车辆制动力分配方法、装置和车载控制器与流程
本技术涉及控制领域,更具体的说,是涉及一种车辆制动力分配方法、装置和车载控制器。
背景技术:
1、随着制动系统集成化与轻量化、汽车电动化与智能化的不断发展,线控制动系统未来必将会成为汽车制动系统的主流选择,线控制动的安全性能尤为重要。
2、在线控制动过程中,车辆在制动时如果前轮先于后轮制动会导致车轮抱死,而如果后轮先于前轮抱死则会造成后轮侧滑,对驾驶员和乘客的安全又极大威胁。
3、因此,亟需一种能够对于车辆前后制动力分配的方法,以保证前后车轮的制动均衡。
技术实现思路
1、有鉴于此,本技术提供了一种车辆制动力分配方法、装置和车载控制器,如下:
2、一种车辆制动力分配方法,包括:
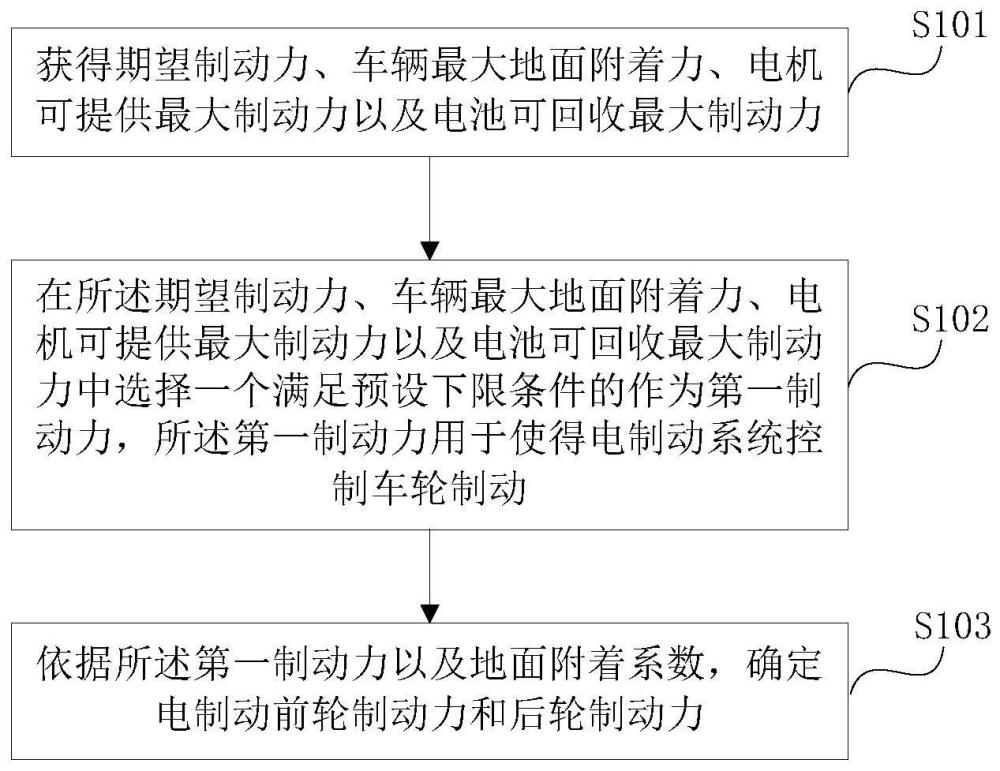
3、获得期望制动力、车辆最大地面附着力、电机可提供最大制动力以及电池可回收最大制动力;
4、在所述期望制动力、车辆最大地面附着力、电机可提供最大制动力以及电池可回收最大制动力中选择一个满足预设下限条件的作为第一制动力,所述第一制动力用于使得电制动系统控制车轮制动;
5、依据所述第一制动力以及地面附着系数,确定电制动前轮制动力和后轮制动力。
6、上述的方法,可选的,还包括:
7、依据所述期望制动力以及所述第一制动力确定第二制动力,所述第二制动力用于使得液刹系统控制车轮制动。
8、上述的方法,可选的,所述依据所述期望制动力以及所述第一制动力确定第二制动力,包括:
9、确定所述期望制动力与所述第一制动力的制动力差值;
10、基于所述制动力差值属于正数,将所述制动力差值作为第二制动力。
11、上述的方法,可选的,所述依据所述第一制动力以及地面附着系数,确定电制动前轮制动力和后轮制动力,包括:
12、以0为下限以所述第一制动力为上限值,依据预设步长,设定制动力集合,所述制动力集合包括按照从小到大的顺序排列的至少两个目标制动力;
13、在所述制动力集合中按照从小到大的顺序依次选择一个作为第一目标制动力;
14、依据所述第一目标制动力以及预设前后制动力分配曲线,确定与所述第一目标制动力对应的第一初始制动力和第二初始制动力,所述预设前后制动力分配曲线与地面附着系数相关;
15、依据所述第一初始制动力和第二初始制动力的差值以及预设差值阈值,确定第二目标制动力;
16、将所述第二目标制动力作为后轮制动力,将与所述第二目标制动力对应的第一目标制动力作为前轮制动力。
17、上述的方法,可选的,所述依据所述第一目标制动力以及预设前后制动力分配曲线,确定第一初始制动力和第二初始制动力,包括:
18、获得预设前后制动力分配曲线对应的第一曲线公式和第二曲线公式,所述第一曲线公式表示前轮制动力、后轮制动力与地面附着系数、车辆质量关系,所述第二曲线公式表示前轮制动力和后轮制动力与地面附着系数、车辆尺寸关系;
19、依据所述第一目标制动力与所述第一曲线公式,得到第一初始制动力;
20、依据所述第一目标制动力与所述第二曲线公式,得到第二初始制动力。
21、上述的方法,可选的,所述依据所述第一初始制动力和第二初始制动力的差值以及预设差值阈值,确定第二目标制动力,包括:
22、判断所述差值是否小于所述预设差值阈值,得到第一判断结果;
23、若所述第一判断结果表征第一初始制动力和第二初始制动力的差值不小于预设差值阈值,在所述制动力集合中选择大于且与所述第一目标制动力相邻的作为新的第一目标制动力,并执行依据所述第一目标制动力以及预设前后制动力分配曲线,确定与所述第一目标制动力对应的第一初始制动力和第二初始制动力步骤;
24、若所述第一判断结果表征第一初始制动力和第二初始制动力的差值小于预设差值阈值,记录所述第一初始制动力和所述第二初始制动力,依据所述差值更新所述预设差值阈值;
