自动驾驶控制方法、装置、电子设备及存储介质与流程
本技术涉及车辆,尤其涉及一种自动驾驶控制方法、装置、电子设备及存储介质。
背景技术:
1、随着科技的不断发展,算力的持续突破,自动驾驶迅猛发展,自动驾驶可以为人们提供更安全、便捷和高效的出行方式,同时也对整个交通系统和城市规划带来了深远的影响。
2、自动驾驶系统主流的技术方案主要分为两种:基于规则分模块架构和基于数据驱动的端到端感知决策架构。虽然基于规则分模块的架构凭借算力需求低、部署简单、过程可解释等优势已经实现量产落地,但是难以实现全场景域覆盖,分模块求解的结果并不是全局最优解。端到端方案以原始传感器数据为输入,并生成规划和/或低级控制动作作为输出,可以进行联合的、全局的优化,自动驾驶决策的准确性较高。
3、然而,端到端感知决策架构的可解释性较差,无法与自动驾驶系统之间进行实时人机交互,因此在控制车辆执行突发性行为时,容易导致乘坐自动驾驶车辆的用户无法理解自动驾驶车辆的驾驶行为而产生疑惑、恐慌、不安等负面情绪,同时用户难以将自身需求在智驾域进行表现,造成用户体验感较差。
技术实现思路
1、本技术的主要目的在于提供一种自动驾驶控制方法、装置、电子设备及存储介质,旨在解决相关技术中由于没有将决策分层,仍然存在端到端感知决策方案的可解释性较差的技术问题。
2、为实现上述目的,本技术提供一种自动驾驶控制方法,所述自动驾驶控制方法采用认知决策模型,所述认知决策模型包括认知层和多个决策层,各所述决策层串联;所述自动驾驶控制方法包括以下步骤:
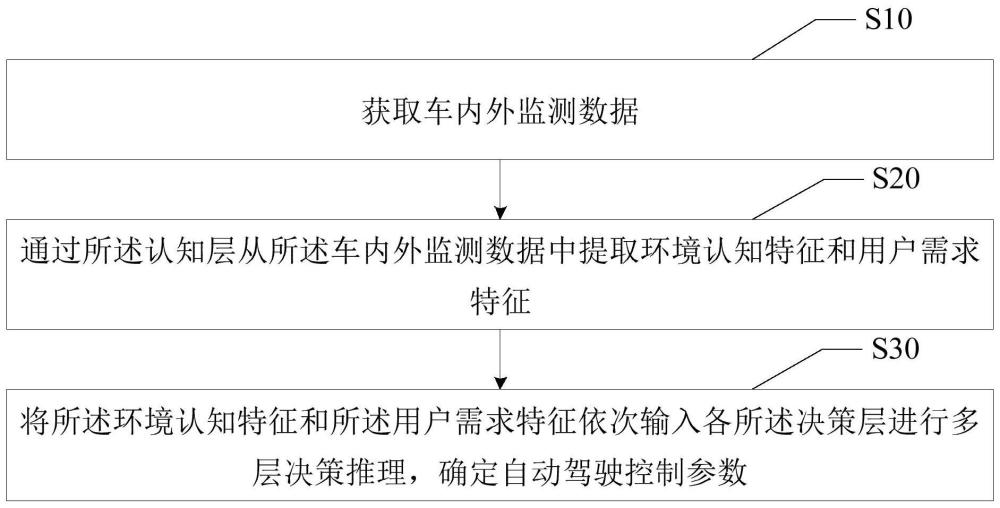
3、获取车内外监测数据;
4、通过所述认知层从所述车内外监测数据中提取环境认知特征和用户需求特征;
5、将所述环境认知特征和所述用户需求特征依次输入各所述决策层进行多层决策推理,确定自动驾驶控制参数。
6、可选地,所述决策层包括第一决策层和第二决策层;所述将所述环境认知特征和所述用户需求特征依次输入各所述决策层进行多层决策推理,确定自动驾驶控制参数的步骤包括:
7、通过所述第一决策层,基于所述环境认知特征和所述用户需求特征进行决策推理,确定待执行任务序列,其中,所述待执行任务序列包括至少一个待执行任务;
8、依次从各所述待执行任务中确定目标待执行任务,并将所述目标待执行任务输入所述第二决策层;
9、通过所述第二决策层,基于各所述目标待执行任务以及各所述目标待执行任务各自对应的环境认知特征确定自动驾驶控制参数。
10、可选地,所述通过所述第二决策层,基于各所述目标待执行任务以及各所述目标待执行任务各自对应的环境认知特征确定自动驾驶控制参数的步骤包括:
11、通过所述第二决策层,基于所述目标待执行任务以及所述环境认知特征确定自动驾驶控制参数;
12、将所述目标待执行任务确定为已执行任务;
13、获取新的车内外监测数据,并通过所述认知层从所述新的车内外监测数据中提取新的环境认知特征;
14、返回执行所述依次从各所述待执行任务中确定目标待执行任务,并将所述目标待执行任务输入所述第二决策层的步骤。
15、可选地,所述第二决策层包括推理层和解码层;所述通过所述第二决策层,基于各所述目标待执行任务以及各所述目标待执行任务各自对应的环境认知特征确定自动驾驶控制参数的步骤包括:
16、获取与各所述目标待执行任务时间匹配的环境认知特征和车辆行驶状态数据;
17、通过所述推理层,基于各所述目标待执行任务各自对应的环境认知特征确定各所述目标待执行任务各自对应的驾驶行为特征;
18、通过所述解码层,基于各所述目标待执行任务、各所述目标待执行任务各自对应的驾驶行为特征以及各自对应的车辆行驶状态数据,解码出自动驾驶控制参数。
19、可选地,所述将所述环境认知特征和所述用户需求特征依次输入各所述决策层进行多层决策推理,确定自动驾驶控制参数的步骤之后,还包括:
20、根据所述车内外监测数据和所述自动驾驶控制参数,生成驾驶行为解释;
21、输出所述驾驶行为解释。
22、可选地,所述认知层包括用户特征提取模型;所述车内外监测数据包括用户操作数据和用户状态数据;
23、通过所述认知层从所述车内外监测数据中提取用户需求特征的步骤包括:
24、通过所述用户特征提取模型从所述用户操作数据中提取用户显示需求特征,和/或,通过所述用户特征提取模型从所述用户状态数据中提取用户隐式需求特征。
25、可选地,所述认知层包括场景认知模型、地图构建模型、风险目标检测跟踪模型和运动预测模型;所述环境认知特征包括场景认知特征、地图特征、风险目标检测跟踪特征和风险目标运动特征;
26、通过所述认知层从所述车内外监测数据中提取环境认知特征的步骤包括:
27、通过所述场景认知模型从所述车内外监测数据中提取出场景认知特征,通过所述地图构建模型从所述车内外监测数据中提取出地图特征,并通过所述风险目标检测跟踪模型从所述车内外监测数据中提取出风险目标检测跟踪特征;
28、通过所述运动预测模型基于所述场景认知特征、所述地图特征和所述风险目标检测跟踪特征,进行风险目标运动预测,得到风险目标运动特征,其中,所述运动预测模型采用注意力机制。
29、本技术还提供一种自动驾驶控制装置,所述自动驾驶控制装置上部署有认知决策模型,所述认知决策模型包括认知层和多个决策层,各所述决策层串联,所述自动驾驶控制装置包括:
30、第一获取模块,用于获取车内外监测数据;
31、第一认知模块,用于通过所述认知层从所述车内外监测数据中提取环境认知特征和用户需求特征;
32、分层决策模块,用于将所述环境认知特征和所述用户需求特征依次输入各所述决策层进行多层决策推理,确定自动驾驶控制参数。
33、本技术还提供一种电子设备,所述电子设备为实体设备,所述电子设备包括:存储器、处理器以及存储在所述存储器上并可在所述处理器上运行的所述的自动驾驶控制方法的程序,所述的自动驾驶控制方法的程序被处理器执行时可实现如上述的自动驾驶控制方法的步骤。
34、本技术还提供一种存储介质,所述存储介质为计算机可读存储介质,所述计算机可读存储介质上存储有实现自动驾驶控制方法的程序,所述的自动驾驶控制方法的程序被处理器执行时实现如上述的自动驾驶控制方法的步骤。
35、本技术提供了一种自动驾驶控制方法、装置、电子设备及存储介质,所述自动驾驶控制方法采用认知决策模型,所述认知决策模型包括认知层和多个决策层,各所述决策层串联。首先,通过获取车内外监测数据,通过所述认知层从所述车内外监测数据中提取环境认知特征和用户需求特征,实现了环境认知特征和用户需求特征的提取,进而通过将所述环境认知特征和所述用户需求特征依次输入各所述决策层进行多层决策推理,确定自动驾驶控制参数,实现了融合环境认知特征和用户需求特征一同进行多层次决策推理。一方面,层层递进地实现用户需求,这一过程符合用户的逻辑推理过程,因此确定的自动驾驶控制参数更加有序和符合逻辑,更容易被用户理解;另一方面基于环境认知特征进行自动驾驶控制可以客观地作出决策,确保自动驾驶车辆的安全行驶,而确保自动驾驶车辆安全行驶的自动驾驶控制参数通常是允许在一定安全范围内波动的,例如,车速在一定范围内通过十字路口都是安全的,转弯时转弯角度在一定范围内都是不会与其他交通参与者发生碰撞的等等,因此,在此基础上,结合用户需求特征,可以从这一安全范围中进行进一步找出能够适应于用户需求的舒适性范围,由于迎合了用户需求,提高了与用户之间的交互性,自动驾驶车辆最终的驾驶行为则更容易被用户理解,从而提高了端到端感知决策架构的可解释性,减少了用户的疑惑、恐慌、不安等负面情绪,提高了用户体验感。
- 还没有人留言评论。精彩留言会获得点赞!