一种汽车蠕行起步控制方法及系统与流程
本技术涉及汽车,具体涉及一种汽车蠕行起步控制方法及系统。
背景技术:
1、新能源汽车越来越受到市场用户的青睐,当新能源汽车不具有坡道辅助功能的情况下,新能源汽车在上坡坡道上蠕行起步时,会发生溜坡的现象;
2、现有技术中,当新能源汽车中无坡道辅助功能时,在坡道松刹车的时候,蠕行扭矩才开始建立交换,且初始扭矩较小,当车辆发生溜坡现象后,蠕行扭矩计算模块才会快速建立较大的蠕行扭矩,从而防止进一步溜坡;
3、可见,在上述方案中,汽车在斜坡起步过程中,仍然会存在溜坡的问题。
技术实现思路
1、本技术的目的是针对以上问题,提供一种汽车蠕行起步控制方法及系统,
2、第一方面,本技术提供一种汽车蠕行起步控制方法,所述方法包括:
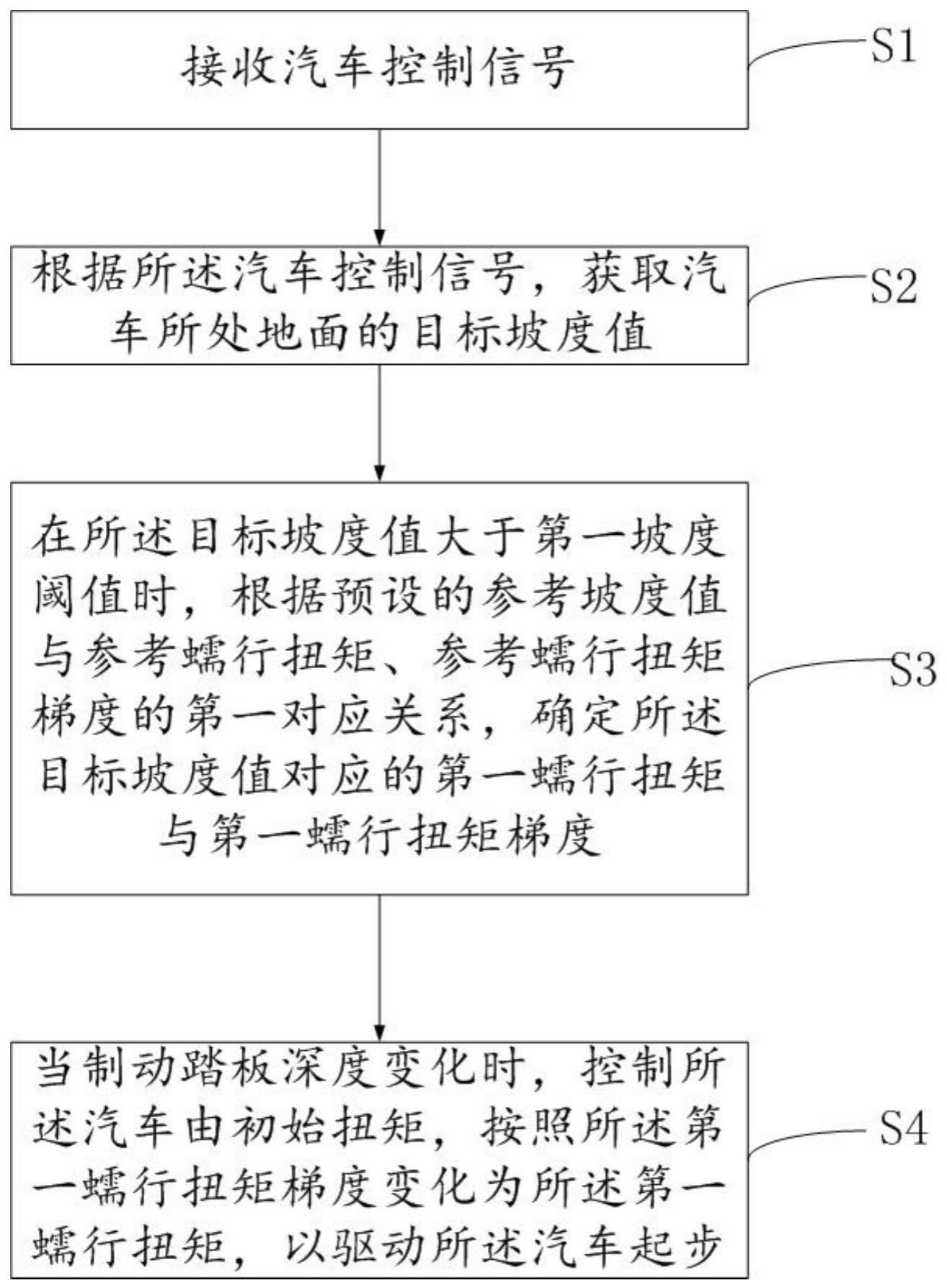
3、接收汽车控制信号;
4、根据所述汽车控制信号,获取汽车所处地面的目标坡度值;
5、在所述目标坡度值大于第一坡度阈值时,根据预设的参考坡度值与参考蠕行扭矩、参考蠕行扭矩梯度的第一对应关系,确定所述目标坡度值对应的第一蠕行扭矩与第一蠕行扭矩梯度;
6、当制动踏板深度变化时,控制所述汽车由初始扭矩,按照所述第一蠕行扭矩梯度变化为所述第一蠕行扭矩,以驱动所述汽车起步。
7、根据本技术实施例提供的技术方案,所述方法还包括:
8、根据预设的参考坡度值与原始蠕行扭矩、原始蠕行扭矩梯度的第二对应关系,确定所述目标坡度值对应的第二蠕行扭矩与第二蠕行扭矩梯度;
9、基于所述第一蠕行扭矩与所述第二蠕行扭矩,确定第三蠕行扭矩;基于所述第一蠕行扭矩梯度与所述第二蠕行扭矩梯度,确定第三蠕行扭矩梯度;
10、所述按照所述第一蠕行扭矩梯度变化为所述第一蠕行扭矩,包括:
11、按照所述第三蠕行扭矩梯度变化为所述第三蠕行扭矩。
12、根据本技术实施例提供的技术方案,所述基于所述第一蠕行扭矩与所述第二蠕行扭矩,确定第三蠕行扭矩,包括:
13、比对所述第一蠕行扭矩与所述第二蠕行扭矩的大小,得到第一比对结果;
14、根据所述第一比对结果,将所述第一蠕行扭矩与所述第二蠕行扭矩中的最大值,确定为第三蠕行扭矩。
15、根据本技术实施例提供的技术方案,所述步骤中具体包括:
16、所述基于所述第一蠕行扭矩梯度与所述第二蠕行扭矩梯度,确定所述第三蠕行扭矩,包括:
17、比对所述第一蠕行扭矩梯度与所述第二蠕行扭矩梯度的大小,得到第二比对结果;
18、根据所述第二比对结果,将所述第一蠕行扭矩梯度与所述第二蠕行扭矩梯度之间的最大值,确定为第三蠕行扭矩梯度。
19、根据本技术实施例提供的技术方案,在所述车辆起步之后,所述方法还包括:
20、获取所述汽车的实时速度;
21、比对所述第一蠕行扭矩与所述第二蠕行扭矩的大小,得到第三比对结果;
22、根据所述第三比对结果,将所述第一蠕行扭矩与所述第二蠕行扭矩中的最小值,确定为第四蠕行扭矩;
