一种车辆控制方法、车辆及计算机可读存储介质与流程
本公开实施例涉及车辆,更具体地,涉及一种车辆控制方法、一种车辆、及一种计算机可读存储介质。
背景技术:
1、对开路面是指车辆的同轴车轮所行驶的附着系数差异较大的路面。
2、当车辆在对开路面上加速行驶或制动行驶时,由于路面附着系数差异和差动制动作用,导致车辆两侧的纵向力出现偏差,使其产生一个绕质心旋转的附加横摆力矩,导致车辆出现方向盘抖动、车身一定幅度横摆以及车辆甩尾等现象,影响驾驶员和车辆的安全。
技术实现思路
1、本公开实施例的一个目的是提供一种控制车辆在对开路面上平稳行驶的新的技术方案。
2、根据本公开实施例的第一方面,提供了一种车辆控制方法,包括:
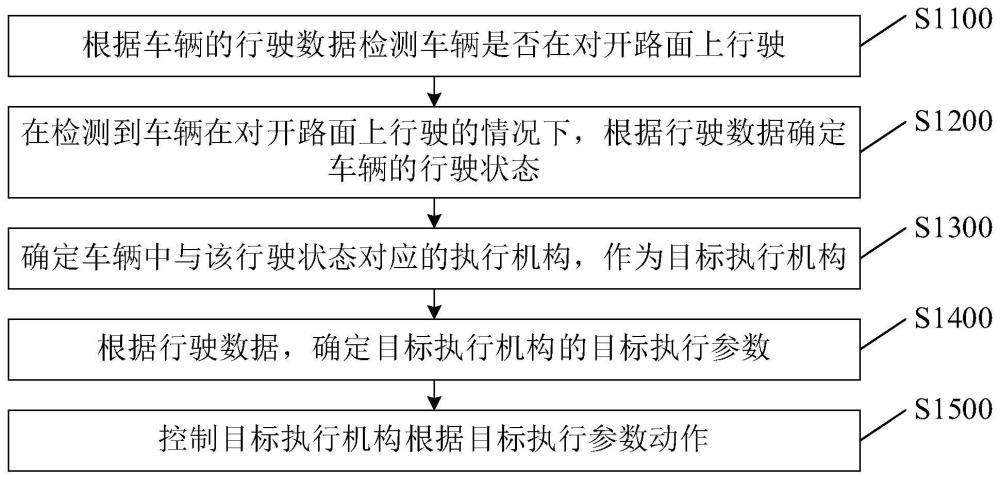
3、获取车辆的行驶数据,根据所述行驶数据检测所述车辆是否在对开路面上行驶;
4、在检测到所述车辆在对开路面上行驶的情况下,根据所述行驶数据确定所述车辆的行驶状态;
5、确定所述车辆中与所述行驶状态对应的执行机构,作为目标执行机构;
6、根据所述行驶数据和/或所述行驶状态,确定所述目标执行机构的目标执行参数,所述目标执行参数为使得所述车辆在所述对开路面影响下所产生的横摆力矩减小的执行参数;
7、控制所述目标执行机构根据所述目标执行参数动作。
8、可选的,所述根据车辆的行驶数据检测所述车辆是否在对开路面上行驶,包括:
9、根据所述行驶数据,确定所述车辆中第一车轮的第一滑移率和第二车轮的第二滑移率;其中,所述第一车轮和所述第二车轮位于所述车辆的同一连接轴上,且所述第一车轮和所述第二车轮为驱动轮;
10、确定所述第一滑移率和所述第二滑移率之间的滑移率差值;
11、根据所述滑移率差值检测所述车辆是否在对开路面上行驶。
12、可选的,在所述行驶状态为加速状态的情况下,所述目标执行机构包括制动系统,所述目标执行参数包括目标车轮的目标制动力,所述目标车轮为所述车辆位于低附着路面的驱动轮,所述低附着路面为对开路面中地面附着系数较低的一侧;
13、所述根据所述行驶数据和/或所述行驶状态,确定所述目标执行机构的目标执行参数,包括:
14、根据所述行驶数据,确定所述车辆的转向轮的当前转向角、所述车辆的质心到所述车辆的第一连接轴的第一距离、所述质心到所述车辆的第二连接轴的第二距离、所述车辆的每一车轮的侧向力和纵向力;
15、根据所述当前转向角、所述第一距离、所述第二距离、所述侧向力和所述纵向力,确定所述目标制动力。
16、可选的,在所述行驶状态为加速状态的情况下,所述目标执行机构包括制动系统,所述目标执行参数包括目标车轮的目标制动力,所述目标车轮为所述车辆位于低附着路面的驱动轮,所述低附着路面为对开路面中地面附着系数较低的一侧;
17、所述方法还包括:
18、获取所述目标车轮的当前制动力;
19、根据预设步长和所述当前制动力,得到所述目标制动力。
20、可选的,所述目标执行机构包括主动转向系统,所述目标执行参数包括所述主动转向系统的目标转向角;
21、所述根据所述行驶数据和/或所述行驶状态,确定所述目标执行机构的目标执行参数,包括:
22、根据所述行驶数据确定所述车辆的质心到所述车辆的第一连接轴的第一距离、所述质心到所述车辆的第二连接轴的第二距离、所述车辆的每一车轮的侧向力和纵向力;
23、获取所述车辆的目标车轮的当前制动力;其中,所述目标车轮为所述车辆位于低附着路面的驱动轮,所述低附着路面为对开路面中地面附着系数较低的一侧;
24、根据所述当前制动力、所述第一距离、所述第二距离、所述侧向力和所述纵向力,确定所述目标转向角。
25、可选的,所述目标执行参数还包括所述主动转向系统的转向方向,
