用于水下地质探测的水陆两栖机器人及其运动控制方法与流程
本发明属于水陆两栖推进装置,具体涉及一种用于水下地质探测的水陆两栖机器人及其运动控制方法。
背景技术:
1、随着社会经济的发展,针对海洋资源特别是海底矿产资源的勘探开发越来越受各国重视,对相关的水下地质探测装备的需求也越来越高。传统的水下探测装备大多采用螺旋桨驱动方式,但是螺旋桨驱动形式噪声大、效率低、隐身性能较差。另外,传统的水下探测装备基本都只能在海洋中工作,缺少陆地上基本行进功能的拓展,使得装备在陆地上变得相对笨重,其搬运、布放和回收也都困难很多,缺少水陆两栖适应能力。
技术实现思路
1、针对相关技术中存在的不足之处,本发明提供一种用于水下地质探测的水陆两栖机器人及其运动控制方法,旨在实现水下地质探测装备的水陆两栖应用,提高其水陆两栖适应能力。
2、本发明的用于水下地质探测的水陆两栖机器人,包括:
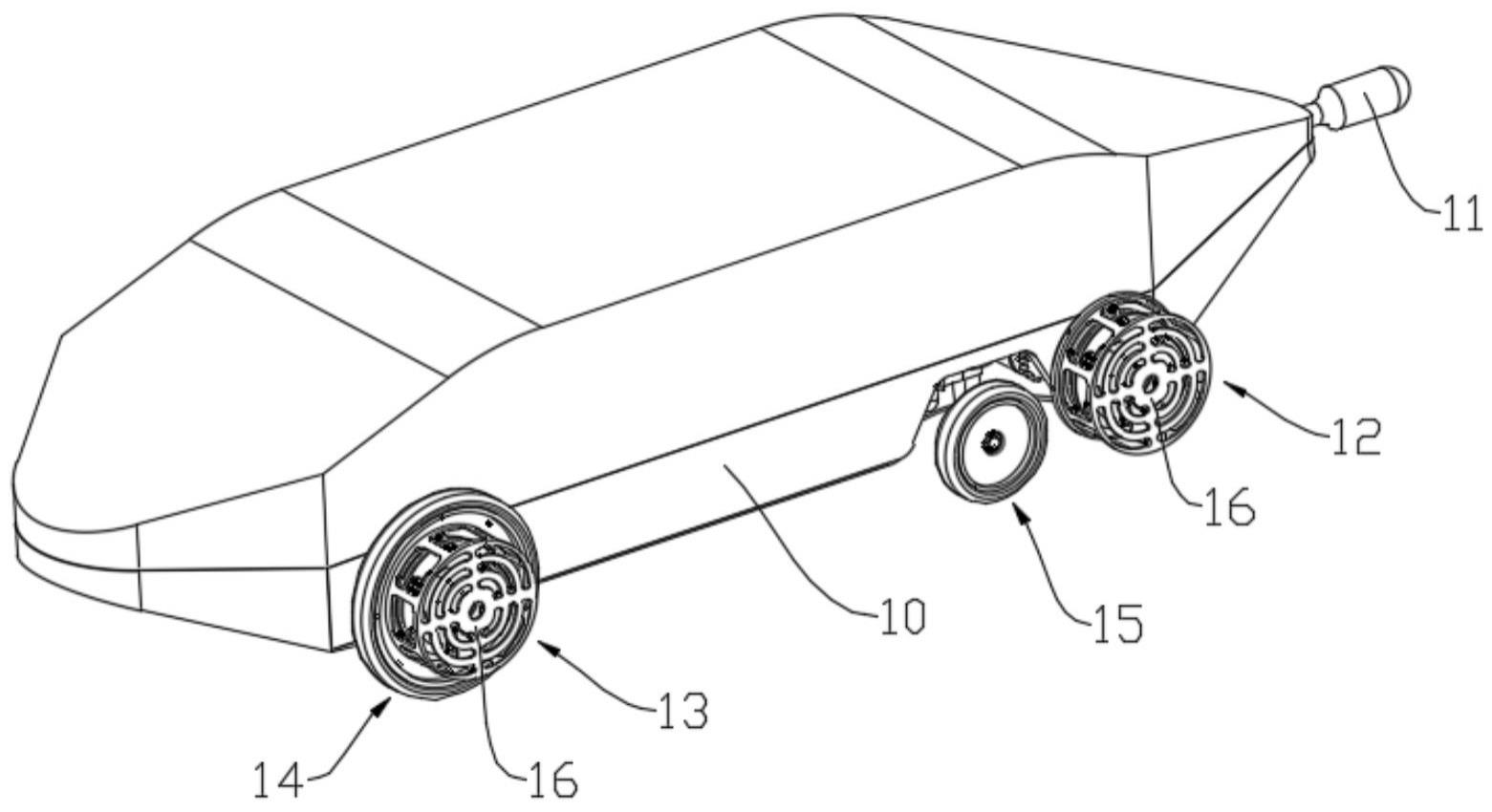
3、舱体,舱体的前端设有水下地质探测装置;
4、水下推进装置,包括分别布设于舱体前部和后部的水下前推进机构和水下后推进机构;水下前推进机构和水下后推进机构均包括:
5、两个驱动轮组,分别连接于舱体外壁的左右两侧,每一驱动轮组包括轨道盘、转盘和拨片组件;轨道盘转动连接于舱体上,轨道盘的外侧面凹设有一圈导向槽;转盘转动连接于轨道盘外侧;拨片组件连接于转盘外周,拨片组件的一端贯穿转盘插设于导向槽内,并与导向槽滑动连接;拨片组件包括设于转盘外侧的拨片;两个转盘之间连接有一水下传动轴;
6、水下驱动电机和两个水下调节电机;两个水下调节电机分别与两个轨道盘连接,用于分别驱动两个轨道盘转动;水下驱动电机与水下传动轴连接,用于驱动两个转盘同步转动,以带动拨片运动,形成水下推进力;
7、陆地行进装置,包括:
8、分别连接于舱体前部左右两侧的两个前轮、分别连接于舱体后部左右两侧的两个后轮;两个前轮之间连接有一连杆传动机构;两个后轮之间连接有一陆地传动轴;
9、陆地转向电机和陆地驱动电机;陆地转向电机与连杆传动机构连接,用于驱动两个前轮同步转向;陆地驱动电机与陆地传动轴连接,用于驱动两个后轮同步转动,形成陆地行进力。
10、上述技术方案,能够使水陆两栖机器人同时具备水下推进功能和陆地行进功能,由此实现了水下地质探测装备的水陆两栖应用,提高其水陆两栖适应能力。