23、当所述实时速度大于第一速度阈值时,按照所述第三蠕行扭矩梯度变化为所述第四蠕行扭矩。
24、根据本技术实施例提供的技术方案,在所述车辆起步之后,所述方法还包括:
25、获取所述汽车的实时扭矩,并计算所述实时扭矩与所述第三蠕行扭矩之间的第一扭矩差值;
26、比对所述第一蠕行扭矩梯度与所述第二蠕行扭矩梯度的大小,得到第四比对结果;
27、根据所述第四比对结果,将所述第一蠕行扭矩梯度与所述第二蠕行扭矩梯度之间的最小值,确定为第四蠕行扭矩梯度;
28、当所述第一扭矩差值小于第一扭矩阈值时,所述第三蠕行扭矩梯度变化为所述第四蠕行扭矩梯度。
29、根据本技术实施例提供的技术方案,确定所述参考坡度值对应的参考蠕行扭矩确定方式为:
30、将所述汽车置于坡度为所述参考坡度的地面上,并获取所述汽车的第一参数,所述第一参数包括有所述汽车的质量、所述汽车处于静止状态下的加速度值、制动压力数值、所述汽车的受到的摩擦力、重力加速度以及所述汽车的滚动半径;
31、根据所述第一参数,确定所述汽车置于所述参考坡度的地面上所对应参考蠕行扭矩。
32、根据本技术实施例提供的技术方案,所述确定所述参考坡度值对应的参考蠕行扭矩梯度的确定方式为:
33、将所述汽车置于坡度为所述参考坡度的地面上,并获取汽车的第二参数,所述第二参数包括有所述汽车的质量、所述汽车期望的加速度变化率以及所述汽车的滚动半径;
34、根据所述第二参数,确定所述汽车置于所述参考坡度的地面上所对应的参考蠕行扭矩梯度。
35、根据本技术实施例提供的技术方案,所述方法还包括:
36、当所述目标坡度值小于或者等于所述第一坡度阈值时,根据预设的参考坡度值与原始蠕行扭矩、原始蠕行扭矩梯度的第二对应关系,确定所述目标坡度值对应的第二蠕行扭矩与第二蠕行扭矩梯度;
37、按照所述第一蠕行扭矩梯度变化为所述第一蠕行扭矩,包括:
38、按照所述第二蠕行扭矩梯度变化为第二蠕行扭矩。
39、第二方面,本技术还提供一种汽车蠕行起步控制系统,包括:
40、第一接收模块,所述第一接收模块配置用于接收汽车控制信号;
41、第一获取模块,所述第一获取模块配置用于根据所述汽车控制信号,获取汽车所处地面的目标坡度值;
42、第一确定模块,所述第一确定模块配置用于在所述目标坡度值大于第一坡度阈值时,根据预设的参考坡度值与参考蠕行扭矩、参考蠕行扭矩梯度的第一对应关系,确定所述目标坡度值对应的第一蠕行扭矩与第一蠕行扭矩梯度;
43、第一控制模块,所述第一控制模块配置用于当制动踏板深度变化时,控制所述汽车由初始扭矩,按照所述第一蠕行扭矩梯度变化为所述第一蠕行扭矩,以驱动所述汽车起步。
44、根据本技术实施例提供的技术方案,所述控制系统还包括:
45、所述第一确定模块配置还用于根据预设的参考坡度值与原始蠕行扭矩、原始蠕行扭矩梯度的第二对应关系,确定所述目标坡度值对应的第二蠕行扭矩与第二蠕行扭矩梯度;
