驱动装置及其可移动设备的制作方法
本技术属于可移动设备,具体涉及一种驱动装置及其可移动设备。
背景技术:
1、现有的可移动设备越来越多的采用动力电池作为能量来源。可移动设备例如但不限于新能源汽车、新能源飞行器以及新能源船舶等。
2、以新能源汽车为例,对于前驱或后驱车辆来说,其电动驱动系统包括一个动力电池,与动力电池连接的一个逆变器,以及与逆变器连接的一个驱动电机,该驱动电机用于驱动前轮或后轮,若驱动前轮则为前驱车辆,若驱动后轮则为后驱车辆;对于四驱车辆来说,其电动驱动系统包括一个动力电池,与动力电池连接的一个逆变器,以及与逆变器连接的至少两个驱动电机,至少两个驱动电机用于驱动对应的前轮、后轮,以实现四个车轮均能输出动力,以提高车辆不同路况的适应能力。
3、无论上述前驱、后驱或四驱车辆,其均是通过一个动力电池及与其连接的逆变器,向对应的驱动电机提供电能,采用此种单链能量输送链路,在此链路中无论动力电池、逆变器中的任一环节出现问题,均会导致车辆无法正常行驶,甚至会造成严重的交通事故。
技术实现思路
1、鉴于现有技术中的上述缺陷或不足,本实用新型提供一种驱动装置及其可移动设备,至少可以提高可移动设备行驶的可靠性以及安全性。
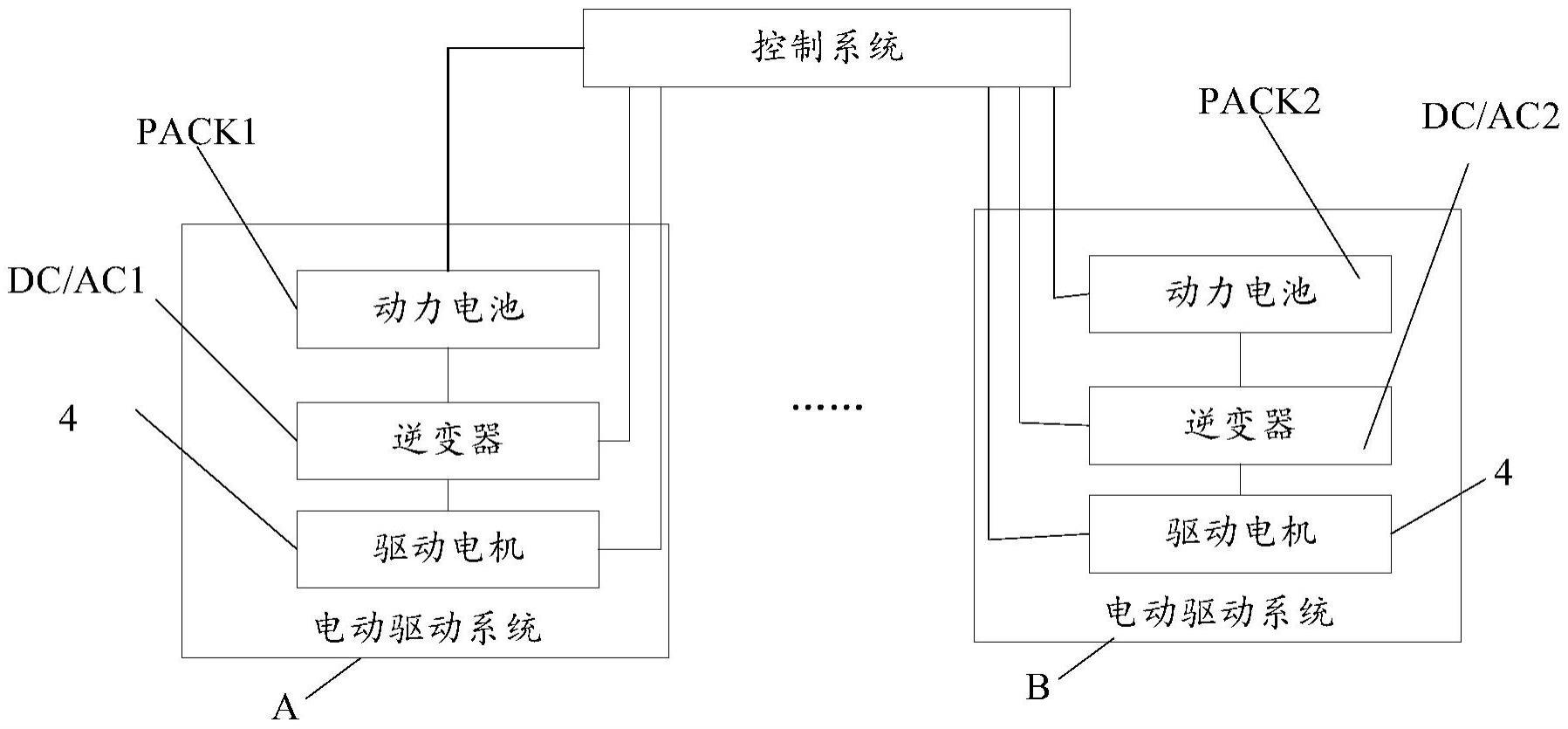
2、第一方面,本实用新型提供的一种可移动设备的驱动装置,包括至少两套相互独立的电动驱动系统(a、b),各所述电动驱动系统(a、b)配置为能独立驱动所述可移动设备行驶;
3、各所述电动驱动系统(a、b)均独立包括动力电池(pack1、pack2)、逆变器(dc/ac1、dc/ac2)以及驱动电机(4),所述逆变器dc/ac1、dc/ac2)用于从所述动力电池(pack1、pack2)获取直流电,并转化为交流电提供给所述驱动电机(4)。
4、作为可实现方式,所述可移动设备的驱动装置还包括控制系统,所述控制系统分别与各所述电动驱动系统(a、b)的所述动力电池(pack1、pack2)、所述逆变器(dc/ac1、dc/ac2)以及所述驱动电机(4)电连接,用于独立控制各所述电动驱动系统(a、b)的所述动力电池(pack1、pack2)、所述逆变器(dc/ac1、dc/ac2)以及所述驱动电机(4)。
5、作为可实现方式,所述控制系统包括检测单元和控制单元;
6、所述检测单元用于获取各所述电动驱动系统(a、b)的运行参数;
7、所述控制单元用于根据所述运行参数确定对应所述电动驱动系统(a、b)是否故障,若故障则关闭对应的所述电动驱动系统(a、b)。
8、作为可实现方式,所述运行参数包括所述动力电池(pack1、pack2)的实时电压、实时放电电流、实时绝缘电阻以及实时温度中的至少任一;所述控制单元用于根据所述运行参数确定对应的所述电动驱动系统(a、b)是否出现故障,若故障,则关闭对应的动力电池(pack1、pack2);和/或,