11、在其中一些实施例中,导向槽包括圆弧段和直段;转盘的转动中心位于圆弧段的轴线上;拨片组件还包括夹设于转盘与轨道盘之间的转臂;转臂朝向转盘一侧的中部凸设有转轴,转轴贯穿转盘并与其转动连接,拨片连接于转轴露出转盘的一端;转臂朝向轨道盘一侧的端部凸设有导杆,导杆插设于导向槽内并与其滑动连接;拨片呈圆弧形;导杆在导向槽圆弧段滑动时,拨片的轴线与圆弧段的轴线共线;导杆在导向槽直段滑动时,拨片的中轴面与直段平行。该技术方案提高了水下推进效率,且降低噪声。
12、在其中一些实施例中,转盘朝向转臂的一侧凸设有限位柱,导杆在导向槽圆弧段滑动时,限位柱抵接于转臂的一侧面上。
13、在其中一些实施例中,每一驱动轮组包括多个拨片组件,多个拨片组件绕转盘的转动中心间隔均匀布设。
14、在其中一些实施例中,水下后推进机构中的两个轨道盘分别为两个后轮的轮毂,陆地传动轴的两端分别与该两个轨道盘连接,陆地驱动电机与其中一轨道盘连接,以经陆地传动轴和该两个轨道盘驱动两个后轮同步转动;陆地传动轴包括两个同轴设置的陆地传动半轴,两个陆地传动半轴之间设有第一离合器,用于使两个陆地传动半轴之间相互连接或脱开;陆地驱动电机为水下后推进机构中的一水下调节电机;水下后推进机构中的另一水下调节电机与其连接的轨道盘之间设有第二离合器,用于使该水下调节电机与轨道盘之间相互连接或脱开。该技术方案能够实现陆地后驱动机构和水下后推进机构之间的灵活切换,实现水陆两栖机器人整体结构布局的紧凑化。
15、在其中一些实施例中,水下后推进机构中的水下驱动电机与水下传动轴之间设有第三离合器,用于使该水下驱动电机与水下传动轴之间相互连接或脱开。
16、在其中一些实施例中,连杆传动机构包括滑块、两个拉杆和两个转杆;滑块滑动连接于舱体内并可左右滑动;两个转杆的上端分别与舱体转动连接,下端分别与两个前轮的轮轴连接,转杆的侧面凸设有推臂;两个拉杆的一端分别与滑块转动连接,另一端分别与两个推臂转动连接;陆地转向电机与滑块连接,用于驱动滑块滑动,以带动两个前轮同步转向。
17、本发明还提供一种用于水下地质探测的水陆两栖机器人的运动控制方法,采用前述的水陆两栖机器人进行;运动控制方法包括:
18、水下推进控制方法,通过四个水下调节电机分别调节四个轨道盘上导向槽直段的方位,通过两个水下驱动电机驱动四个转盘转动,带动四个驱动轮组中的拨片运动,形成水下推进力,以实现水陆两栖机器人在水下的直行、转向及升降;
