无人驾驶车辆的速度确定方法、电子设备及车辆与流程
本发明涉及人工智能,尤其涉及一种无人驾驶车辆的速度确定方法、电子设备及车辆。
背景技术:
1、在相关技术中,对无人驾驶车辆的行驶速度进行规划或确定时,通常是以预设速度或预设时长为参考因素,对全局的行驶路径进行速度规划。
2、例如,在露天矿山的场景中,为了保证无人驾驶矿卡行驶的安全性,会将预设的速度值确定为行驶路径的固定车速;或者根据行驶路径的长度以及预设的行驶时长,将计算得到整条行驶路径对应的平均速度值,并将该平均速度值确定为无人驾驶矿卡的固定车速。
3、基于现有的无人驾驶车辆的速度确定方法进行速度确定时,确定速度无法满足实际应用的需求,因此,现有方法的适用性较低。
技术实现思路
1、本发明提供一种无人驾驶车辆的速度确定方法、电子设备及车辆,用以解决现有确定无人驾驶车辆的速度的方法,适用性较低的缺陷,以提高确定无人驾驶车辆速度的方法的适用性。
2、本发明提供一种无人驾驶车辆的速度确定方法,包括:
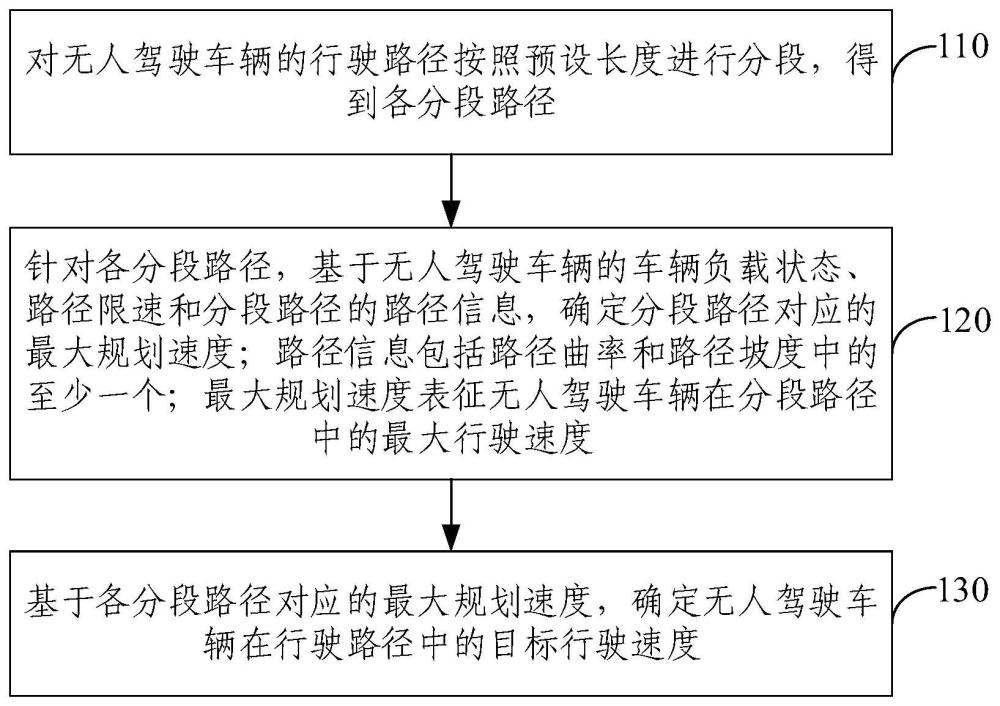
3、对无人驾驶车辆的行驶路径按照预设长度进行分段,得到各分段路径;
4、针对各所述分段路径,基于所述无人驾驶车辆的车辆负载状态、路径限速和所述分段路径的路径信息,确定所述分段路径对应的最大规划速度;所述路径信息包括路径曲率和路径坡度中的至少一个;所述最大规划速度表征所述无人驾驶车辆在所述分段路径中的最大行驶速度;
5、基于各所述分段路径对应的最大规划速度,确定所述无人驾驶车辆在所述行驶路径中的目标行驶速度。
6、根据本发明提供的一种无人驾驶车辆的速度确定方法,所述路径信息包括所述路径曲率和所述路径坡度;
7、所述基于所述无人驾驶车辆的车辆负载状态、路径限速和所述分段路径的路径信息,确定所述分段路径对应的最大规划速度,包括:
8、基于车辆负载状态和最大车速的对应关系,确定目标车辆负载状态对应的目标最大车速;
9、基于路径曲率和车速的对应关系,确定目标路径曲率对应的目标曲率车速;
10、基于路径坡度和车速的对应关系,确定目标路径坡度对应的目标坡度车速,并将所述目标坡度车速与所述目标最大车速的比值确定为车速衰减比例;
11、基于所述目标曲率车速、所述车速衰减比例和所述路径限速,确定所述分段路径对应的最大规划速度。
12、根据本发明提供的一种无人驾驶车辆的速度确定方法,所述基于各所述分段路径对应的最大规划速度,确定所述无人驾驶车辆在所述行驶路径中的目标行驶速度,包括:
13、针对各所述分段路径,基于所述分段路径对应的最大规划速度、所述目标最大车速和与所述目标最大车速对应的目标最大加速度,确定所述最大规划速度对应的最大加速度;
14、基于所述最大规划速度和所述最大规划速度对应的最大加速度,采用七段式s曲线速度规则算法对各所述分段路径的最大规划速度进行速度平滑,得到各所述分段路径对应的平滑后最大规划速度;
15、基于各所述平滑后最大规划速度确定所述无人驾驶车辆在所述行驶路径中的目标行驶速度。
16、根据本发明提供的一种无人驾驶车辆的速度确定方法,所述基于各所述平滑后最大规划速度确定所述无人驾驶车辆在所述行驶路径中的目标行驶速度,包括:
17、获取与所述行驶路径对应的平台调度时长,所述平台调度时长为指示所述无人驾驶车辆行驶完所述行驶路径的总时长;
18、基于各所述分段路径对应的平滑后最大规划速度以及各所述分段路径对应的路径长度,确定所述行驶路径对应的最短时长;
19、在所述平台调度时长大于所述最短时长的情况下,减小各所述分段路径对应的平滑后最大规划速度,得到各所述分段路径对应的调整后速度;
20、基于各所述调整后速度确定所述目标行驶速度。
21、根据本发明提供的一种无人驾驶车辆的速度确定方法,所述方法还包括:
22、基于所述平台调度时长和所述无人驾驶车辆的已行驶时长,确定剩余时长;
23、在所述剩余时长小于预测时长的情况下,在所述行驶路径中未行驶的至少一个分段路径中,按照所述分段路径对应的最大规划速度行驶;所述预测时长为预测的所述无人驾驶车辆在行驶完所述行驶路径中未行驶的所有分段路径需消耗的时长。
24、根据本发明提供的一种无人驾驶车辆的速度确定方法,所述路径信息包括路径曲率;所述方法还包括:
25、获取所述分段路径中各路径点对应的路径点曲率;
26、基于各所述路径点曲率,将所有所述路径点曲率的平均值确定为所述分段路径的平均曲率,将各所述路径点曲率中的最大值确定为所述分段路径的最大曲率;
27、基于所述平均曲率对应的第一权值、所述最大曲率对应的第二权值、所述平均曲率和所述最大曲率确定所述分段路径对应的加权曲率,并将所述加权曲率确定为所述分段路径对应的路径曲率。
28、根据本发明提供的一种无人驾驶车辆的速度确定方法,所述路径信息包括路径坡度;所述方法还包括:
29、获取所述分段路径中各路径点对应的路径点坡度;
30、基于各所述路径点坡度,将所有所述路径点坡度的平均值确定为所述分段路径的平均坡度,将各所述路径点坡度中的最大值确定为所述分段路径的最大坡度;
31、基于所述平均坡度对应的第三权值、所述最大坡度对应的第四权值、所述平均坡度和所述最大坡度确定所述分段路径对应的加权坡度,并将所述加权坡度确定为所述分段路径对应的路径坡度。
32、根据本发明提供的一种无人驾驶车辆的速度确定方法,所述方法还包括:
33、获取所述无人驾驶车辆的参考路径;
34、基于所述参考路径,对所述参考路径中待平滑路段进行路径平滑,得到平滑路径;
35、将所述平滑路径确定为所述行驶路径。
36、本发明还提供一种无人驾驶车辆的速度确定装置,包括:
37、分段模块,用于对无人驾驶车辆的行驶路径按照预设长度进行分段,得到各分段路径;
38、确定模块,用于针对各所述分段路径,基于所述无人驾驶车辆的车辆负载状态、路径限速和所述分段路径的路径信息,确定所述分段路径对应的最大规划速度;所述路径信息包括路径曲率和路径坡度中的至少一个;所述最大规划速度表征所述无人驾驶车辆在所述分段路径中的最大行驶速度;
39、所述确定模块,还用于基于各所述分段路径对应的最大规划速度,确定所述无人驾驶车辆在所述行驶路径中的目标行驶速度。
40、本发明还提供一种电子设备,包括存储器、处理器及存储在所述存储器上并可在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现如上述任一种所述无人驾驶车辆的速度确定方法。
41、本发明还提供一种非暂态计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现如上述任一种所述无人驾驶车辆的速度确定方法。
42、本发明还提供一种车辆,该车辆使用了如上述任一种所述无人驾驶车辆的速度确定方法,或者该车辆包括如上所述的电子设备。
43、本发明还提供一种计算机程序产品,包括计算机程序,所述计算机程序被处理器执行时实现如上述任一种所述无人驾驶车辆的速度确定方法。
44、本发明提供一种无人驾驶车辆的速度确定方法、电子设备及车辆,该方法通过将行驶路径进行分段,可以根据车辆的车辆负载状态、各分段路径的路径信息以及路径限速分别确定出对应于各分段路径的各最大规划速度,进一步地,可以基于各最大规划速度对行驶路径整体进行速度规划和确定,使无人驾驶车辆可以在各分段路径中以较高适配度的车速行驶,可以较好地自适应确定出无人驾驶车辆在行驶路径中的目标行驶速度,提高不同需求或不同场景下的适应能力,因此,提高了无人驾驶车辆的速度确定的适用性。
- 还没有人留言评论。精彩留言会获得点赞!