9、所述运行参数包括所述逆变器(dc/ac1、dc/ac2)预定时间段内输出的三相电流的当前变化率,所述控制单元用于根据所述当前变化率确定所述电动驱动系统(a、b)是否出现故障,若故障,则关闭对应的逆变器(dc/ac1、dc/ac2);和/或,
10、所述运行参数包括所述驱动电机(4)的实时电压、实时工作电流以及实时温度中的至少任一,所述控制单元用于根据所述驱动电机(4)的实时电压、实时工作电流以及实时温度中的至少任一,确定对应的所述电动驱动系统(a、b)是否出现故障,若故障,则关闭对应的驱动电机(4)。
11、作为可实现方式,在通过所述动力电池(pack1、pack2)确定对应的所述电动驱动系统(a、b)是否出现故障时,
12、所述控制单元用于根据所述动力电池(pack1、pack2)的实时电压确定所述动力电池(pack1、pack2)是否过压或欠压,若过压或欠压,则确定对应的所述电动驱动系统(a、b)出现故障;或者,
13、所述控制单元用于根据所述动力电池(pack1、pack2)的实时放电电流确定所述动力电池(pack1、pack2)是否过流、过载或短路,若过流、过载或短路,则确定对应的所述电动驱动系统(a、b)出现故障;或者,
14、所述控制单元用于根据所述动力电池(pack1、pack2)的实时绝缘电阻确定所述动力电池(pack1、pack2)是否漏电,若漏电,则确定对应的所述电动驱动系统(a、b)出现故障;或者,
15、所述控制单元用于根据所述动力电池(pack1、pack2)的实时温度确定所述动力电池(pack1、pack2)是否高于第一温度阈值或低于第二温度阈值,所述第一温度阈值高于所述第二温度阈值,若高于所述第一温度阈值或低于所述第二温度阈值,则确定对应的所述电动驱动系统(a、b)出现故障。
16、作为可实现方式,在通过所述逆变器(dc/ac1、dc/ac2)确定对应的所述电动驱动系统(a、b)是否出现故障时,
17、所述检测单元用于周期性采集所述逆变器(dc/ac1、dc/ac2)输出的三相电流;
18、所述控制单元用于将所述三相电流由三相静止坐标系变换到两相静止坐标系,分别在所述两相静止坐标系下,以各周期起始时刻和终止时刻的电流确定电流轨迹的斜率,并根据所述电流轨迹的斜率是否为定值,确定所述电动驱动系统(a、b)是否出现故障。
19、作为可实现方式,所述控制单元用于根据以下关系式确定所述电流轨迹的斜率是否为定值:
20、
21、
22、
