一种双驱控制方法、系统及回填压实机与流程
本发明涉及回填压实机,具体涉及一种双驱控制方法、系统及回填压实机。
背景技术:
1、回填压实机的主要用于垃圾填埋场、道路基础、水利大坝、机场等大型基础填方工程的推铲和压实工作,施工环境差,特别是在垃圾回填作业过程中,单泵双马达控制系统脱困能力差,无法满足施工环境,而双驱控制回填压实机能够提供更大的驱动能力和更强的防打滑能力,但是该系统存在另外一个问题:独立的前后驱动系统,必须通过控制方法保证前后驱动行走速度一致,当前后轮速度不一致时,就会影响了回填压实机行驶系统的工作效率,并且对行走液压系统本身带来内耗。
技术实现思路
1、本发明的目的在于提供一种双驱控制方法、系统及回填压实机,以解决现有技术中独立的前后驱系统中前后轮速度不一致导致的液压系统内耗、作业机械工作效率低的问题。
2、为达到上述目的,本发明是采用下述技术方案实现的:
3、第一方面,公开了一种双驱控制方法,应用于具有独立的前后驱动系统的作业机械,包括:
4、获取前轮压力pfront、后轮压力prear、前轮速度vfront和后轮速度vrear;
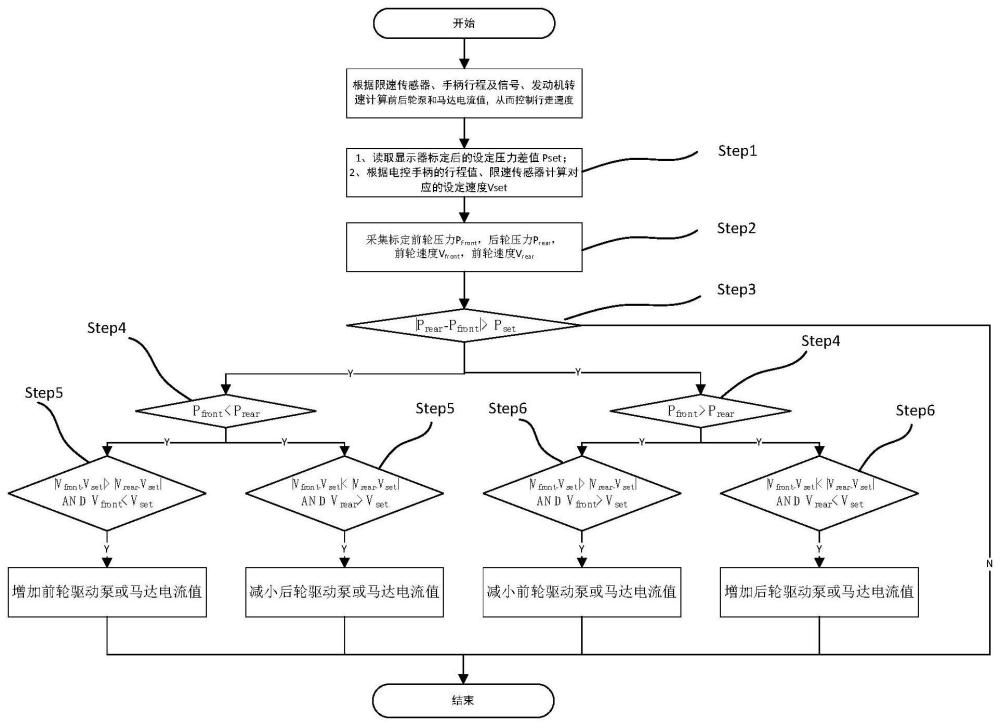
5、响应于前轮压力pfront与后轮压力prear之差的绝对值高于设定压力差值pset时,调整前轮泵比例阀或前轮马达比例阀的电流值或调整后轮泵比例阀或后轮马达比例阀的电流值,直至前轮速度vfront与后轮速度vrear同步。
6、进一步地,所述响应于前轮压力pfront和后轮压力prear之差的绝对值高于设定压力差值pset时,调整前轮泵或前轮马达的电流值或调整后轮泵或后轮马达的电流值包括:
7、当前轮压力pfront和后轮压力prear之差的绝对值高于设定压力差值pset时,判断前轮压力pfront与后轮压力prear的关系、前轮速度vfront和目标速度vset之差的绝对值vfs与后轮速度vrear和目标速度vset之差的绝对值vrs的关系以及前轮速度vfront、后轮速度vrear与目标速度vset的关系;
8、若pfront<prear、vfs>vrs且vfront<vset时,增加前轮泵比例阀或前轮马达比例阀的电流值;若pfront<prear、vfs<vrs且vrear>vset时,减小后轮泵比例阀或后轮马达比例阀的电流值;
9、若pfront>prear、vfs>vrs且vfront>vset时,减小前轮泵比例阀或前轮马达比例阀的电流值,若pfront>prear、vfs<vrs且vrear<vset时,增加后轮泵比例阀或后轮马达比例阀的电流值。
10、进一步地,所述目标速度vset是根据电控手柄的行程值和限速传感器计算获得,计算公式为:
11、vset=vmax×t×l;
12、其中,vmax为设定行驶最大速度,t为电控手柄的行程值,取值为0~100%,l为限速传感器的计算值,取值为0~100%。
13、进一步地,获取前轮压力pfront、后轮压力prear、前轮速度vfront和后轮速度vrear包括:
14、通过速度传感器实时采集前轮速度和后轮速度,根据速度传感器的标定公式标定速度传感器的采集值,获得前轮速度vfront和后轮速度vrear;所述速度传感器的标定公式为:
15、
16、其中,n为速度传感器的采集值,d为车轮直径,i为车轮减速比,m为车轮齿数;