26、所述根据所述行驶数据和/或所述行驶状态,确定所述目标执行机构的目标执行参数,还包括:
27、在所述行驶状态为加速状态的情况下,确定所述转向方向为第一方向;
28、在所述行驶状态为减速状态的情况下,确定所述转向方向为第二方向;
29、所述第一方向为使得所述车辆朝高附附着路面转动的方向,所述第二方向为使得所述车辆朝低附着路面转动的方向,所述高附附着路面为对开路面中地面附着系数较高的一侧,所述低附附着路面为对开路面中地面附着系数较低的一侧。
30、可选的,所述目标执行机构包括悬架控制系统,所述目标执行参数包括悬架的目标驱动电流,
31、所述根据所述行驶数据和/或所述行驶状态,确定所述目标执行机构的目标执行参数,包括:
32、根据所述行驶数据确定所述车辆的侧倾角加速度;
33、获取所述车辆的每个车轮的当前悬架高度;
34、根据所述侧倾角加速度和每个车轮的当前悬架高度,得到每个车轮的悬架的目标驱动电流。
35、可选的,所述根据所述行驶数据确定所述车辆的侧倾角加速度,包括:
36、根据所述行驶数据,确定每个车轮的当前纵向力;
37、根据所述行驶数据和所述当前纵向力,确定所述车辆的横摆力矩;
38、根据所述行驶数据,确定所述车辆的簧上质量质心到所述车辆的第一连接轴的第三距离、所述簧上质量质心到所述车辆的第二连接轴的第四距离、和所述簧上质量质心高度;
39、根据所述横摆力矩、所述第三距离、所述第四距离和所述簧上质量质心高度,得到所述侧倾角加速度。
40、可选的,所述根据所述行驶数据,确定每个车轮的当前纵向力,包括:
41、根据所述行驶数据,确定每个车轮的有效地面附着系数和每个车轮的当前载荷;
42、根据所述有效地面附着系数和所述当前载荷,确定车辆的每个车轮的当前纵向力。
43、可选的,根据所述行驶数据,确定每个车轮的当前载荷,包括:
44、根据所述行驶数据,确定所述车辆的质心到所述第一连接轴的第一距离、所述质心到所述第二连接轴的第二距离、及所述质心的高度;
45、根据所述第一距离和所述第二距离,确定所述第一连接轴的第一静态载荷和所述第二连接轴的第二静态载荷;
46、根据所述质心的高度确定所述第一连接轴向所述第二连接轴转移的第一载荷转移量、所述车辆的第一侧向第二侧转移的第二载荷转移量;
47、根据所述第一静态载荷、所述第二静态载荷、第一载荷转移量和第二载荷转移量,确定每个车轮的当前载荷。
48、可选的,所述目标执行机构包括驱动系统,所述目标执行参数包括所述车辆的第一连接轴和第二连接轴的驱动扭矩的输出比例;
49、所述根据所述行驶数据和/或所述行驶状态,确定所述目标执行机构的目标执行参数,包括:
50、根据所述行驶数据确定所述车辆的横向加速度、纵向加速度;
51、根据所述横向加速度和所述纵向加速度确定所述车辆的有效地面附着系数;
52、根据所述横向加速度、所述纵向加速度和所述有效地面附着系数,确定所述输出比例。
53、根据本公开的第二方面,提供了一种车辆,包括处理器和存储器,所述存储器用于存储计算机程序,所述处理器用于在所述计算机程序的控制下,执行如本公开第一方面所述的方法。
54、根据本公开的第三方面,提供了一种计算机可读存储介质,其上存储有计算机程序,所述计算机程序在被处理器执行时实现如本公开第一方面所述的方法。
55、通过本公开的实施例,车辆在对开路面上行驶的情况下,确定与车辆的行驶状态对应的目标执行机构,根据行驶数据和/或行驶状态,确定目标执行机构的目标执行参数,并控制目标执行机构根据目标执行参数动作,以减小车辆由于对开路面影响所产生的横摆力矩,保障车辆和驾驶员的安全。
56、通过以下参照附图对本发明的示例性实施例的详细描述,本发明的其它特征及其优点将会变得清楚。
- 还没有人留言评论。精彩留言会获得点赞!