一种自适应巡航车速调节方法、系统及计算机设备与流程
本发明涉及车辆驾驶控制领域,特别涉及一种自适应巡航车速调节方法、系统及计算机设备。
背景技术:
1、随着汽车产业的快速发展,智能驾驶逐渐走入了大众的视野,自适应巡航功能作为智能驾驶最重要的功能之一,理所当然的成为了当今智能驾驶车辆的必备功能,也是消费者和驾驶员的必要需求。
2、通常情况下,自适应巡航功能在车辆行驶中包含着两种模式,第一种是普通巡航模式,自适应巡航功能开启时,在没有前车的情况下,车辆会保持驾驶员设定的巡航速度行驶,第二种是前车跟随模式,自适应巡航功能开启时,在有前车的情况下,车辆会跟随前车行驶。
3、但是,现有的自适应巡航的运行逻辑无论在行驶状态还是静停状态都保持不变,以相同的策略模式应对静停状态时,当前车的行驶状态或位置状态发生变化,例如前车进行变道或转弯,那么车辆就会立即进行加速或减速,导致驾驶员的恐慌,也容易影响后车导致追尾等事故的发生,又或者此时驾驶员主动进行巡航速度的调节或误触巡航调节按键,车辆也会出现突然加速猛冲的情况,导致驾驶体验差、车辆速度顿挫、车辆起停不平滑的问题。
技术实现思路
1、基于此,本发明的目的是提供一种自适应巡航车速调节方法、系统及计算机设备,通过分别设定车辆在跟随制动和主动制动两种情况下的静停策略,并根据前车的行驶状态对驾驶员的巡航加速指令和巡航减速指令进行相应的车速调节对策反应,避免了因共用一套自适应巡航行驶逻辑造成的起停不平滑、车辆猛冲顿挫的问题,极大地提高了驾驶员的驾驶体验。
2、根据本发明提出的自适应巡航车速调节方法,通过自适应巡航系统实现,所述自适应巡航系统包括检测模块、输入模块、控制模块和执行模块,所述控制模块分别与所述输入模块、所述检测模块和所述执行模块电连接,所述输入模块与所述执行模块电连接,所述方法包括以下步骤:
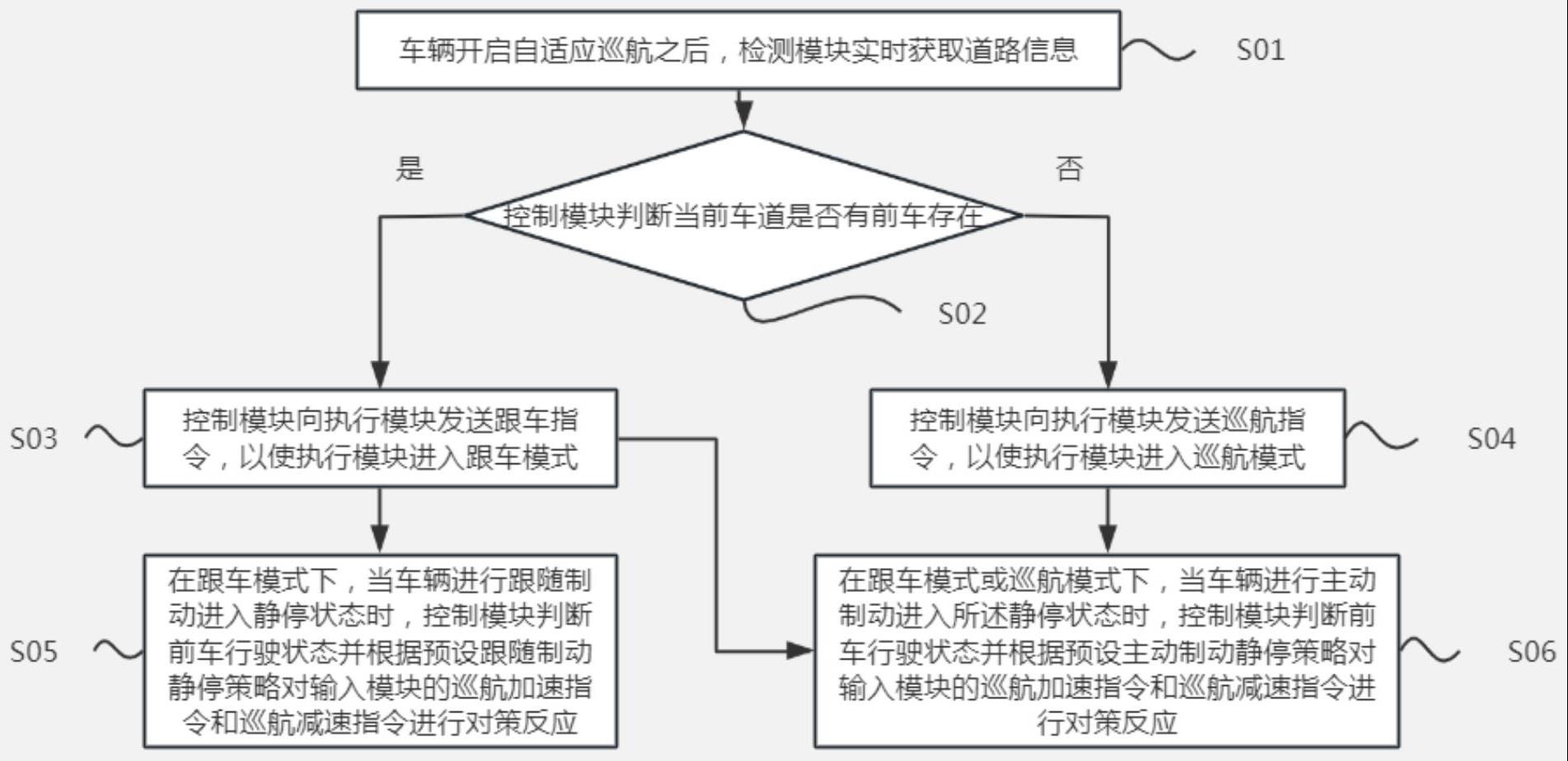
3、车辆开启自适应巡航之后,所述检测模块实时获取道路信息;
4、所述控制模块根据所述道路信息判断当前车道是否有前车存在,若判定当前车道有前车存在,则所述控制模块向所述执行模块发送跟车指令,以使所述执行模块进入跟车模式,若判定当前车道无前车存在,则所述控制模块向所述执行模块发送巡航指令,以使所述执行模块进入巡航模式;
5、在所述跟车模式下,当所述车辆进行跟随制动进入静停状态时,所述控制模块判断前车行驶状态并根据预设跟随制动静停策略对所述输入模块的巡航加速指令和巡航减速指令进行对策反应;
6、在所述跟车模式或所述巡航模式下,当所述车辆进行主动制动进入所述静停状态时,所述控制模块判断所述前车行驶状态并根据预设主动制动静停策略对所述输入模块的所述巡航加速指令和所述巡航减速指令进行对策反应。
7、综上,根据上述自适应巡航车速调节方法、系统及计算机设备,通过分别设定车辆在跟随制动和主动制动两种情况下的静停策略,并根据前车的行驶状态对驾驶员的巡航加速指令和巡航减速指令进行相应的车速调节对策反应,避免了因共用一套自适应巡航行驶逻辑造成的起停不平滑、车辆猛冲顿挫的问题,极大地提高了驾驶员的驾驶体验。