一种用于车辆的自适应坡道辅助控制方法和系统与流程
本发明涉及一种用于车辆的自适应坡道辅助控制方法和系统,属于新能源车辆安全控制。
背景技术:
1、目前,新能源车辆不断发展,纯电动车和增程式混合动力车在汽车市场中的份额不断扩大。
2、如果车辆不具备防溜坡锁止机构,当车辆处于上坡挂前进挡爬坡起步,或者下坡挂倒挡爬坡起步,从松开制动踏板到踩油门需要一定时间,如果驾驶员操作不熟练,操作时间过长,车辆有向下溜坡的危险;当车辆在坡道驻车时,对驾驶员的操作要求高,车辆容易发生溜坡,安全性差。由于安装坡度传感器成本高,在不知道坡度的情况下,很难快速并稳定控制电机扭矩达到车辆停在坡上的目的。
3、为实现快速驻坡、防溜坡,通常采用如下方式:
4、①额外增加传感器以获取精确的坡度信息,当防溜坡功能激活时根据坡度信息计算所需的驱动扭矩,该方式的成本高;②利用扭矩控制pi调节控制方法,该方法调节时间长,后溜距离长,防溜坡性能差,尤其是在坡度比较大的工况下,安全性差;③仅通过电机控制器实现零转速pi调节控制,该方法容易导致电机堵转电流过大、电机系统温度高等故障;④仅通过后溜转速来判定自适应坡道辅助控制功能的激活,该方法有可能导致车辆出现非预期的激活,造成车辆在行驶中的抖动,降低了驾驶舒适性。
5、现有自适应坡道辅助控制功能的激活条件基于后溜时电机的后溜转速,若存在驾驶员误触等情况触发制动踏板,会导致自适应坡道辅助控制功能无法激活,若此时车辆位于坡道上制动力不足以支撑车辆驻坡时,车辆仍会后溜,导致车辆起步时的后溜距离大,防溜坡性能差。
6、基于上述情况,提出一种用于车辆的自适应坡道辅助控制方法和系统。
技术实现思路
1、本发明的目的是提供一种用于车辆的自适应坡道辅助控制方法和系统,用以解决现有的自适应坡道辅助控制功能的激活条件无法及时衔接行车制动时制动力不足以支撑车辆驻坡的情况,导致防溜坡性能不佳的问题。
2、为实现上述目的,本发明的方案包括:
3、本发明的一种用于车辆的自适应坡道辅助控制方法,当当前车辆工况状态满足激活条件时,自适应坡道辅助控制功能激活,激活条件包括车辆处于后溜状态,激活条件还包括刹车信号有效。
4、现有自适应坡道辅助控制功能的激活条件为车辆处于后溜状态,区别于现有的激活条件,本发明的自适应坡道辅助控制功能的激活条件包括当刹车信号有效但车辆处于后溜状态时,当车辆有制动力输出,但制动力不足以支撑车辆驻坡时,退出制动模式,激活自适应坡道辅助控制功能,通过自适应坡道辅助控制功能及时输出驱动力使车辆驻坡,及时衔接行车制动时制动力不足以支撑车辆驻坡的情况,可以有效减小坡道起步时车辆的后溜距离,提高防溜坡性能,提高驾驶员起步操作的安全性和舒适性。
5、进一步地,后溜状态通过如下方式判定:车辆实际挡位需求的电机旋转方向与电机实际旋转方向不一致,同时车速超过第一设定阈值且不超过设定第二阈值。
6、现有的后溜状态通过后溜转速判断,区别于现有后溜状态的判断,本发明的后溜状态通过如下方式判定:车辆实际挡位需求的电机旋转方向与电机实际旋转方向不一致,同时车速超过第一设定阈值且不超过设定第二阈值,合理设定激活后溜车速范围,既保障及时激活自适应坡道辅助控制功能,缩小车辆的后溜距离,又能保障在后溜车速太大时不激活防溜坡,避免此时激活自适应坡道辅助控制功能,导致自适应坡道辅助控制功能突然输出较大的制动力,存在安全隐患。而且,较大车速的后溜能够被驾驶员察觉,此时应当由司机做出反应妥善处置,例如通过行车制动使车辆缓缓停下。
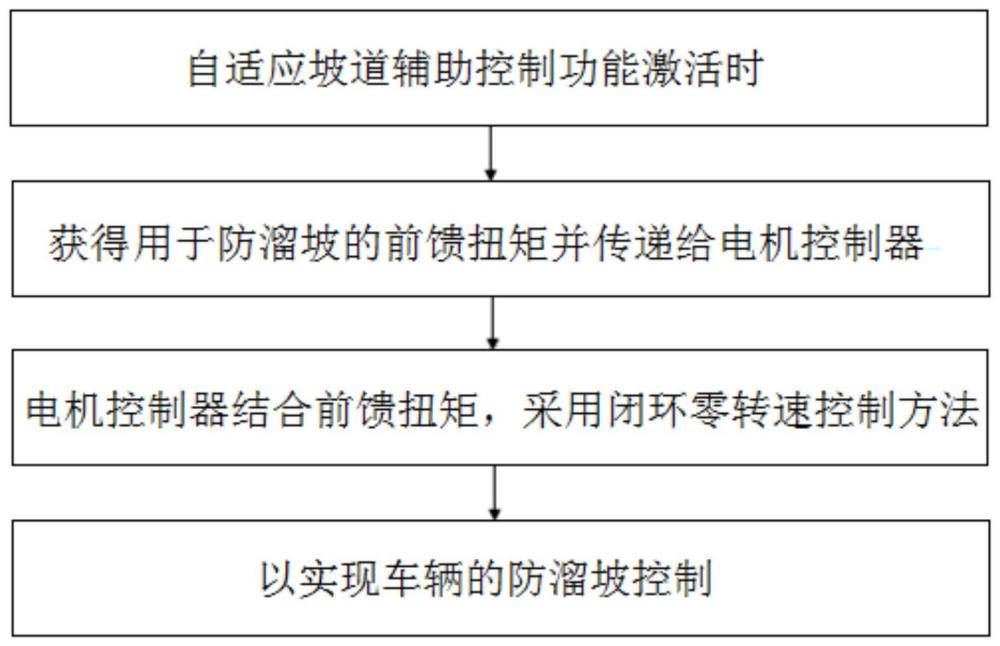
