基于SOA架构的车辆主动悬架控制系统和存储介质的制作方法
本技术涉及车联网,特别是涉及一种基于soa架构的车辆主动悬架控制系统、基于soa架构的车辆主动悬架控制系统的控制方法、计算机设备和存储介质。
背景技术:
1、现在的车辆主动悬架系统主要由空气弹簧设备和连续减振控制设备组成,空气弹簧设备主要通过充放气状态实现车辆主动悬架高度的升降,连续减振控制设备则通过控制电磁阀开度大小从而控制阻尼液体流速来实现车辆主动悬架阻尼的变化。
2、然而,传统的车辆悬架系统中空气弹簧设备和连续减振控制设备通常相互独立运行,存在信号重复调用和运行效率较低等问题。
技术实现思路
1、基于此,有必要针对上述技术问题,提供一种能够避免信号重复调用和提高运行效率的基于soa架构的车辆主动悬架控制系统、基于soa架构的车辆主动悬架控制系统的控制方法、计算机设备和存储介质。
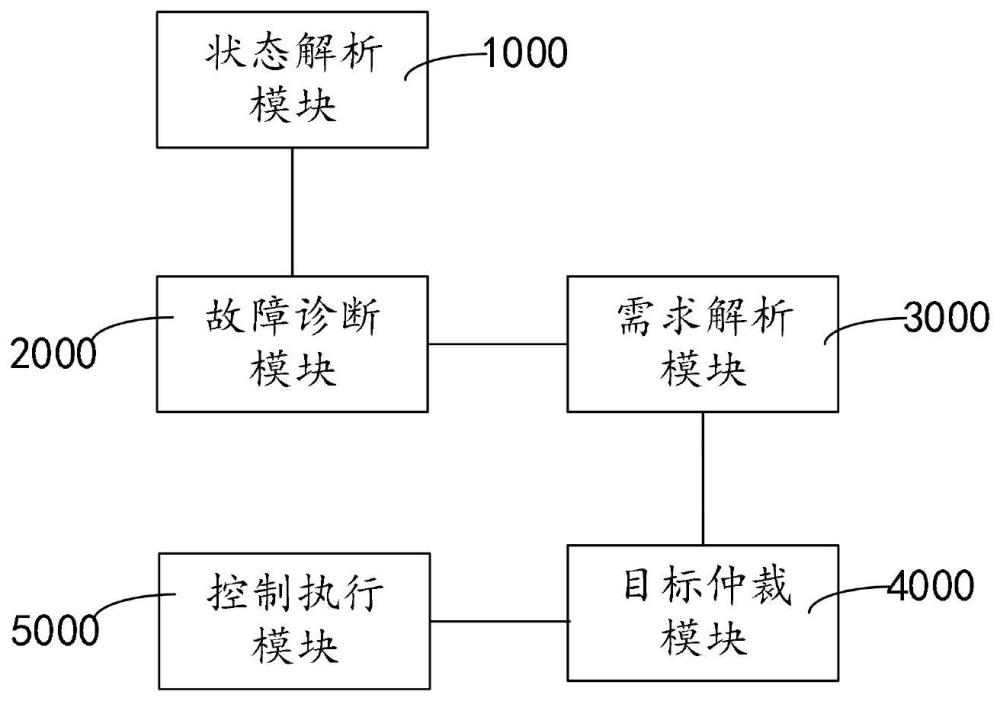
2、第一方面,提供了一种基于soa架构的车辆主动悬架控制系统,上述述车辆主动悬架控制系统包括状态解析模块、故障诊断模块、需求解析模块、目标仲裁模块和控制执行模块。
3、状态解析模块,用于获取车辆设备的设备工作数据,还用于对设备工作数据进行车辆状态识别后得到状态识别结果;
4、故障诊断模块,用于获取车辆设备的故障监测数据,还用于对故障监测数据进行故障诊断后得到故障诊断结果;其中,故障诊断结果包括车辆部件故障诊断结果;车辆部件故障诊断结果包括空气弹簧设备的故障诊断结果和连续减振控制设备的故障诊断结果;
5、需求解析模块,用于获取当前车辆模式和当前车辆速度,还用于根据当前车辆模式、当前车辆速度和状态识别结果进行数据解析后得到数据解析结果;其中,数据解析结果包括空气弹簧设备的需求高度和连续减振控制设备的需求主动阻尼;
6、目标仲裁模块,用于根据需求高度、状态识别结果和空气弹簧设备的故障诊断结果进行高度仲裁和逐级调节后得到空气弹簧设备的目标高度,还用于根据需求主动阻尼、状态识别结果和连续减振控制设备的故障诊断结果进行阻尼仲裁和逐级调节后得到连续减振控制设备的目标阻尼;
7、控制执行模块,用于根据目标高度对空气弹簧设备的阀泵进行控制,还用于根据目标阻尼对连续减振控制设备的电磁阀进行控制。
8、在其中一个实施例中,状态解析模块包括车辆运动状态解析单元;
9、车辆运动状态解析单元用于获取当前车辆速度、当前车辆档位、车辆速度保持时间、车辆侧向加速度、车辆横摆加速度、车辆纵向加速度、车辆加速踏板开度信息、车辆制度踏板开度信息、悬架高度变化率信息、车辆主动悬架主回路的内部压力、空气弹簧设备的内部压力、空气弹簧设备的实际高度和空气弹簧设备的高度变化率;其中,设备工作数据包括当前车辆速度、当前车辆档位、车辆速度保持时间、车辆侧向加速度、车辆横摆加速度、车辆纵向加速度、车辆加速踏板开度信息、车辆制度踏板开度信息、悬架高度变化率信息、车辆主动悬架主回路的内部压力、空气弹簧设备的内部压力、空气弹簧设备的实际高度和空气弹簧设备的高度变化率;