具体为,车辆开启自适应巡航之后,所述检测模块实时获取道路信息,所述控制模块根据所述道路信息判断当前车道是否有前车存在,若判定当前车道有前车存在,则进入跟车模式,若判定当前车道无前车存在,则进入巡航模式,在所述跟车模式下,当所述车辆进行跟随制动进入静停状态时,所述控制模块判断前车行驶状态并根据预设跟随制动静停策略对所述输入模块的巡航加速指令和巡航减速指令进行对策反应,在所述跟车模式或所述巡航模式下,当所述车辆进行主动制动进入所述静停状态时,所述控制模块判断所述前车行驶状态并根据预设主动制动静停策略对所述输入模块的所述巡航加速指令和所述巡航减速指令进行对策反应,避免了因共用一套自适应巡航行驶逻辑造成的起停不平滑、车辆猛冲顿挫的问题,极大地提高了驾驶员的驾驶体验。
8、进一步的,所述在所述跟车模式下,当所述车辆进行跟随制动进入静停状态时,所述控制模块判断前车行驶状态并根据预设跟随制动静停策略对所述输入模块的巡航加速指令和巡航减速指令进行对策反应的步骤包括:
9、在所述跟车模式下,当所述检测模块获取到前车制动信息时,所述控制模块根据所述前车制动信息向所述执行模块发送跟停指令,以使所述执行模块保持所述跟车模式并进行所述跟随制动;
10、当所述跟随制动将所述车辆制动停止时,所述检测模块获取前车信息,所述控制模块根据所述前车信息判断前车是否驶离,若判定所述前车未驶离,则所述控制模块不可执行所述输入模块发送的所述巡航加速指令和所述巡航减速指令,若判定所述前车已驶离,则所述控制模块可根据所述输入模块发送的所述巡航加速指令向所述执行模块发送起步指令,以使所述执行模块进行加速直到车速达到当前设置的巡航速度。
11、进一步的,所述在所述跟车模式或所述巡航模式下,当所述车辆进行主动制动进入所述静停状态时,所述控制模块判断所述前车行驶状态并根据预设主动制动静停策略对所述输入模块的所述巡航加速指令和所述巡航减速指令进行对策反应的步骤包括:
12、在所述跟车模式或所述巡航模式下,当所述输入模块向所述执行模块发送制动指令,以使所述执行模块切换或保持所述巡航模式并进行所述主动制动;
13、当所述主动制动将所述车辆制动停止时,所述检测模块获取所述前车信息,所述控制模块根据所述前车信息判断前车是否驶离,若判定所述前车未驶离,则所述控制模块不可执行所述输入模块发送的所述巡航加速指令和所述巡航减速指令,若判定所述前车已驶离,则所述执行模块切换为巡航模式,所述控制模块可执行所述输入模块发送的所述巡航加速指令和所述巡航减速指令。
14、所述控制模块向所述执行模块发送跟车指令,以使所述执行模块进入跟车模式的步骤包括:
15、所述检测模块获取前车车距,以使所述控制模块判断所述前车车距是否等于预设跟车距离;
16、若所述前车车距等于所述预设跟车距离,则所述检测模块获取前车车速,所述控制模块向所述执行模块发送车速调节指令,以使所述执行模块调节本车车速至所述前车车速;
17、若所述前车车距不等于所述预设跟车距离,则所述控制模块计算所述前车车距与所述预设跟车距离的距离差值,以使所述执行模块根据所述距离差值进行加速或减速直至所述前车车距与所述预设跟车距离相等,所述检测模块获取所述前车车速,所述控制模块向所述执行模块发送所述车速调节指令,以使所述执行模块调节所述本车车速至所述前车车速。
18、进一步的,所述控制模块向所述执行模块发送巡航指令,以使所述执行模块进入巡航模式的步骤包括:
19、所述控制模块向所述执行模块发送所述巡航指令,所述执行模块进入所述巡航模式并将车速调节为预设巡航速度;
