车辆预见性自适应巡航控制系统及方法
本技术涉及车辆控制,特别涉及一种车辆预见性自适应巡航控制系统及方法。
背景技术:
1、目前商用车的发展仍然面临着燃油消耗大、安全事故多发等问题的挑战。因此,如何实现商用车,尤其是卡车的安全与节能驾驶已经成为全球各个国家关注的关键问题。
2、相关技术中,可以利用智能网联技术,通过车端与云端的数据互通实现利用云端资源实现车辆经济车速规划;还可以利用考虑跟车经济性的acc(adaptive cruisecontrol,自适应巡航系统)技术实现车辆经济车速规划。
3、然而,相关技术中,基于云控平台以及智能网联技术的车辆经济车速规划算法,均假设车辆在不受周围环境车辆影响下行驶且假设车辆行驶时不存在通信中断或者地图缺失等问题。但在实际交通条件下,车辆的行驶状况可能会受到前车的影响,导致车辆的安全性与经济性无法兼顾。并且当车辆的通信中断或道路地图缺失时,无法给出相应的解决方案,车辆无法根据当前的行驶状态做出最优的驾驶模式判断;
4、而考虑跟车经济性的acc技术中,一部分基于道路坡度,建立自适应跟车的非线性mpc(model predictive control,模型预测控制)最优控制问题,占用的运算资源多,且用时长,满足不了要求高实时性的被控系统,难以真正的实现车辆的经济跟车行驶;另一部分仅通过考虑mpc代价中的能耗等权重项,或是从电机的能耗或车辆加速度的角度考虑燃油经济性,仅从表面数据进行经济性的考虑,难以进行安全经济车速的规划。
5、综上所述,相关技术中,难以兼顾车辆的运算资源消耗和策略输出的稳定性,且仅从表面数据进行经济性的考虑,难以进行安全经济车速的规划,有待改进。
技术实现思路
1、本技术提供一种车辆预见性自适应巡航控制系统及方法,以解决相关技术中,难以兼顾车辆的运算资源消耗和策略输出的稳定性,且仅从表面数据进行经济性的考虑,难以进行安全经济车速的规划等技术问题。
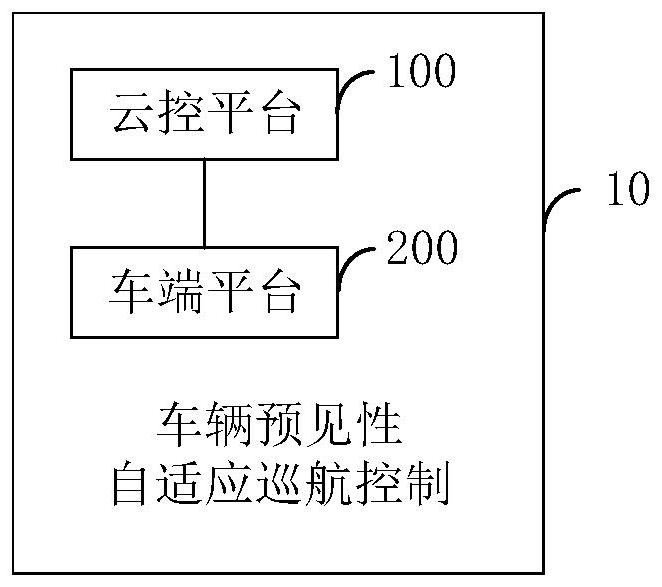
2、本技术第一方面实施例提供一种车辆预见性自适应巡航控制系统,包括:云控平台和车端平台,其中,所述云控平台,用于接收所述车端平台发送的状态信息和位置信息,并根据所述位置信息确定所述车端平台控制的车辆的前方道路的高程信息,并基于所述状态信息、所述位置信息和所述高程信息生成所述车辆的经济速度规划策略,并发送至所述车端平台;所述车端平台,用于采集并发送所述状态信息和所述位置信息至所述云控平台之外,接收所述云控平台发送的经济速度规划策略,并基于所述车辆的当前巡航状态和所述经济速度规划策略构建车速融合规划模型,以基于所述车速融合规划模型的计算结果调节所述车辆的目标车速,使得所述目标车速满足预设跟车安全与节能要求。
3、可选地,在本技术的一个实施例中,所述云控平台包括:定位模块,用于解析所述位置信息,并基于所述位置信息得到所述车辆的当前定位信息;高精地图模块,用于基于所述当前定位信息确定所述前方道路的静态道路地图,并基于所述静态道路地图得到所述前方道路的高程信息;经济速度规划模块,用于基于所述当前定位信息和所述高程信息生成所述经济速度规划策略。