10、车辆运动状态解析单元还用于根据当前车辆速度、当前车辆档位和车辆速度保持时间进行动静态识别后得到车辆动静态识别结果;车辆运动状态解析单元还用于根据车辆侧向加速度、车辆横摆加速度、车辆纵向加速度、车辆加速踏板开度信息和车辆制度踏板开度信息进行稳定性识别后得到车辆横纵向稳定性识别结果;车辆运动状态解析单元还用于根据悬架高度变化率信息进行工况识别后得到举升工况识别结果;车辆运动状态解析单元还用于根据车辆主动悬架主回路的内部压力和空气弹簧设备的内部压力进行超载识别得到车辆超载识别结果;车辆运动状态解析单元还用于根据空气弹簧设备的实际高度和空气弹簧设备的高度变化率进行掉坑情况识别后得到车轮掉坑情况识别结果;其中,状态识别结果包括车辆运动状态解析结果;车辆运动状态解析结果包括车辆动静态识别结果、车辆横纵向稳定性识别结果、举升工况识别结果、车辆超载识别结果和车轮掉坑情况识别结果。
11、在其中一个实施例中,状态解析模块包括车辆部件状态解析单元;
12、其中,车辆部件状态解析单元用于获取四轮高度传感器采集的脉冲宽度调制信号、压缩机温度传感器采集的电压信号、压力传感器采集的电压信号、各空气弹簧回路的电磁阀通断状态和车辆主动悬架的电磁阀电流信号;设备工作数据包括四轮高度传感器采集的脉冲宽度调制信号、压缩机温度传感器采集的电压信号、压力传感器采集的电压信号、各空气弹簧回路的电磁阀通断状态和电磁阀电流信号;
13、车辆部件状态解析单元还用于根据四轮高度传感器采集的脉冲宽度调制信号进行高度识别后得到悬架高度识别结果;车辆部件状态解析单元还用于根据压缩机温度传感器采集的电压信号进行温度识别后得到温度识别结果;车辆部件状态解析单元还用于根据压力传感器采集的电压信号进行弹簧压力识别后得到空气弹簧压力识别结果;车辆部件状态解析单元还用于根据各空气弹簧回路的电磁阀通断状态进行压力识别后得到对应的空气弹簧回路的压力识别结果;车辆部件状态解析单元还用于根据电磁阀电流信号进行电磁阀状态识别后得到电磁阀状态识别结果;其中,状态识别结果包括车辆部件状态解析结果;车辆部件状态解析结果包括悬架高度识别结果、温度识别结果、空气弹簧压力识别结果、各空气弹簧回路的压力识别结果和电磁阀状态识别结果。
14、在其中一个实施例中,状态解析模块包括预瞄路面解析单元;
15、其中,预瞄路面解析单元用于获取智能驾驶系统传感器采集的路面特征信息;设备工作数据包括路面特征信息;
16、预瞄路面解析单元还用于根据路面特征信息进行路面特征识别后得到路面特征识别结果;其中,状态识别结果包括路面特征识别结果。
17、在其中一个实施例中,故障诊断模块包括通信故障诊断单元、硬线故障诊断单元和车辆部件故障诊断单元;
18、其中,通信故障诊断单元用于获取车辆主动悬架的控制器局域网总线信号,还用于根据控制器局域网总线信号进行通信故障诊断后得到通信故障诊断结果;故障监测数据包括控制器局域网总线信号;故障诊断结果包括通信故障诊断结果;
