一种港口转运车电控制动系统及控制方法与流程
本发明属于自动驾驶,涉及转运车的电控制动,具体涉及到一种港口转运车电控制动系统及控制方法。
背景技术:
1、目前港口集装箱转运车的车辆均为重卡,随着重卡驾驶人员的短缺和智能驾驶技术的发展,无人化港口或传统港口无人化改造的需求越来越强烈,对港口内集装箱转运车的需求也是向无人化,智能驾驶方向发展,那么就要求港口集装箱转运车标配电控制动系统,电控制动系统是智能驾驶的安全系统,是非常重要的系统。
2、现有港口集装箱转运车为带驾驶室的牵引车+挂车组成,制动系统采用常规的气压制动,制动器为鼓式制动,配备基本的abs防抱死系统功能,具有较多缺陷:
3、1.均为驾驶员驾驶,有制动踏板,制动响应时间较长;
4、2.无法实时监控相关硬件的故障,无法实时监控制动压力,无法实时监控行车制动减速等等。
技术实现思路
1、针对上述问题,本发明的主要目的在于设计一种港口转运车电控制动系统及控制方法,解决港口转运车的制动缺陷,以提升港口集装箱转运车的智能化、无人化及工作效率。
2、为了实现上述目的本发明采用如下技术方案:
3、一种港口转运车电控制动系统,用于车辆的制动,该系统包括:
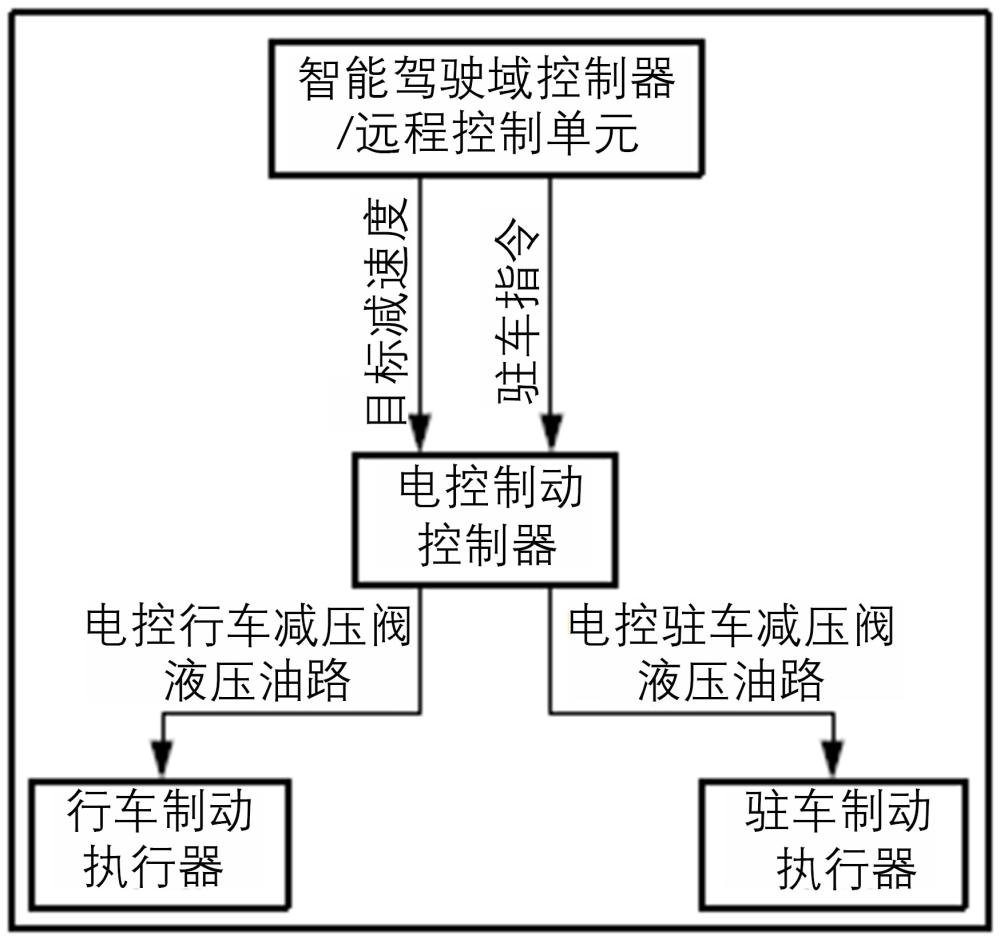
4、智能驾驶域控制器/远程控制单元,用于发送请求指令和车辆重量信号,所述请求指令包括减速度请求指令、驻车请求指令,所述驻车请求指令包括驻车夹紧请求指令、驻车释放请求指令;
5、电控制动控制器,用于接收所述智能驾驶域控制器/远程控制单元发送的请求指令和车辆重量信号;
6、行车制动执行器,用于执行减速度请求指令,产生制动力,使车辆减速或者停车;
7、驻车制动执行器,用于执行驻车夹紧请求指令,产生制动力,使车辆进行驻车制动夹紧,或者用于执行驻车释放请求指令,释放制动力,使车辆驻车制动释放实现行车。
8、作为本发明进一步的描述,所述智能驾驶域控制器/远程控制单元通过can信号连接到所述电控制动控制器,所述行车制动执行器通过电控行车制动减压阀连接到所述电控制动控制器,所述驻车制动执行器通过电控驻车制动减压阀连接到所述电控制动控制器。
9、作为本发明进一步的描述,所述行车制动执行器设置为行车制动卡钳,所述行车制动卡钳通过油缸进行摩擦片与制动盘进行夹紧或者松开;所述驻车制动执行器设置为驻车制动卡钳,所述驻车制动卡钳通过油缸推动内部弹簧进行摩擦片的夹紧或者松开;
10、所述电控行车制动减压阀与所述行车制动卡钳之间设有电控行车换向阀, 所述电控驻车制动减压阀与所述驻车制动卡钳之间设有电控驻车换向阀,所述电控行车换向阀与所述电控驻车换向阀均连接到所述电控制动控制器。
11、作为本发明进一步的描述,该系统还包括依次连接的油箱、电控齿轮泵、电控蓄能器,所述电控蓄能器分别连接到所述电控制动控制器、电控行车制动减压阀、电控驻车制动减压阀,所述电控齿轮泵连接到所述电控制动控制器;
12、所述电控制动控制器还连接有轮速传感器、第一压力传感器、第二压力传感器;所述第一压力传感器连接到所述电控蓄能器,所述第二压力传感器分别连接到所述电控行车制动减压阀与所述电控驻车制动减压阀。
13、作为本发明进一步的描述,所述电控行车换向阀与所述电控驻车换向阀均连接到所述油箱,所述油箱中存放液压油。
14、作为本发明进一步的描述,所述第二压力传感器包括行车制动压力传感器与驻车压力传感器,所述行车制动压力传感器连接到所述电控行车制动减压阀,所述驻车压力传感器连接到所述电控驻车制动减压阀。
15、一种港口转运车电控制动方法,该制动方法基于上述的制动系统,其包括行车制动控制方法;
16、所述行车制动控制方法包括行车制动和行车制动解除,包括如下步骤:
17、s101:智能驾驶域控制器或远程控制单元发送减速度请求指令与车辆重量信号到电控制动控制器;
18、s102:电控制动控制器根据车辆重量信号与请求的目标减速度,计算整车制动力并输出制动力矩;
19、s103:通过制动力矩计算电控行车制动减压阀的目标制动压力,并通过制动压力与电流的匹配关系,计算出电控行车制动减压阀的电流;
20、s104:电控制动控制器通过计算出的电流,将电控行车制动减压阀与电控行车制动换向阀打开,油箱中的液压油,依次经过电控齿轮泵、电控蓄能器、电控行车制动减压阀、电控行车换向阀到达车辆的行车制动卡钳,通过目标制动压力推动行车制动卡钳的油缸使摩擦片与制动盘夹紧,产生制动力,使车辆减速或停车;
21、s105:车辆解除行车制动时,电控制动控制器将电控行车制动减压阀关闭及电控行车制动换向阀换向,行车制动卡钳中的液压油经过电控行车换向阀回到油箱,行车制动卡钳的油缸缩回使摩擦片与制动盘松开,使车辆解除行车制动。
22、作为本发明进一步的描述,该制动方法还包括驻车制动控制方法;
23、所述驻车制动控制方法包括驻车和驻车释放,包括如下步骤:
24、s201:智能驾驶域控制器或远程控制单元发送驻车请求指令到电控制动控制器;
25、s202:电控制动控制器将驻车夹紧请求指令转换为电控驻车制动减压阀的电流信号,并通过电流信号控制电控驻车制动减压阀关闭;
26、s203:液压油通过电控驻车换向阀流回油箱,驻车制动卡钳通过内部弹簧产生机械力将摩擦片与制动盘夹紧,使车辆驻车;
27、s204:电控制动控制器将驻车释放请求指令转换为电控驻车制动减压阀的电流信号,并通过电流信号控制电控驻车制动减压阀打开和电控驻车换向阀换向;
28、s205:油箱中的液压油,依次经过电控齿轮泵、电控蓄能器、电控驻车制动减压阀、电控驻车换向阀到达车辆的驻车制动卡钳,驻车制动卡钳的油缸推动内部弹簧压缩,使摩擦片与制动盘松开,使车辆驻车释放。
29、作为本发明进一步的描述,在车辆的行车制动过程中,还包括电控制动控制器根据轮速传感器获得轮速,将轮速转换为车速,并计算出车辆的实际减速度,将计算出的实际减速度与减速度请求的目标减速度对比进行pi反馈控制,使行车的实际减速度与目标减速度接近;电控制动控制器根据制动压力传感器获取车辆的实际制动压力,实际制动压力与目标制动压力对比进行pi反馈控制,使车辆的实际制动压力与目标制动压力接近;
30、在车辆的驻车制动过程中,还包括电控制动控制器根据驻车压力传感器获取车辆的实际驻车制动压力,实际驻车制动压力与目标驻车制动压力对比进行pi反馈控制,使车辆的实际驻车制动压力与目标驻车制动压力接近;
31、所述目标驻车制动压力通过驻车制动卡钳的内部弹簧压缩到极限的力进行计算求得。
32、一种车辆,该车辆包括上述的制动系统,并实现上述的制动方法。
33、相对于现有技术,本发明的技术效果为:
34、本发明提供了一种港口转运车电控制动系统及控制方法,包括智能驾驶域控制器/远程控制单元、电控制动控制器、电控齿轮泵、电控蓄能器、电控行车减压阀、电控驻车减压阀、电控行车换向阀、电控驻车换向阀、第一压力传感器、第二压力传感器、轮速传感器、油箱、行车制动卡钳、驻车制动卡钳,零部件的集成度高,且通过电控制动响应时间短,在行车制动过程中,采用目标减速度与车辆重量进行制动减速度与目标制动压力的计算,配合轮速传感器获取的实际减速度,提供了减速度闭环控制逻辑,实时监控车辆减速度,配合行车制动压力传感器,提供了制动压力闭环控制,实时监控制动压力,同时在驻车制动过程中,采用驻车压力传感器,将实际驻车制动压力与目标驻车制动压力对比,便于驻车制动压力的监控与实时调节,有利于港口转运车智能化、无人化的电控制动。
- 还没有人留言评论。精彩留言会获得点赞!