46、所述第一确定模块配置还用于基于所述第一蠕行扭矩与所述第二蠕行扭矩,确定第三蠕行扭矩;基于所述第一蠕行扭矩梯度与所述第二蠕行扭矩梯度,确定第三蠕行扭矩梯度;
47、所述第一控制模块配置还用于所述按照所述第一蠕行扭矩梯度变化为所述第一蠕行扭矩,包括:
48、按照所述第三蠕行扭矩梯度变化为所述第三蠕行扭矩。
49、根据本技术实施例提供的技术方案,所述控制系统还包括:
50、所述基于所述第一蠕行扭矩与所述第二蠕行扭矩,确定第三蠕行扭矩,包括:
51、第一比对模块配置用于比对所述第一蠕行扭矩与所述第二蠕行扭矩的大小,得到第一比对结果;
52、所述第一确定模块配置还用于根据所述第一比对结果,将所述第一蠕行扭矩与所述第二蠕行扭矩中的最大值,确定为第三蠕行扭矩。
53、根据本技术实施例提供的技术方案,所述控制系统还包括:
54、所述基于所述第一蠕行扭矩梯度与所述第二蠕行扭矩梯度,确定所述第三蠕行扭矩,包括:
55、所述第一比对模块配置还用于比对所述第一蠕行扭矩梯度与所述第二蠕行扭矩梯度的大小,得到第二比对结果;
56、所述第一确定模块配置还用于根据所述第二比对结果,将所述第一蠕行扭矩梯度与所述第二蠕行扭矩梯度之间的最大值,确定为第三蠕行扭矩梯度。
57、根据本技术实施例提供的技术方案,所述控制系统还包括:
58、所述第一获取模块配置还用于获取所述汽车的实时速度;
59、所述第一比对模块配置还用于比对所述第一蠕行扭矩与所述第二蠕行扭矩的大小,得到第三比对结果;
60、所述第一确定模块配置还用于根据所述第三比对结果,将所述第一蠕行扭矩与所述第二蠕行扭矩中的最小值,确定为第四蠕行扭矩;
61、所述第一确定模块配置还用于当所述实时速度大于第一速度阈值时,按照所述第三蠕行扭矩梯度变化为所述第四蠕行扭矩。
62、根据本技术实施例提供的技术方案,所述控制系统还包括:
63、第一计算模块配置用于获取所述汽车的实时扭矩,并计算所述实时扭矩与所述第三蠕行扭矩之间的第一扭矩差值;
64、所述第一比对模块配置还用于比对所述第一蠕行扭矩梯度与所述第二蠕行扭矩梯度的大小,得到第四比对结果;
65、所述第一确定模块配置还用于根据所述第四比对结果,将所述第一蠕行扭矩梯度与所述第二蠕行扭矩梯度之间的最小值,确定为第四蠕行扭矩梯度;
66、所述第一确定模块配置还用于当所述第一扭矩差值小于第一扭矩阈值时,所述第三蠕行扭矩梯度变化为所述第四蠕行扭矩梯度。
67、根据本技术实施例提供的技术方案,所述控制系统还包括:
68、确定所述参考坡度值对应的参考蠕行扭矩确定方式为:
69、所述第一获取模块配置还用于将所述汽车置于坡度为所述参考坡度的地面上,并获取所述汽车的第一参数,所述第一参数包括有所述汽车的质量、所述汽车处于静止状态下的加速度值、制动压力数值、所述汽车受到的摩擦力、重力加速度以及所述汽车的滚动半径;
70、所述第一计算模块配置还用于根据所述第一参数,确定所述汽车置于所述参考坡度的地面上所对应参考蠕行扭矩。