19、硬线故障诊断单元用于获取小电瓶电压和传感器硬线信号,还用于根据小电瓶电压和传感器硬线信号进行硬线故障诊断后得到硬线故障诊断结果;故障监测数据包括小电瓶电压和传感器硬线信号;故障诊断结果包括硬线故障诊断结果;
20、车辆部件故障诊断单元用于获取悬架高度识别结果、温度识别结果、空气弹簧压力识别结果、各空气弹簧回路的压力识别结果和电磁阀状态识别结果,还用于根据悬架高度识别结果、温度识别结果和各各空气弹簧回路的压力识别结果进行弹簧故障诊断后得到空气弹簧设备的故障诊断结果;车辆部件故障诊断单元还用于根据电磁阀状态识别结果进行减振故障诊断后得到连续减振控制设备的故障诊断结果;其中,状态识别结果包括车辆部件状态解析结果;车辆部件状态解析结果包括悬架高度识别结果、温度识别结果、空气弹簧压力识别结果、各空气弹簧回路的压力识别结果和电磁阀状态识别结果。
21、在其中一个实施例中,控制执行模块包括高度解析单元和主动阻尼解析单元;
22、其中,高度解析单元用于获取当前车辆模式和当前车辆速度,还用于根据当前车辆模式、当前车辆速度、车辆运动状态解析结果和路面特征识别结果进行数据解析后得到空气弹簧设备的需求高度;空气弹簧设备的需求高度包括手动调节需求高度、随速调节需求高度、后备箱装载模式需求高度和迎宾模式需求高度;
23、主动阻尼解析单元用于获取当前车辆模式和当前车辆速度,还用于根据当前车辆模式、当前车辆速度、车辆运动状态解析结果和路面特征识别结果进行数据解析后得到连续减振控制设备的需求主动阻尼;连续减振控制设备的需求主动阻尼包括手动调节需求主动阻尼档位、随速调节需求主动阻尼档位、起步抗后蹲主动阻尼档位、制动抗点头主动阻尼档位、抗倾侧主动阻尼档位和路面补偿主动阻尼档位;其中,状态识别结果包括车辆运动状态解析结果和路面特征识别结果。
24、在其中一个实施例中,目标仲裁模块包括目标高度仲裁单元和目标主动阻尼仲裁单元;
25、其中,目标高度仲裁单元用于根据需求高度和预设的优先级顺序进行高度仲裁后得到高度仲裁结果,还用于根据高度仲裁结果、车辆运动状态解析结果和空气弹簧设备的故障诊断结果进行逐级调节后得到空气弹簧设备的目标高度;
26、目标主动阻尼仲裁单元用于根据需求主动阻尼和优先级顺序进行阻尼仲裁后得到阻尼仲裁结果,还用于根据阻尼仲裁结果、车辆运动状态解析结果和连续减振控制设备的故障诊断结果进行逐级调节后得到连续减振控制设备的目标阻尼;其中,状态识别结果包括车辆运动状态解析结果。
27、在其中一个实施例中,控制执行模块包括阀泵控制单元和电磁阀控制单元;
28、其中,阀泵控制单元用于根据目标高度和空气弹簧设备的实际高度的差控制空气弹簧设备的阀泵;
29、电磁阀控制单元用于根据目标阻尼控制连续减振控制设备的电磁阀。
30、第二方面,提供了一种soa架构的车辆主动悬架控制系统的控制方法,其特征在于,上述控制方法包括:
31、通过状态解析模块获取车辆设备的设备工作数据,并对所述设备工作数据进行车辆状态识别后得到状态识别结果;