4、可选地,在本技术的一个实施例中,所述经济速度规划模块进一步用于,基于所述状态信息,利用预设动力学模型得到所述车辆在行驶过程中的纵向力;基于所述状态信息,利用预设发动机油耗模型得到所述车辆的燃油消耗率;利用所述状态信息、所述纵向力和所述燃油消耗率构建目标函数,并根据所述高程信息设置所述目标函数和所述预设动力学模型的约束条件,以得到用于动态规划求解的离散化预测性巡航控制数学模型;求解所述离散化预测性巡航控制数学模型得到所述经济速度规划策略。
5、可选地,在本技术的一个实施例中,所述离散化预测性巡航控制数学模型为,
6、
7、subjectto
8、
9、k=0,1,…,n-1,vk>0
10、tmin≤tek≤tmax
11、vmin≤vk≤vmax
12、ωmin≤ωek≤ωmax
13、amin≤ak≤amax
14、其中,w1为油耗项权重,w2为车速与参考速度的偏离项权重,w3为车速变化值权重,w4为油门开度变化值权重,w5为行驶效率权重,vref为参考速度,vk为k阶段车速,αck为定速巡航模式下的k阶段油门开度值,αpk为预见性巡航模式下的k阶段油门开度值,δt(k,k+1)为k到k+1阶段所用的时间,δs为相邻两个阶段间的距离,为k时刻的车辆燃油消耗率,cd为空气阻力系数,a为迎风面积,g为重力加速度,f为滚动阻力系数,δ为车辆旋转质量换算系数,tek为阶段k的发动机转矩,ωek为k阶段的发动机转速,ak为k阶段的车辆加速度,tmin与tmax为最小与最大扭矩边界,vmin与vmax为最小与最大车速边界,ωmin与ωmax为最小与最大转速边界,amin与amax为最小与最大加速度边界。
15、可选地,在本技术的一个实施例中,所述车端平台包括:巡航模式切换模块,用于根据所述状态信息、所述车辆与所述云控平台之间的通信状态和所述位置信息判断所述车辆的当前巡航状态;跟车安全与节能的车速融合规划模块,用于根据所述状态信息和所述经济速度规划策略建立车速融合规划模型,以利用所述车速融合规划模型得到所述目标车速;车辆模块,用于根据所述车辆的运行参数得到所述状态信息,根据地图信息得到所述车辆的所述位置信息,将所述状态信息和所述位置信息上传至所述云控平台,并根据所述目标车速调节所述车辆的当前行驶速度。
16、可选地,在本技术的一个实施例中,所述巡航模式切换模块进一步用于,根据所述状态信息、所述通信状态和所述地图信息切换所述车辆的当前巡航状态,其中,所述当前巡航状态包括acc自适应巡航系统模式巡航状态、pcc预测性巡航控制系统模式巡航状态、pacc预见性自适应巡航系统模式巡航状态和人工驾驶模式行驶状态。
17、可选地,在本技术的一个实施例中,所述跟车安全与节能的车速融合规划模块进一步用于基于所述状态信息得到所述当前车辆在跟车状态下的实际跟车信息;根据所述状态信息、所述实际跟车信息和所述经济速度规划策略建立车速融合规划模型;构建所述车速融合规划模型的实际动力学约束,利用所述实际动力学约束求解所述车速融合规划模型得到所述目标车速。
18、可选地,在本技术的一个实施例中,所述车速融合规划模型的状态空间表达式为,
19、x(k+1)=ax(k)+bu(k)+gw(k)y(k)=cx(k)-z
20、y(k)=cx(k)-z
21、其中,
22、x(k)=[δd(k),vh(k),ve(k),ah(k),jerk(k)]t