25、判断所述第一目标制动力与第一制动力是否相同,得到第二判断结果;
26、若所述第二判断结果表征所述第一目标制动力与第一制动力不同,在所述制动力集合中选择大于且与所述第一目标制动力相邻的作为新的第一目标制动力,并执行依据所述第一目标制动力以及预设前后制动力分配曲线,确定与所述第一目标制动力对应的第一初始制动力和第二初始制动力步骤;
27、若所述第二判断结果表征所述第一目标制动力与第一制动力相同,将记录的第一初始制动力和第二初始制动力取平均值得到第二目标制动力。
28、上述的方法,可选的,所述获得期望制动力、车辆最大地面附着力、电机可提供最大制动力以及电池可回收最大制动力,包括:
29、接收制动踏板开度;基于所述踏板开度与制动力的对应关系,确定所述制动踏板开度对应的期望制动力;
30、获得车辆质量和路面附着系数;依据所述车辆质量确定车辆重力;依据所述车辆重力以及所述路面附着系数,得到所述车辆最大地面附着力;
31、获得电机转速、主减速比和轮胎半径;依据所述电机转速确定电机能够提供最大制动力;基于所述电机能够提供最大制动力、主减速比和轮胎半径确定电机可提供最大制动力;
32、获得电池充电功率上限、电机发电效率、电机当前转速、主减速比以及轮胎半径;依据所述电池充电功率上限、所述电机发电效率、所述电机当前转速、所述主减速比以及所述轮胎半径,确定电池可回收最大制动力。
33、一种车辆制动力分配装置,包括:
34、获得模块,用于获得期望制动力、车辆最大地面附着力、电机可提供最大制动力以及电池可回收最大制动力;
35、选择模块,用于在所述期望制动力、车辆最大地面附着力、电机可提供最大制动力以及电池可回收最大制动力中选择一个满足预设下限条件的作为第一制动力,所述第一制动力用于使得电制动系统控制车轮制动;
36、确定模块,用于依据所述第一制动力以及地面附着系数,确定电制动前轮制动力和后轮制动力。
37、上述的方法,可选的,所述确定模块,包括:
38、设定单元,用于以0为下限以所述第一制动力为上限值,依据预设步长,设定制动力集合,所述制动力集合包括按照从小到大的顺序排列的至少两个目标制动力;
39、选择单元,用于在所述制动力集合中按照从小到大的顺序依次选择一个作为第一目标制动力;
40、第一确定单元,用于依据所述第一目标制动力以及预设前后制动力分配曲线,确定与所述第一目标制动力对应的第一初始制动力和第二初始制动力,所述预设前后制动力分配曲线与地面附着系数相关;
41、第二确定单元,用于依据所述第一初始制动力和第二初始制动力的差值以及预设差值阈值,确定第二目标制动力;
42、第三确定单元,用于将所述第二目标制动力作为后轮制动力,将与所述第二目标制动力对应的第一目标制动力作为前轮制动力。
43、一种车载控制器,其特征在于,包括:存储器、处理器;
44、其中,存储器存储有处理程序;
45、上述任一项所述的车辆制动力分配方法的各步骤。
46、综上所述,本技术提供的一种车辆制动力分配方法、装置和车载控制器,包括:获得期望制动力、车辆最大地面附着力、电机可提供最大制动力以及电池可回收最大制动力;在所述期望制动力、车辆最大地面附着力、电机可提供最大制动力以及电池可回收最大制动力中选择一个满足预设下限条件的作为第一制动力,所述第一制动力用于使得电制动系统控制车轮制动;依据所述第一制动力以及地面附着系数,确定电制动前轮制动力和后轮制动力。本实施例中,先确定电制动系统控制车轮制动的第一制动力,依据地面附着系数,对于该第一制动力进行分配,以使得前轮制动力和后轮制动力均衡,保证基于该前轮制动力和后轮制动力对于前轮和后轮分别进行制动控制,保证二者的制动均衡,不会出现车轮抱死或后轮侧滑的问题。
- 还没有人留言评论。精彩留言会获得点赞!