7、进一步地,当自适应坡道辅助控制功能激活时,整车控制器获得用于防溜坡的前馈扭矩并传递给电机控制器,电机控制器结合前馈扭矩,采用闭环零转速控制方法,以实现车辆的防溜坡控制。
8、本发明在自适应坡道辅助控制功能激活时,通过整车控制器和电机控制器交互协同控制,整车控制器可获取大量的整车信号,可更全面地判断整车状态和自适应坡道辅助控制功能激活条件,输出前馈扭矩;并通过电机控制器接收激活时机,控制车辆实现快速驻坡的目的,提高防溜坡性能,提升驾驶员起步操作的便利性和安全性。本发明通过整车控制器和电机控制器共同配合,避免仅由电机控制器控制,出现导致电机堵转电流过大、电机系统温度高等故障。
9、进一步地,自适应坡道辅助控制功能激活前的后溜车速超过第三设定阈值,前馈扭矩以每周期增加固定步长输出。
10、本发明将针对后溜车速设定的第三设定阈值作为前馈扭矩以每周期增加固定步长输出的决定因素,即当自适应坡道辅助控制功能激活前的后溜车速超过第三设定阈值时,前馈扭矩以每周期增加固定步长输出,避免前馈扭矩直接输出导致车辆前冲,有效提高驾驶员起步操作的安全性。其中第三设定阈值的设定可根据线下标定得到。
11、具体地,第三设定阈值大于第一设定阈值且小于第二设定阈值。更为具体地,第三设定阈值应当根据线下标定设置为一个接近第二设定阈值的值,此时前馈扭矩以每周期增加固定步长输出,能够避免前馈扭矩直接输出导致车辆较大程度地前冲,有效提高驾驶员起步操作的安全性。
12、进一步地,前馈扭矩根据自适应坡道辅助控制功能激活时的后溜车速查表得到。
13、本发明的前馈扭矩根据自适应坡道辅助控制功能激活时的后溜车速查表得到,可有效节省计算成本,并在精准数据的支撑下提高前馈扭矩获得的可靠性。
14、进一步地,自适应坡道辅助控制功能在设定时间退出后,若车辆工况状态满足激活条件,也不再激活自适应坡道辅助控制功能。
15、为避免再次激活的自适应坡道辅助控制功能与驾驶员接管车辆的控制互相影响,导致车辆出现非预期的激活,造成车辆在行驶中的抖动,降低了驾驶舒适性,本发明的自适应坡道辅助控制功能在设定时间退出后,若车辆工况状态满足激活条件,也不再激活自适应坡道辅助控制功能,不论驾驶员有没有控制车辆的动作。
16、具体地,当自适应坡道辅助控制功能正常退出(设定时间退出)后,车辆后溜的后溜车速首先进入第一设定阈值和第二设定阈值之间,此时不再激活自适应坡道辅助控制功能,避免在自适应坡道辅助控制功能退出后驾驶员接管车辆的控制与自适应坡道辅助控制功能相互影响,导致车辆出现非预期的激活,造成车辆在行驶中的抖动,降低了驾驶舒适性;而驾驶员在车辆后溜的后溜车速进入第一设定阈值和第二设定阈值之间时也没有及时接管车辆,导致车辆后溜的后溜车速超过第二设定阈值,若驾驶员开始接管车辆,进行踩油门的动作,导致车辆后溜的后溜车速再次进入第一设定阈值和第二设定阈值之间,此时车辆的工况状态虽然满足激活条件,但也不再激活自适应坡道辅助控制功能,避免出现非预期地激活自适应坡道辅助控制功能。
17、当自适应坡道辅助控制功能正常退出(设定时间退出)后,车辆后溜的后溜车速首先进入第一设定阈值和第二设定阈值之间,此时不再激活自适应坡道辅助控制功能,避免在自适应坡道辅助控制功能退出后驾驶员接管车辆的控制与自适应坡道辅助控制功能相互影响,导致车辆出现非预期的激活,造成车辆在行驶中的抖动,降低了驾驶舒适性;而驾驶员在车辆后溜的后溜车速进入第一设定阈值和第二设定阈值之间时也没有及时接管车辆,导致车辆后溜的后溜车速超过第二设定阈值,若车辆后溜至平坦道路,后溜车速逐渐降低,导致车辆后溜的后溜车速再次进入第一设定阈值和第二设定阈值之间,此时车辆的工况状态满足激活条件,但也不再激活自适应坡道辅助控制功能,避免出现非预期地激活自适应坡道辅助控制功能。