20、当所述控制模块接收到所述输入模块发送的所述巡航加速指令,所述控制模块开始计时以获取所述巡航加速指令持续时间,所述控制模块判断所述巡航加速指令持续时间是否大于预设一级巡航加速时间;
21、若所述巡航加速指令持续时间大于预设一级巡航加速时间,则所述控制模块向所述执行模块发送二级巡航加速指令,以使所述执行模块将所述车速增加二级巡航速度,若所述巡航加速指令持续时间小于或等于预设一级巡航加速时间,则所述控制模块向所述执行模块发送一级巡航加速指令,以使所述执行模块将所述车速增加一级巡航速度。
22、进一步的,所述控制模块向所述执行模块发送巡航指令,以使所述执行模块进入巡航模式的步骤还包括:
23、所述控制模块向所述执行模块发送所述巡航指令,所述执行模块进入所述巡航模式并将车速调节为预设巡航速度;
24、当所述控制模块接收到所述输入模块发送的所述巡航减速指令,所述控制模块开始计时以获取所述巡航减速指令持续时间,所述控制模块判断所述巡航减速指令持续时间是否大于预设一级巡航减速时间;
25、若所述巡航减速指令持续时间大于预设一级巡航减速时间,则所述控制模块向所述执行模块发送二级巡航减速指令,以使所述执行模块将所述车速减少二级巡航速度,若所述巡航减速指令持续时间小于或等于预设一级巡航减速时间,则所述控制模块向所述执行模块发送一级巡航减速指令,以使所述执行模块将所述车速减少一级巡航速度。
26、进一步的,所述若所述巡航减速指令持续时间大于预设一级巡航减速时间,则所述控制模块向所述执行模块发送二级巡航减速指令,以使所述执行模块将所述车速减少二级巡航速度,若所述巡航减速指令持续时间小于或等于预设一级巡航减速时间,则所述控制模块向所述执行模块发送一级巡航减速指令,以使所述执行模块将所述车速减少一级巡航速度的步骤包括:
27、所述执行模块在巡航模式下可将所述车速减少至的最低值为所述预设巡航车速,若所述执行模块根据一级巡航减速指令或二级巡航减速指令进行减速将使所述车速低于预设巡航车速时,所述执行模块将所述车速保持在所述预设巡航速度。
28、根据本发明实施例的一种自适应巡航车速调节系统,通过自适应巡航系统实现,所述自适应巡航系统包括检测模块、输入模块、控制模块和执行模块,所述控制模块分别与所述输入模块、所述检测模块和所述执行模块电连接,所述输入模块与所述执行模块电连接,所述自适应巡航车速调节系统包括以下步骤:
29、检测模块,用于实时获取道路信息;
30、输入模块,用于向控制模块发送巡航加速指令和巡航减速指令;
31、控制模块,用于根据所述道路信息判断当前车道是否有前车存在,以控制所述执行模块进入跟车模式或巡航模式,判断前车行驶状态并根据预设跟随制动静停策略和预设主动制动静停策略对所述输入模块的巡航加速指令和巡航减速指令进行对策反应;
32、执行模块,用于保持车辆在跟车模式或巡航模式行驶。
33、本发明另一方面,还提供一种存储介质,包括所述存储介质存储一个或多个程序,该程序被执行时实现如上述的自适应巡航车速调节方法。
34、本发明另一方面还提供一种计算机设备,所述计算机设备包括存储器和处理器,其中:
35、所述存储器用于存放计算机程序;
36、所述处理器用于执行所述存储器上所存放的计算机程序时,实现如上述的自适应巡航车速调节方法。
- 还没有人留言评论。精彩留言会获得点赞!