71、根据本技术实施例提供的技术方案,所述控制系统还包括:
72、所述确定所述参考坡度值对应的参考蠕行扭矩梯度的确定方式为:
73、所述第一获取模块配置还用于将所述汽车置于坡度为所述参考坡度的地面上,并获取汽车的第二参数,所述第二参数包括有所述汽车的质量、所述汽车期望的加速度变化率以及所述汽车的滚动半径;
74、所述第一计算模块配置还用于根据所述第二参数,确定所述汽车置于所述参考坡度的地面上所对应的参考蠕行扭矩梯度。
75、根据本技术实施例提供的技术方案,所述控制系统还包括:
76、所述第一确定模块配置还用于当所述目标坡度值小于或者等于所述第一坡度阈值时,根据预设的参考坡度值与原始蠕行扭矩、原始蠕行扭矩梯度的第二对应关系,确定所述目标坡度值对应的第二蠕行扭矩与第二蠕行扭矩梯度;
77、按照所述第一蠕行扭矩梯度变化为所述第一蠕行扭矩,包括:
78、所述第一确定模块配置还用于按照所述第二蠕行扭矩梯度变化为第二蠕行扭矩。
79、第三方面,本技术提供一种终端设备,所述终端设备包括:存储器、处理器及存储在所述存储器上并可在所述处理器上运行的计算机程序;
80、所述计算机程序被所述处理器执行时实现如上任一项所述的汽车蠕行起步控制方法的步骤。
81、第四方面,本技术提供一种计算机可读存储介质,所述计算机可读存储介质上存储有汽车蠕行起步控制程序,所述汽车蠕行起步控制程序被处理器执行时实现如上任一项所述的汽车蠕行起步控制方法的步骤。
82、与现有技术相比,本技术的有益效果:本技术首先要接收到汽车的控制信号,根据汽车控制信号,来获取汽车所处地面的目标坡度值,当目标坡度值大于第一坡度阈值的时候,根据预设的参考坡度值、参考蠕行扭矩与参考蠕行扭矩梯度之间的对应关系,确定目标坡度值所对应的第一蠕行扭矩与第一蠕行扭矩梯度,当制动踏板的深度发生变化时,控制汽车由初始扭矩,按照第一蠕行扭矩梯度变化至第一蠕行扭矩,并以第一蠕行扭矩驱动汽车起步;
83、在使用过程中,要接收到汽车的控制信号,并根据所接收到的信号,获取汽车所处地面的目标坡度值,当目标坡度值大于第一坡度阈值的时候,确定目标坡度值所对应的第一蠕行扭矩与第一蠕行扭矩梯度,当制动踏板的深度发生变化时,控制汽车由初始扭矩按照第一蠕行扭矩梯度变化为第一蠕行扭矩,并以第一蠕行扭矩驱动汽车起步;
84、通过本技术的方案,能够实现在获取到目标坡度值的情况下,直接获取到与目标坡度值相对应的第一蠕行扭矩和第一蠕行扭矩梯度,从而当制动踏板的深度发生变化时,可以直接控制汽车的初始扭矩按照第一蠕行扭矩梯度变化至第一蠕行扭矩,与现有技术相比,无需在汽车起步以后才开始计算汽车所需的扭矩,能够直接根据获取到的第一蠕行扭矩与第一蠕行扭矩梯度,快速为汽车建立实际扭矩,控制汽车进行起步,从而使得汽车得以平稳的行驶,不会出现溜坡的情况。
- 还没有人留言评论。精彩留言会获得点赞!