19、陆地行进控制方法,通过陆地驱动电机驱动两个后轮转动,通过陆地转向电机驱动两个前轮转向,以实现水陆两栖机器人在陆地上的直行及转向。
20、在其中一些实施例中,水下推进控制方法具体包括:
21、将第一离合器断电分离,将第二离合器和第三离合器上电接合;
22、水陆两栖机器人在水下直行前进时,首先启动四个水下调节电机,分别将四个轨道盘上导向槽直段调整至正下水平方位;然后启动两个水下驱动电机,驱动四个转盘转动以带动拨片运动,实现水下直行前进;
23、水陆两栖机器人在水下直行后退时,首先启动四个水下调节电机,分别将四个轨道盘上导向槽直段调整至正上水平方位;然后启动两个水下驱动电机,驱动四个转盘转动以带动拨片运动,实现水下直行后退;
24、水陆两栖机器人在水下上升时,首先启动四个水下调节电机,分别将四个轨道盘上导向槽直段调整至正前竖直方位;然后启动两个水下驱动电机,驱动四个转盘转动以带动拨片运动,实现水下上升;
25、水陆两栖机器人在水下下降时,首先启动四个水下调节电机,分别将四个轨道盘上导向槽直段调整至正后竖直方位;然后启动两个水下驱动电机,驱动四个转盘转动以带动拨片运动,实现水下下降;
26、水陆两栖机器人在水下左转时,首先启动四个水下调节电机,将舱体左侧的两个轨道盘上导向槽直段调整至正上水平方位,将舱体右侧的两个轨道盘上导向槽直段调整至正下水平方位;然后启动两个水下驱动电机,驱动四个转盘转动以带动拨片运动,实现水下左转;
27、水陆两栖机器人在水下右转时,首先启动四个水下调节电机,将舱体左侧的两个轨道盘上导向槽直段调整至正下水平方位,将舱体右侧的两个轨道盘上导向槽直段调整至正上水平方位;然后启动两个水下驱动电机,驱动四个转盘转动以带动拨片运动,实现水下右转。
28、在其中一些实施例中,陆地行进控制方法具体包括:
29、将第二离合器和第三离合器断电分离,将第一离合器上电接合;
30、启动陆地驱动电机以驱动两个后轮同步转动,通过控制陆地驱动电机的转动方向,实现水陆两栖机器人在陆地上的直行前进或直行后退;当水陆两栖机器人在直行中需要转向时,启动陆地转向电机以驱动两个前轮同步转向,通过控制陆地转向电机的转动方向,实现水陆两栖机器人在陆地上的左转或右转。
31、基于上述技术方案,本发明实施例中的用于水下地质探测的水陆两栖机器人及其运动控制方法,实现了水下地质探测装备的水陆两栖应用,提高其水陆两栖适应能力。
- 还没有人留言评论。精彩留言会获得点赞!