力消防车的行驶控制方法,所述方法基于行驶工况预测模型;所述行驶工况预测模型的输入为所述混合动力消防车在目标工况时段之前的m个工况时段对应的行驶工况特征参数及奖励值,其输出为所述混合动力消防车在所述目标工况时段对应的预测行驶工况类型;
3、所述方法包括:
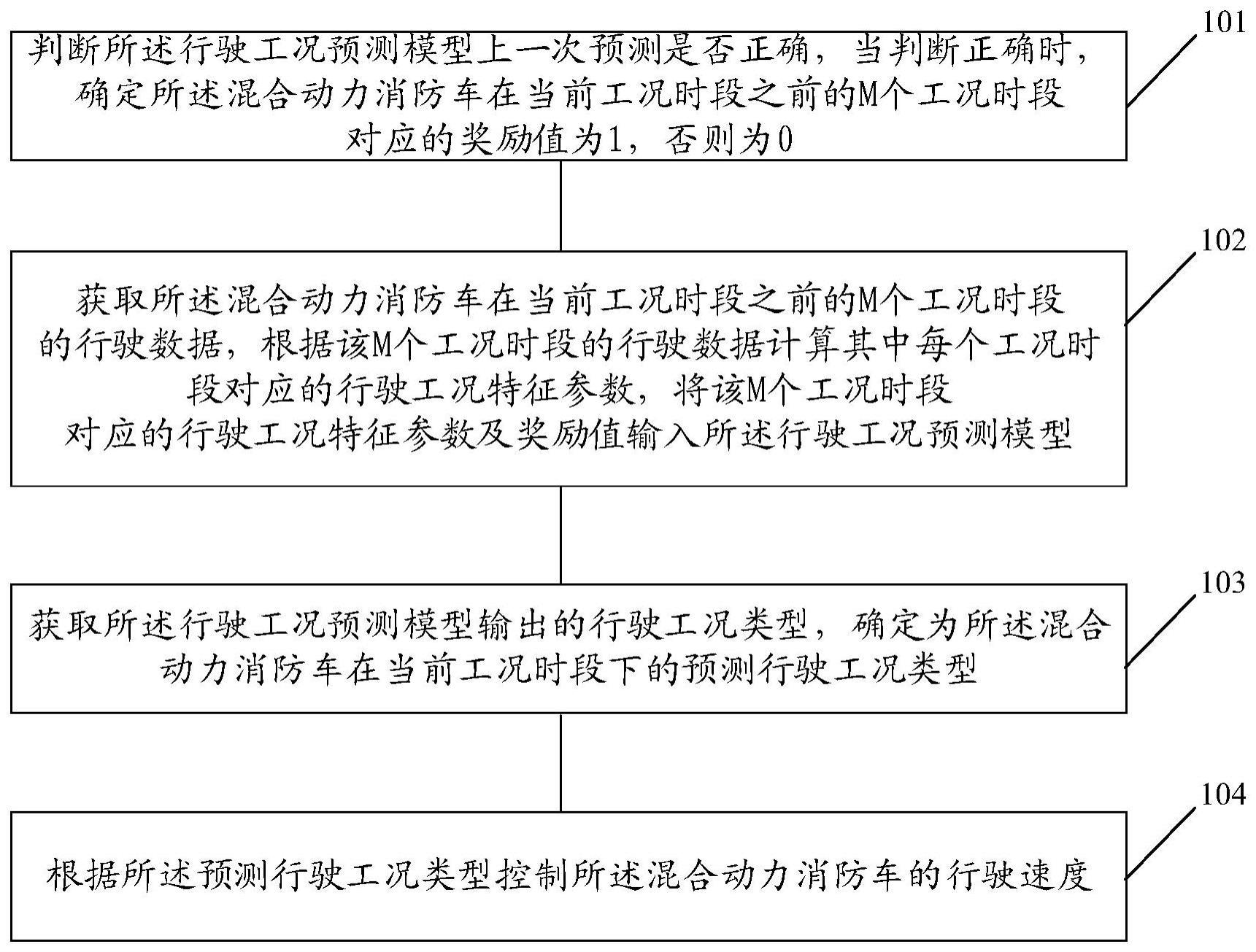
4、判断所述行驶工况预测模型上一次预测是否正确,当判断正确时,确定所述混合动力消防车在当前工况时段之前的m个工况时段对应的奖励值为1,否则为0;
5、获取所述混合动力消防车在当前工况时段之前的m个工况时段的行驶数据,根据该m个工况时段的行驶数据计算其中每个工况时段对应的行驶工况特征参数,将该m个工况时段对应的行驶工况特征参数及奖励值输入所述行驶工况预测模型;
6、获取所述行驶工况预测模型输出的行驶工况类型,确定为所述混合动力消防车在当前工况时段下的预测行驶工况类型;
7、根据所述预测行驶工况类型控制所述混合动力消防车的行驶速度。
8、作为一种可选的实施方式,在本发明第一方面中,所述根据所述预测行驶工况类型控制所述混合动力消防车的行驶速度,包括:
9、当所述预测行驶工况类型为车速小于当前车速的工况类型时,随时间逐步减小所述混合动力消防车的车速,以使车速平稳达到该预测行驶工况类型对应的车速;
10、当所述预测行驶工况类型为车速小于当前车速的工况类型时,随时间逐步增加所述混合动力消防车的车速,以使车速平稳达到该预测行驶工况类型对应的车速。
11、作为又一种可选的实施方式,在本发明第一方面中,所述行驶工况预测模型包括预先训练过的神经网络模型;
12、所述神经网络模型的输入层有m+1个输入节点,每个输入节点的取值依次为所述混合动力消防车在目标工况时段之前的m个工况时段对应的行驶工况特征参数及奖励值;
13、所述神经网络模型的输出层有k个输出节点,每个输出节点与一个工况聚类类型一一对应,且每个输出节点的取值为所述神经网络模型预测所述混合动力消防车在所述目标工况时段下的行驶工况类型属于该输出节点对应工况聚类类型的概率。
14、作为又一种可选的实施方式,在本发明第一方面中,当所述行驶工况预测模型在上一次预测正确时,确定所述混合动力消防车在目标工况时段之前的m个工况时段对应的奖励值为1,否则为0。