23、y(k)=[δ(k),ve(k),vr(k),ah(k),j(k)]t
24、u(k)=ades(k)
25、w(k)=ap(k)
26、其中,x(k)为状态变量,δd(k)为k时刻所述车辆与前车的相对距离,vh(k)为所述车辆的车速,ve(k)为所述车辆与前车的相对车速,ah(k)为所述车辆的加速度,jerk(k)为所述车辆的跃度,x(k+1)为k+1时刻的状态变量,y(k)为状态变量,δ(k)为k时刻的车间距误差,vpcc为经济车速序列,vr(k)为所述车辆与经济车速的差值,j(k)为所述车辆的跃度构成的输出变量,u(k)为k时刻控制输入变量,ades(k)为期望加速度,w(k)为k时刻的外部干扰量,ap(k)为前车的加速度。
27、本技术第二方面实施例提供一种车辆预见性自适应巡航控制方法,应用于云控平台,其中,所述方法包括以下步骤:接收至少一个车端平台发送的状态信息和位置信息;根据所述位置信息确定所述车端平台控制的车辆的前方道路的高程信息;基于所述状态信息、所述位置信息和所述高程信息生成所述车辆的经济速度规划策略,并发送至所述车端平台。
28、本技术第三方面实施例提供一种车辆预见性自适应巡航控制方法,应用于车端平台,其中,所述方法包括以下步骤:采集车辆的状态信息和位置信息;发送所述状态信息和所述位置信息至云控平台;接收所述云控平台发送的经济速度规划策略,并基于所述车辆的当前巡航状态和所述经济速度规划策略构建车速融合规划模型,以基于所述车速融合规划模型的计算结果调节所述车辆的目标车速,使得所述目标车速满足预设跟车安全与节能要求,其中,所述经济速度规划策略由所述状态信息和所述位置信息得到。
29、本技术第四方面实施例提供一种服务器,包括:存储器、处理器及存储在所述存储器上并可在所述处理器上运行的计算机程序,所述处理器执行所述程序,以实现如上述实施例所述的车辆预见性自适应巡航控制方法。
30、本技术第五方面实施例提供一种车辆,包括:存储器、处理器及存储在所述存储器上并可在所述处理器上运行的计算机程序,所述处理器执行所述程序,以实现如上述实施例所述的车辆预见性自适应巡航控制方法。
31、本技术第六方面实施例提供一种计算机可读存储介质,所述计算机可读存储介质存储计算机指令,所述计算机指令用于使所述计算机执行如上述实施例所述的车辆预见性自适应巡航控制方法。
32、本技术实施例可以利用车端平台采集车辆的状态信息和位置信息,并将状态信息和位置信息上传到云控平台,云控平台可以根据状态信息和位置信息确定车辆的经济速度规划策略,使得车端平台可以将经济速度规划策略作为目标车速调整的参考,从而实现车辆的预见性自适应巡航,将云端算法与车端的算法进行紧密结合,降低车端的计算量,提高算法的实时性,并可以根据车辆状态变化进行速度规划调整,从而兼顾安全性与经济性。由此,解决了相关技术中,难以兼顾车辆的运算资源消耗和策略输出的稳定性,且仅从表面数据进行经济性的考虑,难以进行安全经济车速的规划等技术问题。
33、本技术附加的方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本技术的实践了解到。
- 还没有人留言评论。精彩留言会获得点赞!