速度规划方法、装置、设备和存储介质与流程
本技术涉及自动驾驶控制领域,特别是涉及一种速度规划方法、装置、设备和存储介质。
背景技术:
1、速度规划是自动驾驶控制领域中重要一环,规划得到的速度规划曲线(如a-t曲线、v-t曲线)用于控制车辆纵向行驶。
2、通常情况下,速度规划耗时越低且规划出的速度规划曲线越平滑,越符合速度规划的要求。其中,若速度规划曲线不平滑(如加速度、速度存在突变),会影响车辆行驶的安全性和舒适性;若速度规划耗时较高,将不利于车辆的纵向准确控制,甚至会导致交通事故的发生。
3、因此,如何在速度规划的过程中同时兼顾速度规划的耗时和速度规划曲线的平滑性,成为亟待解决的技术问题。
技术实现思路
1、本技术主要解决的技术问题是提供一种速度规划方法、装置、设备和计算机可读存储介质,能够在耗时较低的情况下生成较为平滑的速度规划曲线,提高了速度规划的效果。
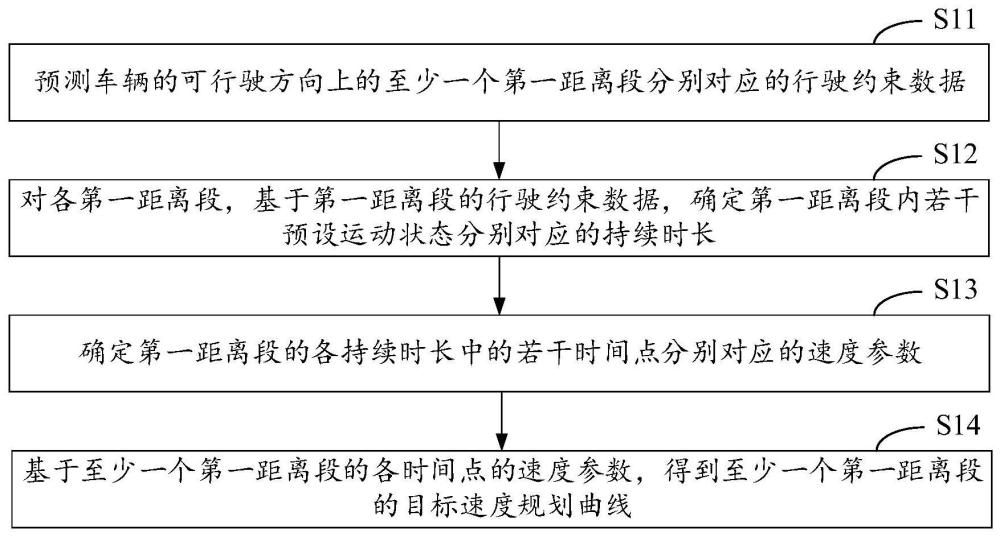
2、为解决上述技术问题,本技术采用的一个技术方案是:提供一种速度规划方法,该方法包括:预测车辆的可行驶方向上的至少一个第一距离段分别对应的行驶约束数据;对各第一距离段,基于第一距离段的行驶约束数据,确定第一距离段内若干预设运动状态分别对应的持续时长;确定第一距离段的各持续时长中的若干时间点分别对应的速度参数;基于至少一个第一距离段的各时间点的速度参数,得到至少一个第一距离段的目标速度规划曲线,目标速度规划曲线为速度参数随时间变化的曲线。
3、可选地,行驶约束数据包括起止点约束参数、最大目标速度、加速过程的第一最大加速度参数和减速过程的第二最大加速度参数中的至少一个,其中,起止点约束参数包括起始加速度、起始速度、起始距离、终止加速度、终止速度和终止距离,第一最大加速度参数包括第一最大加速度和第一最大加速度变化率,第二最大加速度参数包括第二最大加速度和第二最大加速度变化率;若干预设运动状态包括加加速状态、匀加速状态、减加速状态、匀速状态、减减速状态、匀减速状态和加减速状态中的至少一个。
4、可选地,基于第一距离段的行驶约束数据,确定第一距离段内若干预设运动状态分别对应的持续时长,包括:基于第一距离段的行驶约束数据,执行第一判断操作得到第一判断结果,以及执行第二判断操作得到第二判断结果,其中,第一判断操作包括:判断车辆在第一距离段内是否能够达到第一距离段的最大目标速度,第二判断操作包括:判断车辆在第一距离段内是否能够达到第一距离段的第一最大加速度或第二最大加速度;基于第一判断结果和第二判断结果,确定第一距离段的各预设运动状态的持续时长。
5、可选地,基于第一判断结果和第二判断结果,确定第一距离段的各预设运动状态的持续时长,包括:响应于第一判断结果和第二判断结果中至少一个判断结果为是,从预设映射关系中选择与第一判断结果和第二判断结果相对应的目标计算方式,并基于目标计算方式确定第一距离段的各个预设运动状态的持续时长;响应于第一判断结果和第二判断结果均为否,调整第一距离段的最大目标速度,并重新执行基于第一距离段的行驶约束数据,执行第一判断操作得到第一判断结果,以及执行第二判断操作得到第二判断结果及后续步骤。