15、作为又一种可选的实施方式,在本发明第一方面中,所述行驶工况预测模型还包括确定模块;所述确定模块用于获取所述神经网络模型的所有输出节点的取值并确定所述混合动力消防车在所述目标工况时段对应的预测行驶工况类型为取值最大的输出节点对应的工况聚类类型。
16、本发明第二方面公开了一种混合动力消防车的行驶工况预测模型的训练方法,所述方法用于训练如本发明第一方面所述的神经网络模型;所述方法包括:
17、获取预采集的混合动力消防车的历史工况时段的行驶数据,将所述历史工况时段的行驶数据划分为n个训练工况时段的行驶数据,且每个训练工况时段的时长为预设时段长度;
18、对每个所述训练工况时段的行驶数据计算出对应的行驶工况特征参数,将每个所述训练工况时段的行驶工况特征参数输入预先确定的k均值聚类模型,并获取所述k均值聚类模型输出的该训练工况时段对应的行驶工况类型;其中,所述训练工况时段的行驶工况特征参数包括该训练工况时段的行驶数据对应的工况时段下所述混合动力消防车的平均速度、停车比例、匀速比例、减速比例和最大速度;
19、在n个训练工况时段中n1个连续的训练工况时段为目标训练工况时段,从每个所述目标训练工况时段开始的m个连续的训练工况时段的行驶工况特征参数以及该m个训练工况时段的下一训练工况时段对应的行驶工况类型为该目标训练工况时段对应的样本数据,得到n1个样本数据,根据该n1个样本数据训练所述神经网络模型;所述m和所述n1均小于n;
20、判断是否满足训练结束的条件;
21、当判断出满足时,结束对所述神经网络模型的训练,并将当前的神经网络模型确定为预先训练过的神经网络模型。
22、作为一种可选的实施方式,在本发明第二方面中,所述根据该n1个样本数据训练所述神经网络模型,包括:
23、对于第一个所述目标训练工况时段,将该目标训练工况时段对应的样本数据开始的m个连续的训练工况时段的行驶工况特征参数及初始奖励值作为所述神经网络模型的输入,并判断所述神经网络模型的输出节点中的最大取值对应的行驶工况类型与该m个训练工况时段的下一训练工况时段对应的行驶工况类型是否一致,当判断为一致时,确定第二个所述目标训练工况时段对应的奖励值为1,否则为0;
24、对于除第一个所述目标训练工况时段之外的每个目标训练工况时段,将该目标训练工况时段对应的样本数据开始的m个连续的训练工况时段的行驶工况特征参数及对应的奖励值作为所述神经网络模型的输入,并判断所述神经网络模型的输出节点中的最大取值对应的行驶工况类型与该m个训练工况时段的下一训练工况时段对应的行驶工况类型是否一致,当判断为一致时,确定下一训练工况时段对应的奖励值为1,否则为0。