23、其中,ia为所述三相电流中a相电流在所述三相静止坐标系中的电流值,ib为所述三相电流中b相电流在所述三相静止坐标系中的电流值,ic为所述三相电流中c相电流在所述三相静止坐标系中的电流值,iα为所述两相静止坐标系α轴的电流值,iβ为所述两相静止坐标系β轴的电流值,k为一周期的终止时刻,k-1为一周期的起始时刻,为所述电流轨迹的斜率。
24、作为可实现方式,作为可实现方式,在通过所述驱动电机(4)确定对应的所述电动驱动系统(a、b)是否出现故障时,
25、所述控制单元用于判断所述驱动电机(4)的实时电压是否大于电压阈值,若是,则确定对应的所述电动驱动系统(a、b)出现故障;或者,
26、所述控制单元用于判断所述驱动电机(4)的实时工作电流是否大于第一电流阈值或是否小于第二电流阈值,所述第一电流阈值大于所述第二电流阈值,若是,则确定对应的所述电动驱动系统(a、b)出现故障;或者,
27、所述控制单元用于判断所述驱动电机(4)的实时温度确定所述动力电池(pack1、pack2)是否高于第三温阈值,若是,则确定对应的所述电动驱动系统(a、b)出现故障。
28、作为可实现方式,所述控制系统还用于响应于驱动模式切换请求,控制部分所述电动驱动系统或全部电动驱动系统工作,以驱动所述可移动设备行驶。
29、作为可实现方式,所述可移动设备的驱动装置包括两套相互独立的所述电动驱动系统(a、b),各套所述电动驱动系统(a、b)均包括一一对应连接的所述动力电池(pack1、pack2)、所述逆变器(dc/ac1、dc/ac2)以及所述驱动电机(4);其中一套所述电动驱动系统(a、b)的驱动电机(4)通过第一差速器(3)与所述可移动设备的两个前轮(1)传动连接,另一套所述电动驱动系统(a、b)的驱动电机(4)通过第二差速器(5)与所述可移动设备的两个后轮(2)传动连接。
30、作为可实现方式,所述可移动设备的驱动装置作为可实现方式,所述可移动设备的驱动装置包括两套相互独立的所述电动驱动系统(a、b),各套所述电动驱动系统(a、b)均包括一个所述动力电池(pack1、pack2)、一个所述逆变器(dc/ac1、dc/ac2)以及两个所述驱动电机(4),各所述驱动电机(4)用于一一对应的驱动所述可移动设备的车轮。
31、作为可实现方式,所述可移动设备的驱动装置包括两套相互独立的所述电动驱动系统(a、b),各套所述电动驱动系统(a、b)均包括一个所述动力电池(pack1、pack2)、两个所述逆变器(dc/ac1、dc/ac2、dc/ac3、dc/ac4)以及两个所述驱动电机(4),各所述逆变器(dc/ac1、dc/ac2、dc/ac3、dc/ac4)与对应驱动电机(4)一一对应连接,各所述驱动电机(4)用于一一对应的驱动所述可移动设备的车轮。
32、作为可实现方式,所述可移动设备的驱动装置包括两套相互独立的所述电动驱动系统(a、b);
