滑行能量回收的控制方法、控制装置、车辆及存储介质与流程
本公开涉及车辆,尤其涉及一种滑行能量回收的控制方法、控制装置、车辆及存储介质。
背景技术:
1、目前,大多数车辆都具备能量回收功能,通常采用多种固定强度等级的能量回收模式进行能量回收。车辆在具有滑行能量回收的需求时,从多种固定强度等级的能量回收模式中选择其中一种强度等级的能量回收模式来进行能量回收。
2、在车辆处于单踏板驾驶模式时,驾驶员踩下加速踏板,车辆按照驾驶员所踩下的踏板深度进行加速,驾驶员松开加速踏板,车辆通过电机进行减速,电机输出相应的制动力,从而对滑行能量进行回收。
技术实现思路
1、为克服相关技术中存在的问题,本公开提供一种滑行能量回收的控制方法、控制装置、车辆及存储介质。
2、根据本公开实施例的第一方面,提供一种滑行能量回收的控制方法,所述滑行能量回收的控制方法包括:
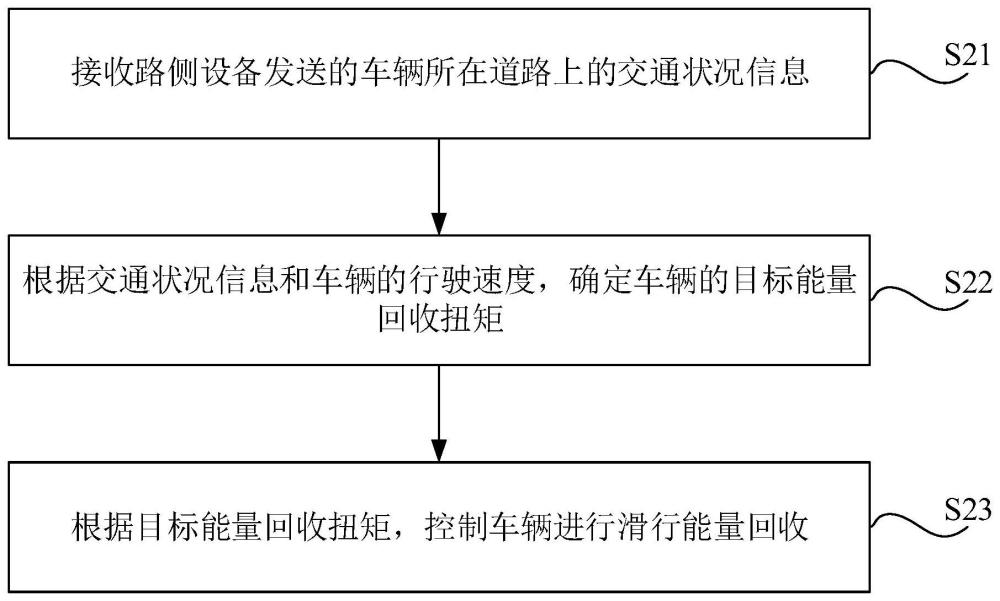
3、接收路侧设备发送的车辆所在道路上的交通状况信息;
4、根据所述交通状况信息和所述车辆的行驶速度,确定所述车辆的目标能量回收扭矩;
5、根据所述目标能量回收扭矩,控制所述车辆进行滑行能量回收。
6、可选地,在根据所述交通状况信息和所述车辆的行驶速度,确定所述车辆的目标能量回收扭矩之前,所述滑行能量回收的控制方法还包括:
7、确定所述车辆的当前驾驶模式为单踏板模式且加速踏板的开度小于第一预设开度。
8、可选地,所述根据所述交通状况信息和所述车辆的行驶速度,确定所述车辆的目标能量回收扭矩,包括:
9、根据所述交通状况信息确定所述车辆的当前行驶场景;
10、至少根据所述当前行驶场景和所述车辆的行驶速度,确定所述车辆的目标能量回收扭矩。
11、可选地,所述至少根据所述当前行驶场景和所述车辆的行驶速度,确定所述车辆的目标能量回收扭矩,包括:
12、若所述当前行驶场景为第一目标行驶场景,且所述车辆的行驶速度小于或等于所述第一目标行驶场景对应的参考速度,则将第一预设扭矩和当前最大能量回收扭矩中的最小者确定为所述车辆的目标能量回收扭矩;
13、其中,所述第一目标行驶场景为无前车直线行驶场景、弯道行驶场景、跟车行驶场景和途径路口行驶场景中的任一者,所述无前车直线行驶场景对应的参考速度为道路的限速值,所述弯道行驶场景对应的参考速度为弯道的限速值,所述跟车行驶场景对应的参考速度为前车的行驶速度,所述途径路口行驶场景对应的参考速度为路口通行速度。
14、可选地,所述至少根据所述当前行驶场景和所述车辆的行驶速度,确定所述车辆的目标能量回收扭矩,还包括:
15、若所述当前行驶场景为所述无前车直线行驶场景或所述跟车行驶场景,且所述车辆的行驶速度大于所述道路的限速值,则通过以下公式确定所述车辆的第二预设扭矩t2:
16、
17、其中,k和m为所述车辆的标定值,v0表征所述车辆的行驶速度,vlimt表征所述道路的限速值,t表征从所述车辆的行驶速度减小至所述道路的限速值的预设时长;
18、将所述第二预设扭矩和当前最大能量回收扭矩中的最小者确定为所述车辆的目标能量回收扭矩。
19、可选地,所述至少根据所述当前行驶场景和所述车辆的行驶速度,确定所述车辆的目标能量回收扭矩,包括:还包括:
20、若所述当前行驶场景为跟车行驶场景且所述车辆的行驶速度大于前车的行驶速度,则通过以下公式确定所述车辆的第三预设扭矩t3:
21、
22、其中,k和m为所述车辆的标定值,v0表征所述车辆的行驶速度,vfrnt表征前车的行驶速度,lbtm表征所述车辆与所述前车的距离值,lsf表征预设的安全跟车距离值;
23、将所述第三预设扭矩和当前最大能量回收扭矩中的最小者确定为所述车辆的目标能量回收扭矩。
24、可选地,所述至少根据所述当前行驶场景和所述车辆的行驶速度,确定所述车辆的目标能量回收扭矩,包括:还包括:
25、若所述当前行驶场景为弯道行驶场景且所述车辆的行驶速度大于弯道的限速值,则通过以下公式确定所述车辆的第四预设扭矩t4:
26、
27、其中,k和m为所述车辆的标定值,v0表征所述车辆的行驶速度,vslp表征弯道的限速值,lslp表征所述车辆与所述弯道的距离值;
28、将所述第四预设扭矩和当前最大能量回收扭矩中的最小者确定为所述车辆的目标能量回收扭矩。
29、可选地,所述至少根据所述当前行驶场景和所述车辆的行驶速度,确定所述车辆的目标能量回收扭矩,包括:
30、若所述当前行驶场景为途径路口场景,交通灯为绿灯且所述车辆的行驶速度大于路口通行速度,则通过以下公式确定所述车辆的第五预设扭矩t5:
31、
32、其中,k和m为所述车辆的标定值,v0表征所述车辆的行驶速度,vcross表征所述路口通行速度,lcross表征所述车辆与路口的距离值;
33、将所述第五预设扭矩和当前最大能量回收扭矩中的最小者确定为所述车辆的目标能量回收扭矩。
34、可选地,所述至少根据所述当前行驶场景和所述车辆的行驶速度,确定所述车辆的目标能量回收扭矩,包括:
35、若所述当前行驶场景为途径路口场景,交通灯为红灯或黄灯且所述车辆的行驶速度大于路口通行速度,则通过以下公式确定所述车辆的第六预设扭矩t6:
36、
37、其中,k和m为所述车辆的标定值,v0表征所述车辆的行驶速度,lcross表征所述车辆与路口的距离值;
38、将所述第六预设扭矩和当前最大能量回收扭矩中的最小者确定为所述车辆的目标能量回收扭矩。
39、可选地,所述至少根据所述当前行驶场景和所述车辆的行驶速度,确定所述车辆的目标能量回收扭矩,包括:
40、若所述当前行驶场景为拥堵行驶场景,则通过以下公式确定所述车辆的第七预设扭矩t7:
41、
42、其中,k和m为所述车辆的标定值,v0表征所述车辆的行驶速度,lbtm表征所述车辆与拥堵路段的距离值,lsfb表征预设的安全刹停距离;
43、将所述第七预设扭矩和当前最大能量回收扭矩中的最小者确定为所述车辆的目标能量回收扭矩。
44、可选地,所述至少根据所述当前行驶场景和所述车辆的行驶速度,确定所述车辆的目标能量回收扭矩,包括:
45、若所述当前行驶场景为突现障碍物场景且根据所述车辆的行驶速度确定车辆与障碍物的距离逐渐减小,则将当前最大能量回收扭矩确定为所述车辆的目标能量回收扭矩。
46、根据本公开实施例的第二方面,提供一种滑行能量回收的控制装置,所述滑行能量回收的控制装置包括:
47、接收模块,被配置为接收路侧设备发送的车辆所在道路上的交通状况信息;
48、第一确定模块,被配置为根据所述交通状况信息和所述车辆的行驶速度,确定所述车辆的目标能量回收扭矩;
49、控制模块,被配置为根据所述目标能量回收扭矩,控制所述车辆进行滑行能量回收。
50、根据本公开实施例的第三方面,提供一种车辆,所述车辆与路测设备处于通信状态,所述车辆包括:
51、第一处理器;
52、用于存储处理器可执行指令的存储器;
53、其中,所述处理器被配置为运行所述可执行指令,以实现本公开第一方面所述滑行能量回收的控制方法的步骤。
54、根据本公开实施例的第四方面,提供一种计算机可读存储介质,其上存储有计算机程序指令,该程序指令被处理器执行时实现本公开第一方面所提供的滑行能量回收的控制方法的步骤。
55、采用上述技术方案,根据路侧设备发送的车辆所在道路上的交通状况信息和车辆的行驶速度,确定车辆的目标能量回收扭矩,并根据所确定的目标能量回收扭矩控制车辆进行滑行能量回收,如此,既可以充分回收滑行能量,提升车辆续航里程,还可以提升用户驾驶体验。此外,利用路侧设备发送的车辆所在道路上的交通状况信息,降低车辆的硬件成本。
56、应当理解的是,以上的一般描述和后文的细节描述仅是示例性和解释性的,并不能限制本公开。
- 还没有人留言评论。精彩留言会获得点赞!