泊车距离控制方法、电子设备及存储介质与流程
本技术涉及车辆驾驶,特别是涉及一种泊车距离控制方法、电子设备及存储介质。
背景技术:
1、泊车距离控制(parking distance control,pdc)系统是以声波测距的方式,探测靠近车辆的物体,以听觉和视觉的方式表示物体的距离,在低速行驶或倒车过程中,测量车辆与物体之间的距离,并通过全景式监控影像系统(around view monitor,avm)进行显示,用于提示驾驶员,以减少碰撞的发生。
2、但是,一些方案得到的用于表征车辆与物体之间距离的超声波弧段存在曲线平滑度较差的问题,并且计算过程繁琐。
技术实现思路
1、本技术提供了一种泊车距离控制方法、电子设备及存储介质,以解决上述问题。
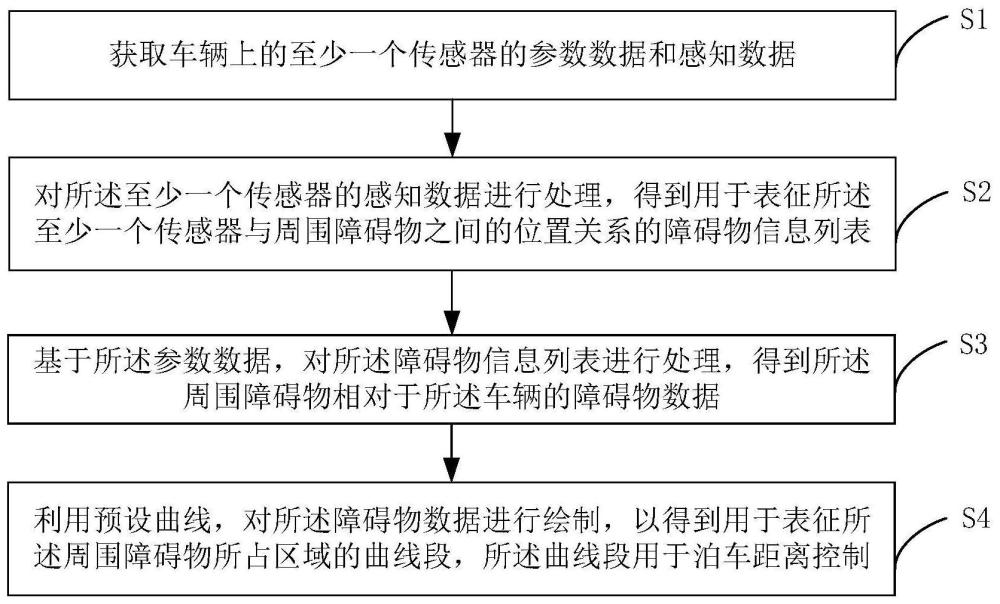
2、本技术第一方面提供了一种泊车距离控制方法,包括:获取车辆上的至少一个传感器的参数数据和感知数据;对所述至少一个传感器的感知数据进行处理,得到用于表征所述至少一个传感器与周围障碍物之间的位置关系的障碍物信息列表;基于所述参数数据,对所述障碍物信息列表进行处理,得到所述周围障碍物相对于所述车辆的障碍物数据;利用预设曲线,对所述障碍物数据进行绘制,以得到用于表征所述周围障碍物所占区域的曲线段,所述曲线段用于泊车距离控制。
3、在一些实施例中,所述至少一个传感器的中每个传感器的所述感知数据包括所述传感器对应的传感器索引以及所述传感器感知得到的周围障碍物距离;对所述至少一个传感器的感知数据进行处理,得到用于表征所述至少一个传感器与周围障碍物之间的位置关系的障碍物信息列表,包括:响应于所述至少一个传感器中的相邻传感器对应的周围障碍物距离位于相同或相邻的预设分区中,则对所述相邻传感器相应的传感器索引和周围障碍物距离进行合并处理,得到用于表征所述相邻传感器与周围障碍物之间的位置关系的第一数据对;其中,所述预设分区是对所述车辆周围环境区域按照预设距离划分得到的;响应于所述至少一个传感器中的相邻传感器对应的周围障碍物距离不位于相同或相邻的预设分区中,则分别保留相应的传感器索引和周围障碍物距离,分别得到用于表征传感器与周围障碍物之间的位置关系的第二数据对;将所述第一数据对和所述第二数据对按照预设排列方式进行排序,以得到所述障碍物信息列表。
4、在一些实施例中,所述预设排列方式包括:按照所述传感器索引从小到大的顺序进行排列。
5、在一些实施例中,所述障碍物信息列表包括用于表征所述至少一个传感器中每个传感器与周围障碍物之间的位置关系的至少一个数据对,其中所述至少一个数据对中的每个数据对包括相应的传感器索引以及相应传感器所感知到的周围障碍物距离;所述至少一个传感器的参数数据包括所述至少一个传感器相对于所述车辆的传感器位置数据和传感器朝向数据;基于所述参数数据,对所述障碍物信息列表进行处理,得到所述周围障碍物相对于所述车辆的障碍物数据,包括:将每个所述数据对中的所述传感器索引对应的所述周围障碍物距离与相应的所述传感器朝向数据的乘积的转置,加上相应的所述传感器位置数据,以得到所述周围障碍物相对于所述车辆的至少一个障碍物位置数据,从而得到所述车辆的障碍物数据。
6、在一些实施例中,所述参数数据还包括传感器感知角度数据;基于所述参数数据,对所述障碍物信息列表进行处理,得到所述周围障碍物相对于所述车辆的障碍物数据,进一步包括:获取所述传感器感知角度数据的平均值的正切函数值与预设平滑参数和预设弧长参数之间的商值,再获取所述商值反正切函数值,以得到边缘角数据;将所述至少一个数据对中的第一个数据对中所述传感器索引对应的周围障碍物距离加上预设平滑参数,再与相应的所述传感器朝向数据相乘后基于所述边缘角数据进行转置处理,最后加上相应的所述传感器位置数据,以得到第一边缘点数据;将所述至少一个数据对中的