33、其中一套所述电动驱动系统(a、b)包括一一对应连接的所述动力电池(pack1、pack2)、所述逆变器(dc/ac1、dc/ac2)以及所述驱动电机(4);且该套所述电动驱动系统(a、b)的驱动电机(4)通过差速器与所述可移动设备的后轮(2)或前轮(1)传动连接;
34、另外一套所述电动驱动系统(a、b)包括一个所述动力电池(pack1、pack2)、两个所述逆变器(dc/ac1、dc/ac3或dc/ac2、dc/ac4)以及两个所述驱动电机(4),所述逆变器(dc/ac1、dc/ac2、dc/ac3、dc/ac4)与所述驱动电机(4)一一对应连接,各所述驱动电机(4)用于一一对应的驱动所述可移动设备的另外两个车轮;或者,
35、另外一套所述电动驱动系统(a、b包括一个所述动力电池(pack1、pack2)、一个所述逆变器(dc/ac1、dc/ac2、dc/ac3、dc/ac4)以及两个所述驱动电机(4),各所述驱动电机(4)用于一一对应的驱动所述可移动设备的另外两个车轮。
36、作为可实现方式,所述电动驱动系统的套数与所述可移动设备的车轮数相等,各所述电动驱动系统均包括一一对应连接的所述动力电池、所述逆变器以及所述驱动电机(4),各所述电动驱动系统的所述驱动电机(4)用于一一对应的驱动所述车轮。
37、第二方面,本实用新型提供一种可移动设备,包括装置主体,所述装置主体上固定连接有上述的驱动装置。
38、作为可实现方式,所述可移动设备包括一个电池壳体,各所述电动驱动系统(a、b)的各所述动力电池(pack1、pack2)位于同一所述电池壳体内;或者,
39、所述可移动设备包括两个以上电池壳体,各所述电动驱动系统(a、b)的各所述动力电池(pack1、pack2)一一对应的位于各所述电池壳体内。
40、作为可实现方式,各所述电动驱动系统(a、b)的各所述动力电池(pack1、pack2)的电池容量相同或不同。
41、作为可实现方式,至少任一所述动力电池(pack1、pack2)与所述装置主体可拆卸连接。
42、上述方案,设置至少两套相互独立的电动驱动系统;每一电动驱动系统可以单独的运行,两套以上电动驱动系统还可以协同的运行,例如,在其中一套电动驱动系统处于工作状态时,其他电动驱动系统处于待机状态,在工作状态的电动驱动系统出现故障时,可以将至少一套待机状态的电动驱动系统转为工作状态,因此,提高了可移动设备行驶的可靠性以及安全性。
43、此外,在两套以上电动驱动系统协同运行时,可以提高可移动设备的恶劣工况的适应能力;例如但不限于,可移动设备为新能源汽车时,可以提高新能源汽车的脱困能力以及复杂路况的适应能力;可移动设备为新能源飞行器时,可以提高新能源飞行器恶劣气象条件下的飞行可靠性;可移动设备为新能源船舶时,可以提高新能源船舶的脱困能力,避免搁浅等。
- 还没有人留言评论。精彩留言会获得点赞!