一种基于多传感器数据融合和增强的智能驾驶方法及系统与流程
本发明涉及智能驾驶,尤其涉及一种基于多传感器数据融合和增强的智能驾驶方法及系统。
背景技术:
1、多传感器数据融合和增强的智能驾驶是一种利用多个传感器以及相关算法和技术来提高汽车驾驶安全性、效率和舒适性的技术。它可以通过将来自不同传感器的数据进行整合和分析,提供更全面、准确和可靠的信息,从而支持智能驾驶系统做出更明智的决策和行动。
2、多传感器数据融合的首要条件是使用多种类型的传感器来获取不同的信息。常见的传感器包括摄像头、激光雷达、毫米波雷达、超声波传感器、gps和惯性测量单元(imu)等。每种传感器都可以提供独特的信息,如图像距离、速度、方向等2、数据整合:多传感器数据融合需要将来自不同传感器的数据进行整合和同步。这可以通过时间戳同步、坐标系转换、数据校准和校正等技术来实现,以确保数据的一致性和准确性。
3、相关技术中,在自动驾驶的过程中,路面状况的不同对车辆性能以及安全性的影响较大,复杂路面,如泥浆、雪地等,若不采用相对应的限滑措施,舒适性较差,且容易引起事故的发生。
技术实现思路
1、本发明实施例提供一种种基于多传感器数据融合和增强的智能驾驶方法及系统,旨在解决或者部分解决上述背景技术中存在的问题。
2、为了解决上述技术问题,本发明是这样实现的:
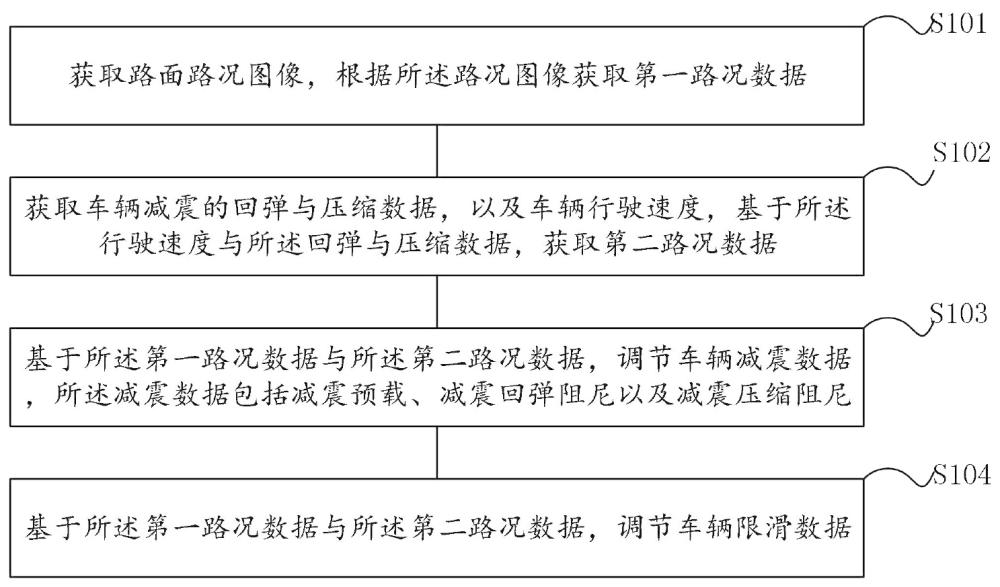
3、第一方面,本发明实施例提供了一种基于多传感器数据融合和增强的智能驾驶方法,所述方法包括:获取路面路况图像,根据所述路况图像获取第一路况数据;获取车辆减震的回弹与压缩数据,以及车辆行驶速度,基于所述行驶速度与所述回弹与压缩数据,获取第二路况数据;基于所述第一路况数据与所述第二路况数据,调节车辆减震数据,所述减震数据包括减震预载、减震回弹阻尼以及减震压缩阻尼;基于所述第一路况数据与所述第二路况数据,调节车辆限滑数据。
4、结合第一方面,在一些可行的实施方式中,获取路面路况图像,根据所述路况图像获取第一路况数据,包括:获取路面路况图像,并将路况数据与特征库中特征进行匹配;根据匹配结果,确定路况类型;根据所述路况类型,确定第一路况数据,其中,所述第一路况数据包括所述路面的平整指数。结合第一方面,在一些可行的实施方式中,获取车辆减震的回弹与压缩数据,以及车辆行驶速度,基于所述行驶速度与所述回弹与压缩数据,获取第二路况数据,包括:获取预设时间间隔t内,所述车辆减震的最大回弹量与最小回弹量;获取所述预设时间间隔t内,所述车辆的平均行驶速度v;基于所述最大回弹量与所述最小回弹量,确定第二路况数据,所述第二路况数据包括所述路面的平整指数,其中,满足:
5、;
6、其中,k为常数。
7、结合第一方面,在一些可行的实施方式中,基于所述第一路况数据与所述第二路况数据,调节车辆限滑数据,包括:基于所述平整指数与所述平整指数,确定当前路况等级;基于所述路况等级,确定车辆限滑等级;基于所述限滑等级,确定限滑数据。
