一种用于提升车辆经济性的智能驾驶方法及装置与流程
本技术涉及车辆控制,具体涉及一种用于提升车辆经济性的智能驾驶方法及装置。
背景技术:
1、随着智能化的普及,越来越多的用户选择智能汽车。因其智能化程度高,特别是在一定范围内实现智能驾驶,来降低驾驶员疲劳感和提升安全性。当前智能汽车配有多传感器、高精地图信息等信息输入,但是大都仅给智能驾驶部分使用,未普及至整车其他特性。汽车的经济性作为产品核心特性,整车经济性越好,汽车的续航里程越高,解决里程焦虑。当前智能驾驶软件开发过程中,并未考虑提升整车经济性。如汽车在坡度起伏的路面上激活智能驾驶功能,汽车会根据驾驶员设置的车速进行定速行驶。并未根据实际道路变化,合理进行纵向速度规划。
2、如在下坡路段,为了维持自车巡航车速,会制动介入来维持稳定的车速。实际在下坡路段,可以利用重力势能为自车提供动力,后上坡路段通过自车惯性冲坡,减少油量消耗,实现汽车在上坡下坡工况下的能量利用,从而提高整车经济性。现如今尚缺乏一种能够结合车辆工况进行整车调控的手段,以提高整车经济性。
3、因此,为满足当前使用需求,现提供一种用于提升车辆经济性的智能驾驶技术。
技术实现思路
1、本技术提供一种用于提升车辆经济性的智能驾驶方法及装置,基于目标车辆的车辆行驶数据以及当前路段相关信息,合理规划车速和纵向加速度,实现整车对道路信息合理利用,提升整车经济性,从而提高续航里程。
2、为实现上述目的,本技术提供以下方案。
3、第一方面,本技术提供了一种用于提升车辆经济性的智能驾驶方法,所述方法包括以下步骤:
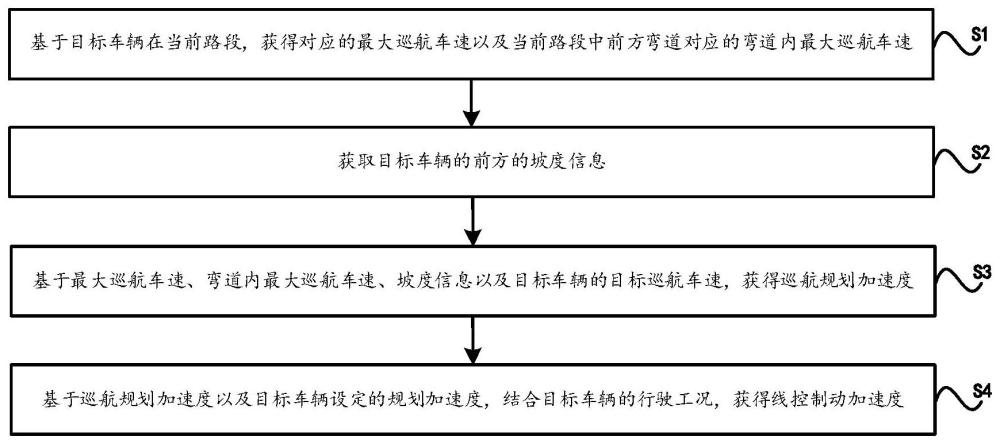
4、基于所述目标车辆在当前路段,获得对应的最大巡航车速以及所述当前路段中前方弯道对应的弯道内最大巡航车速;
5、获取所述目标车辆的前方的坡度信息;
6、基于所述最大巡航车速、所述弯道内最大巡航车速、所述坡度信息以及所述目标车辆的目标巡航车速,获得巡航规划加速度;
7、基于所述巡航规划加速度以及所述目标车辆设定的规划加速度,结合目标车辆的行驶工况,获得线控制动加速度。
8、进一步的,所述方法还包括以下步骤:
9、基于所述当前路段的道路限速信息,获得所述最大巡航车速。
10、进一步的,所述方法还包括以下步骤:
11、基于所述当前路段中前方弯道的曲率以及曲率变化率,获得所述弯道内最大巡航车速。
12、进一步的,基于所述最大巡航车速、弯道内最大巡航车速、所述坡度信息以及所述目标车辆的目标巡航车速,获得巡航规划加速度,包括以下步骤:
13、当所述坡度信息的所述最大坡度信息以及所述最小坡度信息中的斜坡坡度均大于0时,判断所述目标车辆处于爬坡工况,设定对应的目标斜坡车速与所述目标巡航车速的数值相等;
14、基于所述目标斜坡车速与所述目标车辆的当前车速,计算获得巡航规划加速度。
15、进一步的,基于所述最大巡航车速、弯道内最大巡航车速、所述坡度信息以及所述目标车辆的目标巡航车速,获得巡航规划加速度,包括以下步骤:
16、当所述坡度信息的所述最大坡度信息以及所述最小坡度信息中的斜坡坡度均小于0时,判断所述目标车辆处于下坡工况,基于所述目标巡航车速以及预设第一系数,设定对应的目标斜坡车速;
17、当所述目标车辆的当前车速与所述目标斜坡车速的数值相等时,计算获得对应的巡航规划加速度;