最后一个数据对中所述传感器索引对应的周围障碍物距离加上预设平滑参数,再与相应的所述传感器朝向数据相乘后基于所述边缘角数据进行转置处理,最后加上相应的所述传感器位置数据,以得到第二边缘点数据;将所述至少一个障碍物位置数据、所述第一边缘点数据以及所述第二边缘点数据中的每一个减去相应的所述传感器位置数据,再加上相应的所述传感器朝向数据与预设平滑参数的乘积的转置,以得到所述周围障碍物相对于所述车辆的至少一个障碍物法线数据;将所述至少一个障碍物位置数据、所述第一边缘点数据以及所述第二边缘点数据中的每一个按照预设分区设置预设颜色,以得到至少一个障碍物颜色数据;其中,所述预设分区是将所述车辆周围环境区域按照预设距离划分得到的;将所述至少一个障碍物位置数据、所述第一边缘点数据、所述第二边缘点数据、至少一个障碍物法线数据以及至少一个障碍物颜色数据确定为所述障碍物数据。
7、在一些实施例中,利用预设曲线,对所述障碍物数据进行绘制,以得到用于表征所述周围障碍物所占区域的曲线段,包括:利用预设曲线,对所述第一边缘点数据、所述至少一个障碍物位置数据以及所述第二边缘点数据中的相邻两个分别进行处理,以得到所述至少一个障碍物位置数据中每一个对应的第一辅助点数据和第二辅助点数据;利用所述第一辅助点数据和所述第二辅助点数据,对所述第一边缘点数据、所述至少一个障碍物位置数据以及所述第二边缘点数据中相邻两个数据之间进行插值处理,以得到至少一个障碍物目标点数据;对所述第一边缘点数据、所述至少一个障碍物位置数据以及所述第二边缘点数据中相邻两个数据对应的障碍物法线数据进行插值处理,以得到至少一个障碍物目标法线数据;对所述第一边缘点数据、所述至少一个障碍物位置数据以及所述第二边缘点数据中相邻两个数据对应的障碍物颜色数据进行插值处理,以得到至少一个障碍物目标点颜色数据;利用所述至少一个障碍物目标点数据、所述至少一个障碍物目标法线数据以及所述至少一个障碍物目标点颜色数据,绘制得到用于表征所述周围障碍物所占区域的曲线段。
8、在一些实施例中,利用所述至少一个障碍物目标点数据、所述至少一个障碍物目标法线数据以及所述至少一个障碍物目标点颜色数据,绘制得到用于表征所述周围障碍物所占区域的曲线段,包括:利用所述至少一个障碍物目标点数据中的相邻两个障碍物目标点数据及其对应的障碍物目标法线数据,确定至少一个填充区域;利用所述相邻两个障碍物目标点数据对应的障碍物目标点颜色数据的平均值,按照预设填充方式,对相应的所述填充区域进行填充处理,从而得到所述用于表征所述周围障碍物所占区域的曲线段。
9、在一些实施例中,所述泊车距离控制方法,进一步包括:显示所述周围障碍物距离。
10、本技术第二方面提供了一种电子设备,包括相互耦接的存储器和处理器,所述处理器用于执行所述存储器中存储的程序指令,以实现上述第一方面中的泊车距离控制方法。
11、本技术第三方面提供了一种非易失性计算机可读存储介质,所述计算机可读存储介质用于存储程序指令,所述程序指令在被处理器执行时,用于实现上述第一方面中的泊车距离控制方法。
12、上述方案,获取车辆上的至少一个传感器的参数数据和感知数据,通过对至少一个传感器的感知数据进行处理,得到用于表征至少一个传感器与周围障碍物之间的位置关系的障碍物信息列表;通过基于参数数据,对障碍物信息列表进行处理,得到周围障碍物相对于车辆的障碍物数据;利用预设曲线,对障碍物数据进行绘制,以得到用于表征周围障碍物所占区域的曲线段,进而利用曲线段进行泊车距离控制;本技术中的方案,通过预设曲线对障碍物数据进行绘制,得到的用于表征周围障碍物所占区域的曲线段更加平滑,能够更好的体现周围障碍物与车辆之间的位置关系,提高驾驶安全性。
13、应当理解的是,以上的一般描述和后文的细节描述仅是示例性和解释性的,而非限制本技术。
- 还没有人留言评论。精彩留言会获得点赞!