25、作为又一种可选的实施方式,在本发明第二方面中,所述k均值聚类模型通过如下的方法预先确定:
26、获取所述混合动力消防车在多种行驶工况类型下的标准工况时段数据,计算每个所述标准工况时段数据对应的行驶工况特征参数;其中,每个所述标准工况时段数据的行驶工况特征参数包括该标准工况时段数据对应的工况时段下所述混合动力消防车的平均速度、停车比例、匀速比例、减速比例和最大速度;
27、对k均值聚类模型的聚类中心的数量预先取多个值,得到多个待确定k均值聚类模型;
28、将每个所述标准工况时段数据的行驶工况特征参数输入每个所述待确定k均值聚类模型,并获取该待确定k均值聚类模型输出的聚类方案;所述待确定k均值聚类模型的聚类方案为该待确定k均值聚类模型将输入的多种行驶工况类型下的标准工况时段数据聚类得到的多组标准工况时段数据,其中,每组标准工况时段数据归为一个工况聚类类型,且该工况聚类类型的数量等于该待确定k均值聚类模型的聚类中心的数量;
29、计算每个所述聚类方案的轮廓系数,选择最大轮廓系数对应的待确定k均值聚类模型为预先确定的k均值聚类模型;所述神经网络模型的输出节点的数量k等于该预先确定的k均值聚类模型对应的工况聚类类型的数量。
30、本发明第三方面公开了一种混合动力消防车的行驶控制装置,包括:
31、存储有可执行程序代码的存储器;
32、与所述存储器耦合的处理器;
33、所述处理器调用所述存储器中存储的所述可执行程序代码,执行本发明第一方面公开的一种混合动力消防车的行驶控制方法中的步骤。
34、本发明第三方面公开了一种计算机存储介质,所述计算机存储介质存储有计算机指令,所述计算机指令被调用时,用于执行本发明第一方面公开的一种混合动力消防车的行驶控制方法中的步骤。
35、与现有技术相比,本发明实施例具有以下有益效果:
36、相比于现有技术,本发明实施例提出一种行驶工况预测模型,用于根据历史工况时段的特征参数及奖励值输出对于历史工况时段之后的工况类型的预测,基于该模型的预测功能由于提前预估了工况可提前调整混合动力消防车的车速,因此能够减少因突然变速而导致的能量浪费,进而实现节省能源,同时尽可能的保留电能在隧道环境中使用,满足隧道救援需求。
- 还没有人留言评论。精彩留言会获得点赞!