18、所述巡航规划加速度以使得所述目标车辆的当前车速与所述目标斜坡车速的数值保持相等;其中,
19、所述目标斜坡车速不大于所述最大巡航车速和所述弯道内最大巡航车速。
20、进一步的,基于所述最大巡航车速、弯道内最大巡航车速、所述坡度信息以及所述目标车辆的目标巡航车速,获得巡航规划加速度,包括以下步骤:
21、当所述坡度信息的所述最大坡度信息的斜坡坡度大于0,所述坡度信息的所述最小坡度信息的斜坡坡度小于0,且所述最大坡度信息的斜坡距离大于所述最小坡度信息的斜坡距离时,判定所述目标车辆处于先下坡后上坡工况;
22、在对应的下坡曲线段,限制所述巡航规划加速度的大于0,基于所述目标巡航车速以及预设第一系数,设定所述下坡曲线段对应的目标斜坡车速;
23、若目标车辆在所述下坡曲线段进行滑行时,所述目标车辆的当前车速达到所述下坡曲线段对应的目标斜坡车速时,计算获得对应的巡航规划加速度,用以限制所述目标车辆的当前车速不大于所述下坡曲线段对应的目标斜坡车速;
24、若目标车辆由所述下坡曲线段驶入上坡曲线段时,所述巡航规划加速度的初始值设定为0,基于所述目标巡航车速以及预设第二系数,设定所述上坡曲线段对应的目标斜坡车速;
25、当所述目标车辆在所述上坡曲线段进行行驶时,若所述目标车辆的当前车速小于所述上坡曲线段对应的目标斜坡车速,计算获得对应的所述巡航规划加速度,用以限制所述目标车辆的当前车速不小于所述上坡曲线段对应的目标斜坡车速。
26、进一步的,基于所述最大巡航车速、弯道内最大巡航车速、所述坡度信息以及所述目标车辆的目标巡航车速,获得巡航规划加速度,包括以下步骤:
27、当所述坡度信息的所述最大坡度信息的斜坡坡度大于0,所述坡度信息的所述最小坡度信息的斜坡坡度小于0,且所述最大坡度信息的斜坡距离小于所述最小坡度信息的斜坡距离时,判定所述目标车辆处于先上坡后下坡工况;
28、基于所述目标巡航车速以及预设第一系数,设定对应的目标斜坡车速;
29、若目标车辆在所述上坡曲线段进行行驶时,计算获得对应的巡航规划加速度,用以限制所述目标车辆的当前车速不小于所述目标斜坡车速;
30、若目标车辆由所述上坡曲线段驶入下坡曲线段时,所述巡航规划加速度设定为0;
31、当所述目标车辆在所述下坡曲线段进行滑行时,计算获得对应的所述巡航规划加速度,用以限制所述目标车辆的当前车速不大于所述目标斜坡车速。
32、优选的,所述预设第一系数大于1。
33、优选的,所述预设第二系数为小数。
34、第二方面,本技术提供了一种用于提升车辆经济性的智能驾驶装置,所述装置包括:
35、路段信息获取模块,其用于基于所述目标车辆在当前路段,获得对应的最大巡航车速以及所述当前路段中前方弯道对应的弯道内最大巡航车速;
36、坡度获取模块,其用于获取所述目标车辆的前方的坡度信息;
37、巡航规划模块,其用于基于所述最大巡航车速、所述弯道内最大巡航车速、所述坡度信息以及所述目标车辆的目标巡航车速,获得巡航规划加速度;
38、线控调节模块,其用于基于所述巡航规划加速度以及所述目标车辆设定的规划加速度,结合目标车辆的行驶工况,获得线控制动加速度。
39、进一步的,路段信息获取模块还用于基于所述当前路段的道路限速信息,获得所述最大巡航车速。
40、进一步的,路段信息获取模块还用于基于所述当前路段中前方弯道的曲率以及曲率变化率,获得所述弯道内最大巡航车速。
