一种车辆控制方法、装置、计算机设备及存储介质与流程
本公开涉及车辆,具体而言,涉及一种车辆控制方法、装置、计算机设备及存储介质。
背景技术:
1、随着人工智能技术的快速发展,具有自动驾驶功能的智能汽车逐渐走进了人们的日常生活。在自动驾驶功能中,车辆可以根据实时行驶参数自动控制执行车辆执行加速、减速等指令,而目前的自动驾驶功能在部分场景下的可用性有待提高,因此如何提升车辆的自动驾驶体验成为了该领域内亟待解决的问题。
技术实现思路
1、本公开实施例至少提供一种车辆控制方法、装置、计算机设备及存储介质。
2、第一方面,本公开实施例提供了一种车辆控制方法,包括:
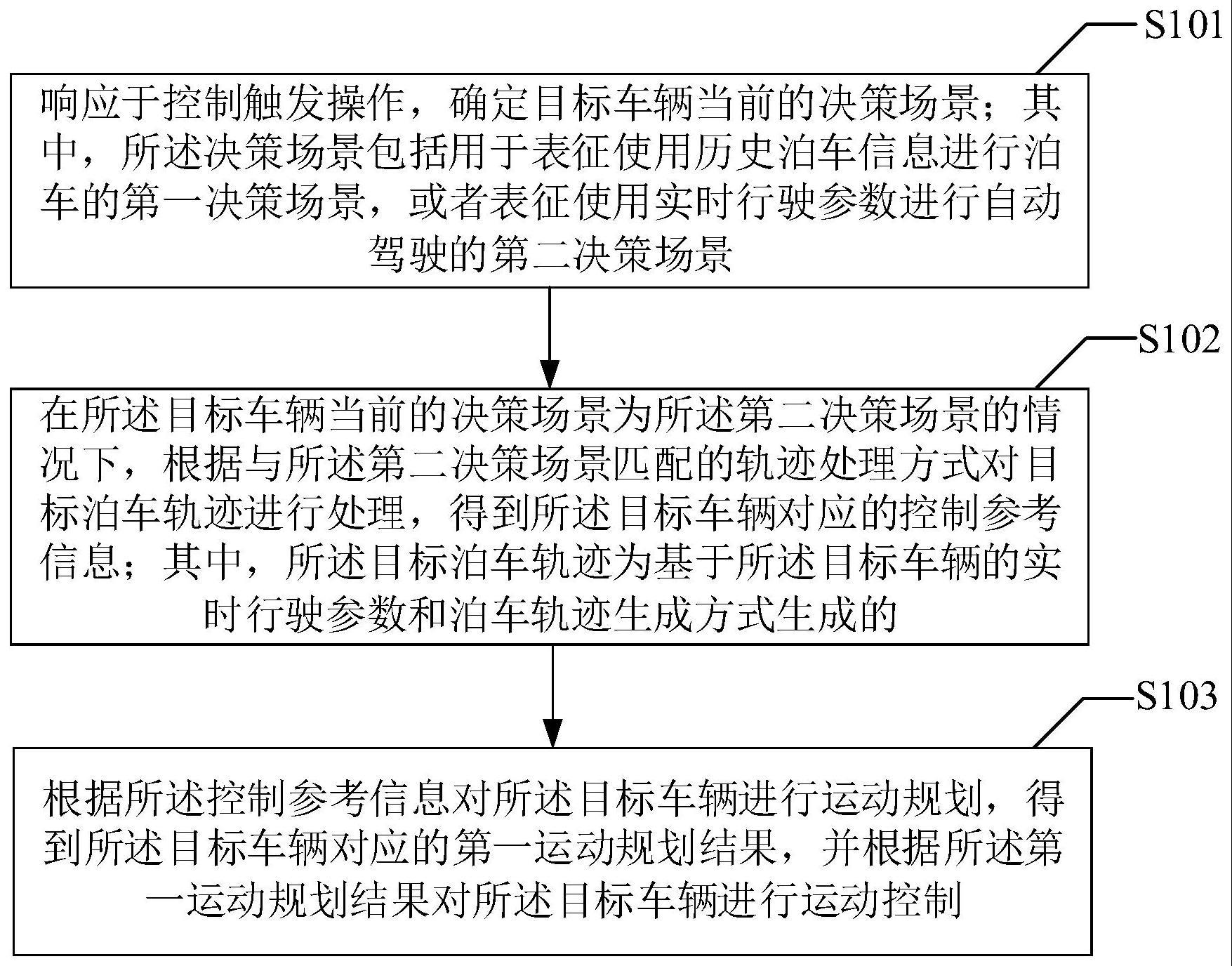
3、响应于控制触发操作,确定目标车辆当前的决策场景;其中,所述决策场景包括用于表征使用历史泊车信息进行泊车的第一决策场景,或者表征使用实时行驶参数进行自动驾驶的第二决策场景;
4、在所述目标车辆当前的决策场景为所述第二决策场景的情况下,根据与所述第二决策场景匹配的轨迹处理方式对目标泊车轨迹进行处理,得到所述目标车辆对应的控制参考信息;其中,所述目标泊车轨迹为基于所述目标车辆的实时行驶参数和泊车轨迹生成方式生成的;
5、根据所述控制参考信息对所述目标车辆进行运动规划,得到所述目标车辆对应的第一运动规划结果,并根据所述第一运动规划结果对所述目标车辆进行运动控制。
6、一种可能的实施方式中,所述根据与所述第二决策场景匹配的轨迹处理方式对目标泊车轨迹进行处理,得到所述目标车辆对应的控制参考信息,包括:
7、对所述目标泊车轨迹进行转换处理,得到初始参考线信息;
8、根据与所述第二决策场景匹配的轨迹处理方式对所述初始参考线信息进行调整处理,生成所述目标车辆对应的控制参考信息。
9、一种可能的实施方式中,所述根据与所述第二决策场景匹配的轨迹处理方式对所述初始参考线信息进行调整处理,生成所述目标车辆对应的控制参考信息,包括:
10、对初始参考线信息中包含的参考轨迹进行分段处理,得到多段参考轨迹;
11、对各段参考轨迹中所包含的轨迹点进行轨迹点处理,得到处理后的各段参考轨迹;
12、确定各段参考轨迹分别对应的参考轨迹边界,并将处理后的各段参考轨迹及分别对应的参考轨迹边界,作为所述目标车辆对应的控制参考信息。
13、一种可能的实施方式中,所述对初始参考线信息中包含的参考轨迹进行分段处理,得到多段参考轨迹,包括:
14、根据参考轨迹中各轨迹点分别对应的速度信息,确定各轨迹分别对应的行驶档位;
15、根据各轨迹点分别对应的行驶档位,对初始参考线信息中包含的参考轨迹进行分段处理,得到多段参考轨迹;其中,同一段参考轨迹中的各轨迹点对应的行驶档位相同。