6、可选地,调整第一距离段的行驶约束数据中的最大目标速度,包括:将第一距离段的最大目标速度调整为第一距离段的起始速度和终止速度中的较大值。
7、可选地,基于第一距离段的行驶约束数据,执行第一判断操作得到第一判断结果的步骤包括:基于第一距离段的行驶约束数据,确定车辆在第一距离段行驶时,在达到最大目标加速度的前提下以目标运动状态行驶所对应的最大参考速度、达到最大目标速度和最大目标加速度的前提下加速过程和减速过程的第一行驶距离、未达到最大目标加速度且达到最大目标速度的前提下加速过程和减速过程的第二行驶距离、未达到最大目标加速度且达到最大目标速度的前提下达到实际最大加速度所需的第一时长、以及达到最大目标加速度所需的第二时长;其中,在最大目标加速度为第一最大加速度的情形下,目标运动状态包括加加速度状态和减加速状态;在最大目标加速度为第二最大加速度的情形下,目标运动状态包括减减速状态和加减速状态;响应于符合预设条件中的至少一者,确定第一判断结果为是;响应于不符合预设条件中的任一者,确定第一判断结果为否;其中,预设条件包括:第一距离段的最大目标速度大于或等于最大参考速度,且第一距离段的起止距离大于或等于第一行驶距离;第一距离段的第一时长小于第二时长,且第一距离段的起止距离大于或等于第二行驶距离。
8、可选地,确定最大参考速度、第一行驶距离、第二行驶距离、第一时长和第二时长,包括:基于第一距离段的目标起止速度、最大目标加速度和最大目标加速度变化率,确定最大参考速度;其中,在目标起止速度为起始速度的情形下,最大目标加速度为第一最大加速度,最大目标加速度变化率为第一最大加速度变化率;在目标起止速度为终止速度的情形下,最大目标加速度为第二最大加速度,最大目标加速度变化率为第二最大加速度变化率;基于第一距离段的起始速度、终止速度、最大目标速度、第一最大加速度、第一最大加速度变化率、第二最大加速度和第二最大加速度变化率,确定第一行驶距离;基于第一距离段的起始速度、终止速度、最大目标速度、第一最大加速度变化率和第二最大加速度变化率,确定第二行驶距离;基于第一距离段的目标起止速度、最大目标速度和最大目标加速度变化率,确定第一时长;基于第一距离段的最大目标加速度和最大目标加速度变化率,确定第二时长。
9、可选地,基于第一距离段的行驶约束数据,执行第二判断操作得到第二判断结果的步骤包括:基于第一距离段的行驶约束数据,确定车辆在第一距离段行驶时,在达到最大目标加速度的前提下以目标运动状态行驶所对应的最大速度变化量;其中,在最大目标加速度为第一最大加速度的情形下,目标运动状态包括加加速度状态和减加速状态;在最大目标加速度为第二最大加速度的情形下,目标运动状态包括减减速状态和加减速状态;确定第一距离段的起始速度和终止速度的差值绝对值;响应于差值绝对值大于最大速度变化量,确定第二判断结果为是;响应于差值绝对值小于或等于最大速度变化量,确定第二判断结果为否。
10、可选地,在基于第一距离段的行驶约束数据,确定第一距离段内若干预设运动状态分别对应的持续时长之前,方法还包括:基于第一距离段的行驶约束数据,确定第一距离段的最小规划距离;判断第一距离段的起止距离是否小于第一距离段的最小规划距离;响应于第一距离段的起止距离小于第一距离段的最小规划距离,调整第一距离段的行驶约束数据中起始距离、终止距离、第一最大加速度、第一最大加速度变化率、第二最大加速度和第二最大加速度变化率中的至少一者,并重新执行基于第一距离段的行驶约束数据,确定第一距离段的最小规划距离及其后续步骤,直至最新的第一距离段的起止距离大于或等于最新的第一距离段的最小规划距离为止。