41、进一步的,巡航规划模块还用于当所述坡度信息的所述最大坡度信息以及所述最小坡度信息中的斜坡坡度均大于0时,判断所述目标车辆处于爬坡工况,设定对应的目标斜坡车速与所述目标巡航车速的数值相等;
42、巡航规划模块还用于基于所述目标斜坡车速与所述目标车辆的当前车速,计算获得巡航规划加速度。
43、进一步的,巡航规划模块还用于当所述坡度信息的所述最大坡度信息以及所述最小坡度信息中的斜坡坡度均小于0时,判断所述目标车辆处于下坡工况,基于所述目标巡航车速以及预设第一系数,设定对应的目标斜坡车速;
44、巡航规划模块还用于当所述目标车辆的当前车速与所述目标斜坡车速的数值相等时,计算获得对应的巡航规划加速度;
45、巡航规划模块还用于所述巡航规划加速度以使得所述目标车辆的当前车速与所述目标斜坡车速的数值保持相等;其中,
46、所述目标斜坡车速不大于所述最大巡航车速和所述弯道内最大巡航车速。
47、进一步的,巡航规划模块还用于当所述坡度信息的所述最大坡度信息的斜坡坡度大于0,所述坡度信息的所述最小坡度信息的斜坡坡度小于0,且所述最大坡度信息的斜坡距离大于所述最小坡度信息的斜坡距离时,判定所述目标车辆处于先下坡后上坡工况;
48、巡航规划模块还用于在对应的下坡曲线段,限制所述巡航规划加速度的大于0,基于所述目标巡航车速以及预设第一系数,设定所述下坡曲线段对应的目标斜坡车速;
49、巡航规划模块还用于若目标车辆在所述下坡曲线段进行滑行时,所述目标车辆的当前车速达到所述下坡曲线段对应的目标斜坡车速时,计算获得对应的巡航规划加速度,用以限制所述目标车辆的当前车速不大于所述下坡曲线段对应的目标斜坡车速;
50、巡航规划模块还用于若目标车辆由所述下坡曲线段驶入上坡曲线段时,所述巡航规划加速度的初始值设定为0,基于所述目标巡航车速以及预设第二系数,设定所述上坡曲线段对应的目标斜坡车速;
51、巡航规划模块还用于当所述目标车辆在所述上坡曲线段进行行驶时,若所述目标车辆的当前车速小于所述上坡曲线段对应的目标斜坡车速,计算获得对应的所述巡航规划加速度,用以限制所述目标车辆的当前车速不小于所述上坡曲线段对应的目标斜坡车速。
52、进一步的,巡航规划模块还用于当所述坡度信息的所述最大坡度信息的斜坡坡度大于0,所述坡度信息的所述最小坡度信息的斜坡坡度小于0,且所述最大坡度信息的斜坡距离小于所述最小坡度信息的斜坡距离时,判定所述目标车辆处于先上坡后下坡工况;
53、巡航规划模块还用于基于所述目标巡航车速以及预设第一系数,设定对应的目标斜坡车速;
54、巡航规划模块还用于若目标车辆在所述上坡曲线段进行行驶时,计算获得对应的巡航规划加速度,用以限制所述目标车辆的当前车速不小于所述目标斜坡车速;
55、巡航规划模块还用于若目标车辆由所述上坡曲线段驶入下坡曲线段时,所述巡航规划加速度设定为0;
56、巡航规划模块还用于当所述目标车辆在所述下坡曲线段进行滑行时,计算获得对应的所述巡航规划加速度,用以限制所述目标车辆的当前车速不大于所述目标斜坡车速。
57、优选的,所述预设第一系数大于1。
58、优选的,所述预设第二系数为小数。
59、本技术提供的技术方案带来的有益效果包括:
60、本技术基于目标车辆的车辆行驶数据以及当前路段相关信息,合理规划车速和纵向加速度,实现整车对道路信息合理利用,提升整车经济性,从而提高续航里程。
- 还没有人留言评论。精彩留言会获得点赞!