16、一种可能的实施方式中,所述对各段参考轨迹中所包含的轨迹点进行轨迹点处理,得到处理后的各段参考轨迹,包括:
17、针对任一段参考轨迹,根据该段参考轨迹中所包含的各相邻轨迹点之间的距离对轨迹点进行筛选处理,得到筛选处理后的轨迹点;
18、对所述筛选处理后的轨迹点进行重采样处理,得到重采样处理后的轨迹点;
19、对所述重采样处理后的轨迹点进行平滑滤波处理,得到平滑滤波处理后的轨迹点,各段参考轨迹中平滑滤波处理后的轨迹点构成处理后的各段参考轨迹。
20、一种可能的实施方式中,所述控制参考信息包括速度控制参考信息和轨迹点控制参考信息;
21、所述根据所述控制参考信息对所述目标车辆进行运动规划,得到所述目标车辆对应的第一运动规划结果,包括:
22、根据速度控制参考信息对所述目标车辆进行速度规划,得到所述目标车辆对应的速度规划结果;
23、以及,根据轨迹点控制参考信息对所述目标车辆进行轨迹规划,得到所述目标车辆对应的轨迹规划结果,所述速度规划结果和所述轨迹规划结果构成所述目标车辆对应的第一运动规划结果。
24、一种可能的实施方式中,所述方法还包括:
25、在所述目标车辆当前的决策场景为所述第一决策场景的情况下,获取所述目标车辆对应的历史泊车信息;
26、基于所述历史泊车信息对所述目标车辆进行运动规划,得到所述目标车辆对应的第二运动规划结果;
27、根据所述第二运动规划结果对所述目标车辆进行运动控制。
28、一种可能的实施方式中,响应于控制触发操作,确定所述目标车辆当前的决策场景,包括:
29、响应于针对决策场景的选择操作,展示多种决策场景选项;所述多种决策场景选项包括对应所述第一决策场景的第一决策场景选项,和对应所述第二决策场景的第二决策场景选项;所述第二决策场景选项包括实时泊车场景和/或实时行车场景;
30、响应于针对所述多种决策场景选项中任一决策场景选项的触发操作,确定所述目标车辆当前的决策场景。
31、第二方面,本公开实施例还提供一种车辆控制装置,包括:
32、确定模块,用于响应于控制触发操作,确定目标车辆当前的决策场景;其中,所述决策场景包括用于表征使用历史泊车信息进行泊车的第一决策场景,或者表征使用实时行驶参数进行自动驾驶的第二决策场景;
33、处理模块,用于在所述目标车辆当前的决策场景为所述第二决策场景的情况下,根据与所述第二决策场景匹配的轨迹处理方式对目标泊车轨迹进行处理,得到所述目标车辆对应的控制参考信息;其中,所述目标泊车轨迹为基于所述目标车辆的实时行驶参数和泊车轨迹生成方式生成的;