18、即在车辆再次满足激活条件时,不论驾驶员是否控制车辆,均不再激活自适应辅助功能。
19、若车辆配置有蠕行功能,松油门车辆蠕行上坡,蠕行上坡至大坡时蠕行扭矩不足以驱动车辆上坡,车辆后溜,且并未踩油门,也并未拉手刹,满足激活条件,自适应坡道辅助控制功能激活,激活后的自适应坡道辅助控制功能在设定时间后退出,车辆继续后溜,后溜至小坡时,车辆在蠕行扭矩的作用下再前进,行至大坡后再后溜,再激活自适应坡道辅助控制功能,如此反复。
20、为避免蠕行功能与自适应坡道辅助控制功能反复激活,当车辆蠕行上坡时驾驶员并未控制车辆,车辆蠕行上坡的蠕行扭矩不足以驱动车辆上坡时的车辆后溜属于激活条件中的一种情况,因此满足激活条件,自适应坡道辅助控制功能激活,激活后的自适应坡道辅助控制功能在设定时间退出后,若驾驶员没有控制车辆之前,在该时段内车辆工况状态满足激活条件,也不再激活自适应坡道辅助控制功能,避免车辆出现非预期的激活,造成车辆在行驶中的抖动,降低了驾驶舒适性;若驾驶员控制车辆时,即驾驶员存在踩油门、踩刹车或拉手刹等动作后,车辆的工况状态满足激活条件,也不再激活自适应坡道辅助控制功能,有效避免再次激活的自适应坡道辅助控制功能与驾驶员接管车辆的控制互相影响,导致车辆出现非预期的激活,造成车辆在行驶中的抖动,降低了驾驶舒适性。
21、进一步地,当车辆制动停止后的车辆工况状态首次满足激活条件,激活自适应坡道辅助控制功能。
22、本发明在有刹车信号的车辆后溜时激活自适应坡道辅助控制功能,但为了避免驾驶员(司机)长时间控制车辆(踩刹车)过程中反复满足激活条件,进而反复激活自适应坡道辅助控制功能,提醒司机利用手刹或其它驻车装置驻坡,若需要再次激活自适应坡道辅助控制功能时,需将车辆彻底踩停(制动停止),车辆彻底踩停(制动停止)后车辆工况状态首次满足激活条件才会激活自适应坡道辅助控制功能。
23、本发明在有踩油门的车辆后溜时激活自适应坡道辅助控制功能,但为了避免驾驶员长时间控制车辆(踩油门)过程中反复满足激活条件,进而反复激活自适应坡道辅助控制功能,提醒司机松油门后利用手刹或踩刹车或其它驻车装置驻坡,若需要再次激活自适应坡道辅助控制功能时,需将车辆彻底踩停(制动停止),车辆彻底踩停(制动停止)后车辆工况状态首次满足激活条件才会激活自适应坡道辅助控制功能。
24、进一步地,激活条件还包括车辆未开门。
25、因自适应坡道辅助控制功能激活时间较短,若开门状态下的自适应坡道辅助控制功能介入(激活),使得驾驶员认为车辆已被妥善制动停止后离开,导致存在安全隐患,为避免上述安全隐患的发生,本发明的激活条件还包括车辆未开门,以提高自适应坡道辅助控制方法在应用中的安全性。
26、本发明的一种用于车辆的自适应坡道辅助控制系统,包括处理器,处理器用于执行指令以实现如上述的用于车辆的自适应坡道辅助控制方法。
27、本发明的用于车辆的自适应坡道辅助控制系统,包括处理器,处理器用于执行指令以实现当当前车辆工况状态满足激活条件时,自适应坡道辅助控制功能激活。其中,现有自适应坡道辅助控制功能的激活条件为车辆处于后溜状态,区别于现有的激活条件,本发明的自适应坡道辅助控制功能的激活条件包括当刹车信号有效但车辆处于后溜状态时,当车辆有制动力输出,但制动力不足以支撑车辆驻坡时,退出制动模式,激活自适应坡道辅助控制功能,通过自适应坡道辅助控制功能及时输出驱动力使车辆驻坡,及时衔接行车制动时制动力不足以支撑车辆驻坡的情况,可以有效减小坡道起步时车辆的后溜距离,提高防溜坡性能,提高驾驶员起步操作的安全性和舒适性。
- 还没有人留言评论。精彩留言会获得点赞!