11、可选地,基于第一距离段的行驶约束数据,确定第一距离段的最小规划距离,包括:响应于车辆在第一距离段能够达到最大目标加速度,基于第一距离段的起始速度、终止速度、最大目标加速度、最大目标加速度变化率,确定最小规划距离;响应于车辆在第一距离段内不能达到最大目标加速度,基于第一距离段的起始速度、终止速度和最大目标加速度变化率,确定最小规划距离;其中,在最大目标加速度为第一最大加速度的情形下,最大目标加速度变化率为第一最大加速度变化率;在最大目标加速度为第二最大加速度情形下,最大目标加速度变化率为第二最大加速度变化率。
12、可选地,预测车辆的可行驶方向上的至少一个第一距离段分别对应的行驶约束数据,包括:预测车辆的可行驶方向上的限速信息,其中,限速信息包括道路限速、减速带限速、障碍物交互限速以及道路曲率限速中的至少一者;基于车辆的限速信息,得到至少一个第二距离段分别对应的第一初始速度曲线,其中,第一初始速度曲线中各距离点的速度值为相应距离下各限速信息中的最小限速;分别对各第二距离段的第一初始速度曲线进行阶梯式分段处理,以得到至少一个第一距离段分别对应的速度段;基于至少一个第一距离段分别对应的速度段,得到各第一距离段分别对应的行驶约束数据。
13、可选地,分别对各第二距离段的第一初始速度曲线进行阶梯式分段处理,以得到至少一个第一距离段分别对应的速度段,包括:按照预设速度间隔分别对各第二距离段的第一初始速度曲线进行划分,得到至少一个第一距离段分别对应的第二初始速度曲线;对于各第一距离段,将第一距离段的第二初始速度曲线中的速度均处理为第一距离段的起始速度,以得到第一距离段的速度段。
14、可选地,基于至少一个第一距离段分别对应的速度段,得到各第一距离段分别对应的行驶约束数据,包括:确定至少一个第一距离段的速度段上的若干目标点,其中,若干目标点包括各速度段上的起点以及与车辆距离最远的速度段上的终点;将与车辆距离最近的目标点作为初始遍历点,将目标点对应的第一距离段作为初始距离段,以及,将初始遍历点的加速度、速度和距离分别作为初始距离段的起始加速度、起始速度和起始距离,将初始距离段的终止加速度设为预设加速度值,将初始遍历点的下一个目标点的速度和距离分别作为初始距离段的终止速度和终止距离,将初始距离段的起始速度和终止速度中的较大值作为初始距离段的最大目标速度,基于初始距离段的最大目标速度与起始速度之间的第一速度差值、初始距离段的最大目标速度与终止速度之间的第二速度差值以及初始距离段的起止距离中的至少一者,确定初始距离段的第一最大加速度参数和第二最大加速度参数;将初始遍历点的下一个目标点作为新初始遍历点,将初始距离段的下一个第一距离段作为新初始距离段,以及,将新初始距离段的起始加速度和终止加速度均设为预设加速度值,将新初始遍历点的速度和距离分别作为新初始距离段的起始速度和起始距离,将新初始遍历点的速度与新初始遍历点的下一个目标点的速度中的较小值作为