34、控制模块,用于根据所述控制参考信息对所述目标车辆进行运动规划,得到所述目标车辆对应的第一运动规划结果,并根据所述第一运动规划结果对所述目标车辆进行运动控制。
35、一种可能的实施方式中,所述处理模块,在根据与所述第二决策场景匹配的轨迹处理方式对目标泊车轨迹进行处理,得到所述目标车辆对应的控制参考信息时,用于:
36、对所述目标泊车轨迹进行转换处理,得到初始参考线信息;
37、根据与所述第二决策场景匹配的轨迹处理方式对所述初始参考线信息进行调整处理,生成所述目标车辆对应的控制参考信息。
38、一种可能的实施方式中,所述处理模块,在根据与所述第二决策场景匹配的轨迹处理方式对所述初始参考线信息进行调整处理,生成所述目标车辆对应的控制参考信息时,用于:
39、对初始参考线信息中包含的参考轨迹进行分段处理,得到多段参考轨迹;
40、对各段参考轨迹中所包含的轨迹点进行轨迹点处理,得到处理后的各段参考轨迹;
41、确定各段参考轨迹分别对应的参考轨迹边界,并将处理后的各段参考轨迹及分别对应的参考轨迹边界,作为所述目标车辆对应的控制参考信息。
42、一种可能的实施方式中,所述处理模块,在对初始参考线信息中包含的参考轨迹进行分段处理,得到多段参考轨迹时,用于:
43、根据参考轨迹中各轨迹点分别对应的速度信息,确定各轨迹分别对应的行驶档位;
44、根据各轨迹点分别对应的行驶档位,对初始参考线信息中包含的参考轨迹进行分段处理,得到多段参考轨迹;其中,同一段参考轨迹中的各轨迹点对应的行驶档位相同。
45、一种可能的实施方式中,所述处理模块,在对各段参考轨迹中所包含的轨迹点进行轨迹点处理,得到处理后的各段参考轨迹时,用于:
46、针对任一段参考轨迹,根据该段参考轨迹中所包含的各相邻轨迹点之间的距离对轨迹点进行筛选处理,得到筛选处理后的轨迹点;
47、对所述筛选处理后的轨迹点进行重采样处理,得到重采样处理后的轨迹点;
48、对所述重采样处理后的轨迹点进行平滑滤波处理,得到平滑滤波处理后的轨迹点,各段参考轨迹中平滑滤波处理后的轨迹点构成处理后的各段参考轨迹。
49、一种可能的实施方式中,所述控制参考信息包括速度控制参考信息和轨迹点控制参考信息;
50、所述控制模块,在根据所述控制参考信息对所述目标车辆进行运动规划,得到所述目标车辆对应的第一运动规划结果时,用于:
51、根据速度控制参考信息对所述目标车辆进行速度规划,得到所述目标车辆对应的速度规划结果;
52、以及,根据轨迹点控制参考信息对所述目标车辆进行轨迹规划,得到所述目标车辆对应的轨迹规划结果,所述速度规划结果和所述轨迹规划结果构成所述目标车辆对应的第一运动规划结果。
53、一种可能的实施方式中,所述控制模块还用于:
54、在所述目标车辆当前的决策场景为所述第一决策场景的情况下,获取所述目标车辆对应的历史泊车信息;
55、基于所述历史泊车信息对所述目标车辆进行运动规划,得到所述目标车辆对应的第二运动规划结果;
56、根据所述第二运动规划结果对所述目标车辆进行运动控制。
57、一种可能的实施方式中,所述确定模块,在响应于控制触发操作,确定所述目标车辆当前的决策场景时,用于:
58、响应于针对决策场景的选择操作,展示多种决策场景选项;所述多种决策场景选项包括对应所述第一决策场景的第一决策场景选项,和对应所述第二决策场景的第二决策场景选项;所述第二决策场景选项包括实时泊车场景和/或实时行车场景;
59、响应于针对所述多种决策场景选项中任一决策场景选项的触发操作,确定所述目标车辆当前的决策场景。
60、第三方面,本公开实施例还提供一种计算机设备,包括:处理器、存储器和总线,所述存储器存储有所述处理器可执行的机器可读指令,当计算机设备运行时,所述处理器与所述存储器之间通过总线通信,所述机器可读指令被所述处理器执行时执行上述第一方面,或第一方面中任一种可能的实施方式中的步骤。
61、第四方面,本公开实施例还提供一种计算机可读存储介质,该计算机可读存储介质上存储有计算机程序,该计算机程序被处理器运行时执行上述第一方面,或第一方面中任一种可能的实施方式中的步骤。
62、本公开实施例提供的车辆控制方法、装置、计算机设备及存储介质,通过控制触发操作确定所述目标车辆当前的决策场景,并在决策场景为使用实时行驶参数进行自动驾驶的第二决策场景的情况下,根据与所述第二决策场景匹配的轨迹处理方式,对根据目标车辆的实时行驶参数和泊车轨迹生成方式生成的目标泊车轨迹进行处理,得到用于控制目标车辆进行自动驾驶的控制参考信息,从而可以根据所述控制参考信息对所述目标车辆进行运动规划,得到所述目标车辆对应的第一运动规划结果,并根据所述第一运动规划结果对所述目标车辆进行运动控制。这样,通过根据目标车辆当前的决策场景匹配的轨迹处理方式对目标车辆进行运动规划和运动控制,从而使得目标车辆可以在多种决策场景下进行自动驾驶;另一方面,在进行轨迹处理时,可以以实时行驶参数和泊车轨迹生成方式生成的目标泊车轨迹为基础进行处理,相较于不同场景使用不同的轨迹生成方式生成轨迹,使用泊车轨迹作为处理前的初始参考线信息,可以实现对泊车轨迹生成方式的复用,简化自动驾驶过程中的处理逻辑,提高运动规划结果的规划效率和车辆控制效率。
63、为使本公开的上述目的、特征和优点能更明显易懂,下文特举较佳实施例,并配合所附附图,作详细说明如下。
- 还没有人留言评论。精彩留言会获得点赞!