17、通过压力传感器实时采集前轮压力和后轮压力,根据压力传感器的标定公式标定输出电压,获得前轮压力pfront和后轮压力prear,所述压力传感器的标定公式为:
18、
19、其中,输出电压vout的取值范围为0.5~4.5v,vmin为输出电压最小值,vmax为输出电压最大值,pmax为输出电压最大值对应的压力最大值。
20、第二方面,本技术公开了一种双驱控制系统,应用于具有独立的前后驱动系统的作业机械,包括:
21、信号采集模块,用于获取前轮压力pfront、后轮压力prear、前轮速度vfront和后轮速度vrear;
22、处理模块,响应于前轮压力pfront与后轮压力prear之差的绝对值高于设定压力差值pset时,调整前轮泵比例阀或前轮马达比例阀的电流值或调整后轮泵比例阀或后轮马达比例阀的电流值,直至前轮速度vfront与后轮速度vrear同步。
23、进一步地,所述信号处理模块用于当前轮压力pfront和后轮压力prear之差的绝对值高于设定压力差值pset时,判断前轮压力pfront与后轮压力prear的关系、前轮速度vfront和目标速度vset之差的绝对值vfs与后轮速度vrear和目标速度vset之差的绝对值vrs的关系以及前轮速度vfront、后轮速度vrear与目标速度vset的关系;
24、若pfront<prear、vfs>vrs且vfront<vset时,增加前轮泵比例阀或前轮马达比例阀的电流值;若pfront<prear、vfs<vrs且vrear>vset时,减小后轮泵比例阀或后轮马达比例阀的电流值;
25、若pfront>prear、vfs>vrs且vfront>vset时,减小前轮泵比例阀或前轮马达比例阀的电流值,若pfront>prear、vfs<vrs且vrear<vset时,增加后轮泵比例阀或后轮马达比例阀的电流值。
26、进一步地,所述信号采集模块包括用于实时采集前轮速度vfront的前轮速度传感器、用于实时采集后轮速度vrear的后轮速度传感器、用于实时采集前轮压力pfront的前轮压力传感器以及用于实时采集轮压力prear的后轮压力传感器。
27、进一步地,所述处理模块为和采集模块信号连接的主控制器;
28、所述主控制器上信号连接有用于进行数据显示和标定的显示器、用于控制作业机械动作的电控手柄以及用于限制作业机械车速的限速传感器。
29、第三方面,公开了一种回填压实机,包括第二方面任一项所述双驱控制系统。
30、第四方面,公开了一种计算机可读存储介质,其上存储有计算机程序,该计算机程序被处理器执行时,实现如第一方面任一所述的方法。
31、根据上述技术方案,本发明的有益效果为:
32、本技术的双驱控制方法,在前轮压力与后轮压力之差的绝对值高于设定压力差值时,调整前轮泵比例阀或前轮马达比例阀的电流值或调整后轮泵比例阀或后轮马达比例阀的电流值,直至前轮速度与后轮速度同步,有效的保证了工作时前后轮速度的同步,使作业机械能够在恶劣环境下平稳行走,降低液压系统的内耗,提高了作业机械的工作效率;
33、本技术通过判断前轮压力与后轮压力,根据结果进行比例阀电流调整从而达到前后液压驱动系统的速度保持一致,从而杜绝前驱系统被后驱系统或后驱系统被前驱系统拖动状态,提高了回填压实机行驶系统的工作效率。
- 还没有人留言评论。精彩留言会获得点赞!