32、通过故障诊断模块获取车辆设备的故障监测数据,并对所述故障监测数据进行故障诊断后得到故障诊断结果;其中,所述故障诊断结果包括车辆部件故障诊断结果;所述车辆部件故障诊断结果包括空气弹簧设备的故障诊断结果和连续减振控制设备的故障诊断结果;
33、通过需求解析模块获取当前车辆模式和当前车辆速度,并根据所述当前车辆模式、所述当前车辆速度和所述状态识别结果进行数据解析后得到数据解析结果;其中,所述数据解析结果包括所述空气弹簧设备的需求高度和所述连续减振控制设备的需求主动阻尼;
34、通过目标仲裁模块根据所述需求高度、所述状态识别结果和所述空气弹簧设备的故障诊断结果进行高度仲裁和逐级调节后得到所述空气弹簧设备的目标高度,并根据所述需求主动阻尼、所述状态识别结果和所述连续减振控制设备的故障诊断结果进行阻尼仲裁和逐级调节后得到所述连续减振控制设备的目标阻尼;
35、通过控制执行模块根据所述目标高度对所述空气弹簧设备的阀泵进行控制,并根据所述目标阻尼对所述连续减振控制设备的电磁阀进行控制。
36、第三方面,提供了一种计算机设备,该计算机设备包括存储器和处理器,存储器存储有计算机程序,处理器执行所述计算机程序时实现上述方法实施例中任一控制方法的步骤。
37、第四方面,提供了一种计算机可读存储介质,该计算机可读存储介质上存储有计算机程序,计算机程序被处理器执行时实现上述方法实施例中任一控制方法的步骤。
38、上述基于soa架构的车辆主动悬架控制系统、基于soa架构的车辆主动悬架控制系统的控制方法、计算机设备和存储介质,通过状态解析模块获取车辆设备的设备工作数据,并对设备工作数据进行车辆状态识别后得到状态识别结果;然后,通过故障诊断模块获取车辆设备的故障监测数据,并对故障监测数据进行故障诊断后得到故障诊断结果;其中,故障诊断结果包括车辆部件故障诊断结果;车辆部件故障诊断结果包括空气弹簧设备的故障诊断结果和连续减振控制设备的故障诊断结果;接着,通过需求解析模块获取当前车辆模式和当前车辆速度,并根据当前车辆模式、当前车辆速度和状态识别结果进行数据解析后得到数据解析结果;其中,数据解析结果包括空气弹簧设备的需求高度和连续减振控制设备的需求主动阻尼;同时,通过目标仲裁模块根据需求高度、状态识别结果和空气弹簧设备的故障诊断结果进行高度仲裁和逐级调节后得到空气弹簧设备的目标高度,并根据需求主动阻尼、状态识别结果和连续减振控制设备的故障诊断结果进行阻尼仲裁和逐级调节后得到连续减振控制设备的目标阻尼;最后,通过控制执行模块根据目标高度对空气弹簧设备的阀泵进行控制,并根据目标阻尼对连续减振控制设备的电磁阀进行控制,从而避免了空气弹簧设备和连续减振控制设备的电磁阀的控制相互独立,提升了车辆主动悬架控制系统的综合性能。同时,避免了信号重复调用,提高了车辆主动悬架控制系统的软件开发效率和运动效率。此外,车辆主动悬架控制系统通过基于soa架构形成,通过不同模块分别执行对应功能,实现软件分层解耦,可重复调用,降低车辆主动悬架控制系统的耦合性,提升车辆主动悬架控制系统的可移植性,最大化车辆主动悬架控制系统的开发效率和软件鲁棒性。
- 还没有人留言评论。精彩留言会获得点赞!