一种车辆躲避后方撞击的避障方法及装置与流程
本技术涉及车辆控制,尤其是涉及一种车辆躲避后方撞击的避障方法及装置。
背景技术:
1、目前具备高安全性的汽车都有自动避让功能,该功能是指当汽车预判前方有障碍物时,如果驾驶员没有采取规避动作,系统会立即介入,执行规避动作,避免碰撞事故发生;但现实中还有一些危险的事故是目前的自动避让无法解决的,例如车辆正常行驶中,后方高速驶来车辆发生碰撞;或者在高速路上由于某种原因拥堵,车辆在停车等待或缓慢通行时,后方车辆快速驶来发生追尾,如果后方是重型车辆则会导致小型汽车被夹扁、导致司乘人员伤亡;通过上述类型的事故表明,目前的汽车自动避让功能已经无法确保司乘人员的生命安全。
技术实现思路
1、有鉴于此,本技术的目的在于提供一种车辆躲避后方撞击的避障方法及装置,可自动躲避后方车辆的撞击,更加全面的保障司乘人员的安全。
2、本技术实施例提供了一种车辆躲避后方撞击的避障方法,所述避障方法包括:
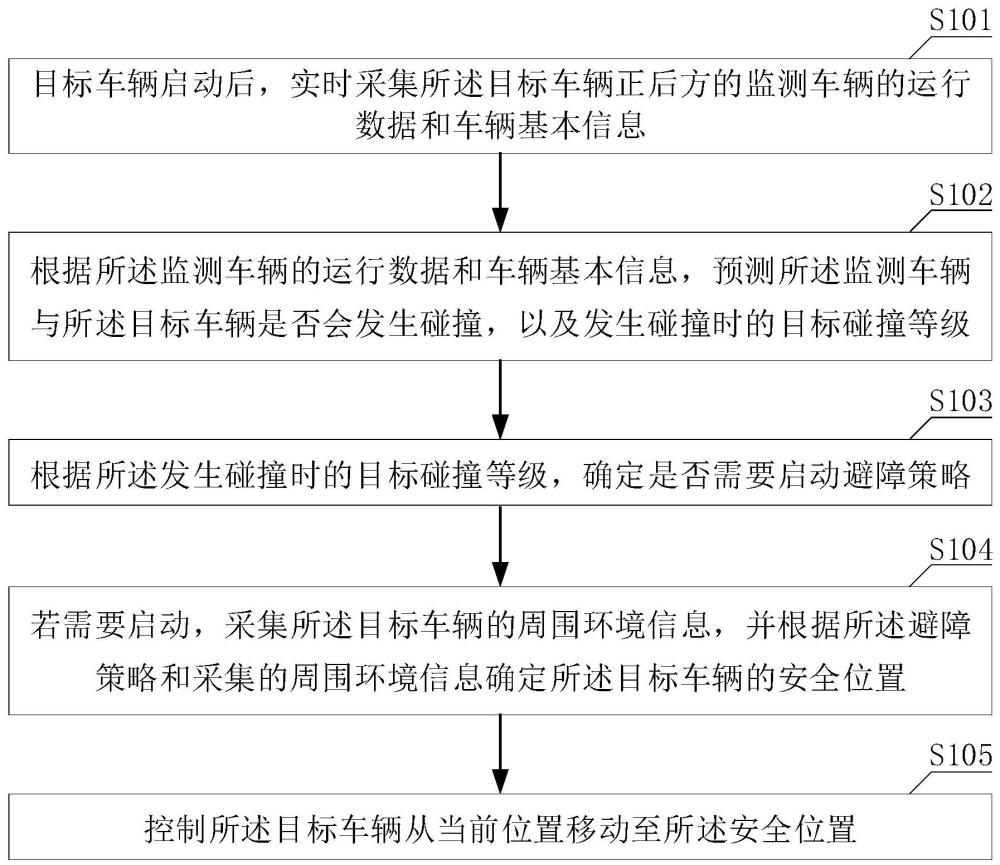
3、目标车辆启动后,实时采集所述目标车辆正后方的监测车辆的运行数据和车辆基本信息;
4、根据所述监测车辆的运行数据和车辆基本信息,预测所述监测车辆与所述目标车辆是否会发生碰撞,以及发生碰撞时的目标碰撞等级;
5、根据所述发生碰撞时的目标碰撞等级,确定是否需要启动避障策略;
6、若需要启动,采集所述目标车辆的周围环境信息,并根据所述避障策略和采集的周围环境信息确定所述目标车辆的安全位置;
7、控制所述目标车辆从当前位置移动至所述安全位置。
8、可选的,所述根据所述监测车辆的运行数据和车辆基本信息,预测所述监测车辆与所述目标车辆是否会发生碰撞,以及发生碰撞时的目标碰撞等级,包括:
9、根据所述运行数据确定所述监测车辆的行驶速度和所述监测车辆与所述目标车辆之间的车距,以及根据所述车辆基本信息确定所述监测车辆的车辆质量;
10、根据所述监测车辆的行驶速度和所述监测车辆的车辆质量,确定所述监测车辆的刹车距离;
11、当所述刹车距离小于所述监测车辆与所述目标车辆之间的车距时,确定所述监测车辆与所述目标车辆会发生碰撞;
12、当确定所述监测车辆与所述目标车辆会发生碰撞,根据所述监测车辆的行驶速度和所述监测车辆的车辆质量,确定所述监测车辆的目标动能;
13、根据所述监测车辆的目标动能和预先设定的动能-碰撞等级对应关系,确定所述监测车辆与所述目标车辆发生碰撞时的目标碰撞等级。
14、可选的,所述根据所述发生碰撞时的目标碰撞等级,确定是否需要启动避障策略,包括:
15、判断所述发生碰撞时的目标碰撞等级是否超过预设等级;
16、若超过预设等级,确定需要启动避障策略。
17、可选的,所述采集所述目标车辆的周围环境信息,并根据所述避障策略和采集的周围环境信息确定所述目标车辆的安全位置,包括:
18、根据安装在所述目标车辆上的感知装置,获取所述目标车辆的侧方环境信息;
19、根据所述目标车辆的侧方环境信息,确定出至少一个移动限制条件;
20、基于所述至少一个移动限制条件和所述避障策略,确定所述目标车辆的移动方向和移动距离;
21、根据所述目标车辆的移动方向和移动距离,确定所述目标车辆的安全位置。
22、可选的,所述实时采集所述目标车辆正后方的监测车辆的运行数据和车辆基本信息,包括:
23、通过安装于所述目标车辆后方的雷达和图像采集装置实时检测所述目标车辆正后方的监测车辆的运行数据和车辆基本信息。
24、可选的,所述根据安装在所述目标车辆上的感知装置,获取所述目标车辆的侧方环境信息,包括:
25、根据安装在所述目标车辆左侧和右侧的雷达和图像采集装置,获取所述目标车辆左侧环境信息和右侧环境信息。
26、可选的,所述根据所述车辆基本信息确定所述监测车辆的车辆质量,包括:
27、获取所述车辆基本信息中的所述监测车辆的车辆类型信息;
28、根据所述车辆类型信息,确定所述监测车辆的车辆质量。
29、本技术实施例还提供了一种车辆躲避后方撞击的避障装置,所述避障装置包括:
30、第一采集模块,用于目标车辆启动后,实时采集所述目标车辆正后方的监测车辆的运行数据和车辆基本信息;
31、预测模块,用于根据所述监测车辆的运行数据和车辆基本信息,预测所述监测车辆与所述目标车辆是否会发生碰撞,以及发生碰撞时的目标碰撞等级;
32、确定模块,用于根据所述发生碰撞时的目标碰撞等级,确定是否需要启动避障策略;
33、第二采集模块,用于若需要启动,采集所述目标车辆的周围环境信息,并根据所述避障策略和采集的周围环境信息确定所述目标车辆的安全位置;
34、控制模块,用于控制所述目标车辆从当前位置移动至所述安全位置。
35、可选的,所述预测模块在用于根据所述监测车辆的运行数据和车辆基本信息,预测所述监测车辆与所述目标车辆是否会发生碰撞,以及发生碰撞时的目标碰撞等级时,所述预测模块用于:
36、根据所述运行数据确定所述监测车辆的行驶速度和所述监测车辆与所述目标车辆之间的车距,以及根据所述车辆基本信息确定所述监测车辆的车辆质量;
37、根据所述监测车辆的行驶速度和所述监测车辆的车辆质量,确定所述监测车辆的刹车距离;
38、当所述刹车距离小于所述监测车辆与所述目标车辆之间的车距时,确定所述监测车辆与所述目标车辆会发生碰撞;
39、当确定所述监测车辆与所述目标车辆会发生碰撞,根据所述监测车辆的行驶速度和所述监测车辆的车辆质量,确定所述监测车辆的目标动能;
40、根据所述监测车辆的目标动能和预先设定的动能-碰撞等级对应关系,确定所述监测车辆与所述目标车辆发生碰撞时的目标碰撞等级。
41、可选的,所述确定模块在用于根据所述发生碰撞时的目标碰撞等级,确定是否需要启动避障策略时,所述确定模块用于:
42、判断所述发生碰撞时的目标碰撞等级是否超过预设等级;
43、若超过预设等级,确定需要启动避障策略。
44、可选的,所述第二采集模块在用于采集所述目标车辆的周围环境信息,并根据所述避障策略和采集的周围环境信息确定所述目标车辆的安全位置时,所述第二采集模块用于:
45、根据安装在所述目标车辆上的感知装置,获取所述目标车辆的侧方环境信息;
46、根据所述目标车辆的侧方环境信息,确定出至少一个移动限制条件;
47、基于所述至少一个移动限制条件和所述避障策略,确定所述目标车辆的移动方向和移动距离;
48、根据所述目标车辆的移动方向和移动距离,确定所述目标车辆的安全位置。
49、可选的,所述第一采集模块在用于实时采集所述目标车辆正后方的监测车辆的运行数据和车辆基本信息时,所述第一采集模块用于:
50、通过安装于所述目标车辆后方的雷达和图像采集装置实时检测所述目标车辆正后方的监测车辆的运行数据和车辆基本信息。
51、可选的,所述第二采集模块在用于根据安装在所述目标车辆上的感知装置,获取所述目标车辆的侧方环境信息时,所述第二采集模块用于:
52、根据安装在所述目标车辆左侧和右侧的雷达和图像采集装置,获取所述目标车辆左侧环境信息和右侧环境信息。
53、可选的,所述预测模块在用于根据所述车辆基本信息确定所述监测车辆的车辆质量时,所述预测模块用于:
54、获取所述车辆基本信息中的所述监测车辆的车辆类型信息;
55、根据所述车辆类型信息,确定所述监测车辆的车辆质量。
56、本技术实施例还提供一种电子设备,包括:处理器、存储器和总线,所述存储器存储有所述处理器可执行的机器可读指令,当电子设备运行时,所述处理器与所述存储器之间通过总线通信,所述机器可读指令被所述处理器执行时执行如上述的避障方法的步骤。
57、本技术实施例还提供一种计算机可读存储介质,该计算机可读存储介质上存储有计算机程序,该计算机程序被处理器运行时执行如上述的避障方法的步骤。
58、本技术实施例提供的一种车辆躲避后方撞击的避障方法及装置,包括:目标车辆启动后,实时采集所述目标车辆正后方的监测车辆的运行数据和车辆基本信息;根据所述监测车辆的运行数据和车辆基本信息,预测所述监测车辆与所述目标车辆是否会发生碰撞,以及发生碰撞时的目标碰撞等级;根据所述发生碰撞时的目标碰撞等级,确定是否需要启动避障策略;若需要启动,采集所述目标车辆的周围环境信息,并根据所述避障策略和采集的周围环境信息确定所述目标车辆的安全位置;控制所述目标车辆从当前位置移动至所述安全位置。
59、这样,通过本技术公开的技术方案,可自动躲避后方车辆的撞击,更加全面的保障司乘人员的安全。
60、为使本技术的上述目的、特征和优点能更明显易懂,下文特举较佳实施例,并配合所附附图,作详细说明如下。
- 还没有人留言评论。精彩留言会获得点赞!