新初始距离段的终止速度,将新初始遍历点的下一个目标点的距离作为新初始距离段的终止距离,将新初始遍历点的速度作为新初始距离段的最大目标速度;基于新初始距离段的最大目标速度与起始速度之间的第一速度差值、新初始距离段的最大目标速度与终止速度之间的第二速度差值以及新初始距离段的起止距离中的至少一者,确定新初始距离段的第一最大加速度参数和第二最大加速度参数;将新初始遍历点的下一个目标点作为目标遍历点,将新初始距离段的下一个第一距离段作为目标距离段,以及,将目标距离段的起始加速度和终止加速度均设为预设加速度值,将目标遍历点的速度与目标遍历点的上一个目标点的速度中的较小值作为目标距离段的起始速度,将目标遍历点的速度与目标遍历点的下一个目标点的速度中的较小值作为目标距离段的终止速度,将目标遍历点的距离和目标遍历点的下一个目标点的距离分别作为目标距离段的起始距离和终止距离,将目标遍历点的速度作为目标距离段的最大目标速度;基于目标距离段的最大目标速度与起始速度之间的第一速度差值、目标距离段的最大目标速度与终止速度之间的第二速度差值以及目标距离段的起止距离中的至少一者,确定目标距离段的第一最大加速度参数和第二最大加速度参数;将目标遍历点的下一个目标点作为新的目标遍历点,将目标距离段的下一个第一距离段作为新的目标距离段,重新执行将目标距离段的起始加速度和终止加速度均设为预设加速度值及其后续步骤,直至最新的目标遍历点为终点。
15、为解决上述技术问题,本技术采用的另一个技术方案是:提供一种速度规划装置,该装置包括:预测模块,用于预测车辆的可行驶方向上的至少一个第一距离段分别对应的行驶约束数据;时间确定模块,用于对各第一距离段,基于第一距离段的行驶约束数据,确定第一距离段内若干预设运动状态分别对应的持续时长;速度参数确定模块,用于确定第一距离段的各持续时长中的若干时间点分别对应的速度参数;获取模块,用于基于至少一个第一距离段的各时间点的速度参数,得到至少一个第一距离段的目标速度规划曲线,目标速度规划曲线为速度参数随时间变化的曲线。
16、为解决上述技术问题,本技术采用的另一个技术方案是:提供一种电子设备,包括相互耦接的存储器和处理器,存储器存储有程序指令;处理器用于执行存储器中存储的程序指令,以实现上述速度规划方法。
17、为解决上述技术问题,本技术采用的另一个技术方案是:提供一种计算机可读存储介质,该计算机可读存储介质用于存储程序指令,程序指令能够被处理器执行以实现上述速度规划方法。
18、以上方案,通过预测车辆的可行驶方向上的至少一个第一距离段分别对应的行驶约束数据;并且,对各第一距离段,基于第一距离段的行驶约束数据,确定第一距离段内若干预设运动状态分别对应的持续时长;确定第一距离段的各持续时长中的若干时间点分别对应的速度参数,并基于至少一个第一距离段的各时间点的速度参数,得到至少一个第一距离段的目标速度规划曲线。通过该方式,仅需基于各第一距离段的行驶约束数据,确定各第一距离段内若干预设运动状态分别对应的持续时长,即可快速得到至少一个第一距离段的目标速度规划曲线,速度规划过程中不涉及复杂运算,能够在耗时较低的情况下生成较为平滑的速度规划曲线,提高了速度规划的效果。
- 还没有人留言评论。精彩留言会获得点赞!