8、结合第一方面,在一些可行的实施方式中,基于所述路况等级,确定车辆限滑等级,还包括:获取当前滑动数据,确定当前滑动数据是否大于预设阈值;若所述滑动数据大于预设阈值,则增加所述限滑等级。结合第一方面,在一些可行的实施方式中,,确定限滑数据,包括:基于所述限滑等级,确定当前驱动模式,其中,所述驱动模式包括前轮驱动模式,四轮驱动模式;基于所述驱动模式,确定限滑数据。
9、结合第一方面,在一些可行的实施方式中,所述基于所述驱动模式,确定限滑数据,包括:若所述驱动模式为前轮驱动模式,则获取前轮转动数据;根据所述前轮转动数据,确定当前前轮轮速差;根据当前前路轮速差,确定所述限滑数据,其中,所述限滑数据包括单侧前轮刹车介入时间与介入强度。
10、结合第一方面,在一些可行的实施方式中,所述基于所述驱动模式,确定限滑数据,还包括:若所述驱动模式为四轮驱动模式,则获取所述前路转动数据与后轮转动数据;
11、根据所述前轮转动数据与所述后轮转动数据,确定当前所述前轮轮速差,后轮轮速差以及同侧前后轮轮速差;根据当前所述前轮轮速差,所述后轮轮速差以及所述同侧前后轮轮速差,确定所述限滑数据,其中,所述限滑数据包括单侧前轮刹车介入强度,单侧后轮刹车介入强度。
12、本发明实施例第二方面提出一种基于多传感器数据融合和增强的智能驾驶系统,包括:第一获取模块,所述第一获取模块用于获取路面路况图像,根据所述路况图像获取第一路况数据;获取车辆减震的回弹与压缩数据,以及车辆行驶速度,基于所述行驶速度与所述回弹与压缩数据,获取第二路况数据;第二获取模块,所述第二获取模块用于基于所述第一路况数据与所述第二路况数据,调节车辆减震数据,所述减震数据包括减震预载、减震回弹阻尼以及减震压缩阻尼;第一调节模块,所述第一调节模块用于基于所述第一路况数据与所述第二路况数据,调节车辆限滑数据。
13、结合第二方面,在一些可行的实施方式中,还包括:
14、第三获取模块,所述第三获取模块用于获取路面路况图像,并将路况数据与特征库中特征进行匹配;第一匹配模块,所述第一匹配模块用于根据匹配结果,确定路况类型;第一确认模块,所述第一确认模块用于根据所述路况类型,确定第一路况数据,其中,所述第一路况数据包括所述路面的平整指数。
15、结合第二方面,在一些可行的实施方式中,包括:
16、第四获取模块,所述第四获取模块用于预设时间间隔t内,所述车辆减震的最大回弹量与最小回弹量;第五获取模块,所述第五获取模块用于获取所述预设时间间隔t内,所述车辆的平均行驶速度v;第二确定模块,所述第二确定模块用于基于所述最大回弹量与所述最小回弹量,确定第二路况数据,所述第二路况数据包括所述路面的平整指数,其中,满足:
17、;
18、其中,k为常数。
19、结合第二方面,在一些可行的实施方式中,包括:
20、第三确定模块,所述第三确定模块用于基于所述平整指数与所述平整指数,确定当前路况等级;第四确定模块,所述第四确定模块用于基于所述路况等级,确定车辆限滑等级;基于所述限滑等级,确定限滑数据。
21、结合第二方面,在一些可行的实施方式中,还包括:
22、第六获取模块,所述第六获取模块用于获取当前滑动数据,确定当前滑动数据是否大于预设阈值;控制模块,所述控制模块用于若所述滑动数据大于预设阈值,则增加所述限滑等级。
23、结合第二方面,在一些可行的实施方式中,包括:
24、第五确定模块,所述第五确定模块用于,基于所述限滑等级,确定当前驱动模式,其中,所述驱动模式包括前轮驱动模式,四轮驱动模式;第六确定模块,所述第六确定模块用于基于所述驱动模式,确定限滑数据。
25、结合第二方面,在一些可行的实施方式中,包括:
26、第七获取模块,所述第七获取模块用于若所述驱动模式为前轮驱动模式,则获取前轮转动数据;第七确定模块,所述第七确定模块用于根据所述前轮转动数据,确定当前前轮轮速差;第八确定模块,所述第八确定模块用于根据当前前路轮速差,确定所述限滑数据,其中,所述限滑数据包括单侧前轮刹车介入时间与介入强度。
27、结合第二方面,在一些可行的实施方式中,包括:
28、第八获取模块,所述第八获取模块用于若所述驱动模式为四轮驱动模式,则获取所述前路转动数据与后轮转动数据;第九确定模块,所述第九确定模块用于根据所述前轮转动数据与所述后轮转动数据,确定当前所述前轮轮速差,后轮轮速差以及同侧前后轮轮速差;第十确定模块,所述第十确定模块用于根据当前所述前轮轮速差,所述后轮轮速差以及所述同侧前后轮轮速差,确定所述限滑数据,其中,所述限滑数据包括单侧前轮刹车介入强度,单侧后轮刹车介入强度。
29、本发明实施例第三方面提出一种电子设备,包括处理器、通信接口、存储器和通信总线,其中,处理器,通信接口,存储器通过通信总线完成相互间的通信;
30、存储器,用于存放计算机程序;
31、处理器,用于执行存储器上所存放的程序时,实现本发明实施例第一方面提出方法步骤。
32、本发明实施例第四方面提出一种计算机可读存储介质,其上存储有计算机程序,该程序被处理器执行时实现如本发明实施例第一方面提出方法。
33、本发明实施例包括以下优点:本发明提供的一种基于多传感器数据融合和增强的智能驾驶方法及系统,首先,通过获取路面路况图像,根据所述路况图像获取第一路况数据;获取车辆减震的回弹与压缩数据,以及车辆行驶速度,基于所述行驶速度与所述回弹与压缩数据,获取第二路况数据,然后,基于所述第一路况数据与所述第二路况数据,调节车辆减震数据,所述减震数据包括减震预载、减震回弹阻尼以及减震压缩阻尼,最后,基于所述第一路况数据与所述第二路况数据,调节车辆限滑数据。本发明提供的一种基于多传感器数据融合和增强的智能驾驶方法,通过对路况的识别,并结合传感器反馈数据,提高了车辆自动驾驶过程中的舒适性与安全性。
- 还没有人留言评论。精彩留言会获得点赞!