一种超大地下连续墙钢筋笼运输装置的制作方法
本发明属于建筑施工,特别涉及一种超大地下连续墙钢筋笼运输装置。
背景技术:
1、地下连续墙施工中钢筋笼的制作与吊放是至关重要的一环,然而一些超大型钢筋笼无法在现场制作,需要在在厂家制作完成后运输到施工现场,但是对于超大型钢筋笼一般运输车辆无法满足要求,需要特定的运输装置来保障钢筋笼稳定安全的运输到施工现场。
2、基于此,公开号为cn211568026u的中国专利公开了钢筋笼运输车,当钢筋笼装车完毕后,由人力或机械牵动钢筋笼运输车移动,只适用于短距离的运输,并且在运输时,钢筋笼处于水平状态,因此,需要的运输车较长,在施工工转向过程较为困难。再比如公开号为cn207631100u的中国专利公开了一种钢筋笼运输托架,可将多个托架放置在板式货车上,然后利用板式货车运输钢筋笼,但是在该方案中,还是将钢筋笼横向放置在货车上,对车辆的长度要求较高。因此,对于超大型钢筋笼需要特定的运输装置来保障钢筋笼稳定安全的运输到施工现场。
技术实现思路
1、本发明的目的在于克服现有技术中存在的缺陷,提供一种超大地下连续墙钢筋笼运输装置。
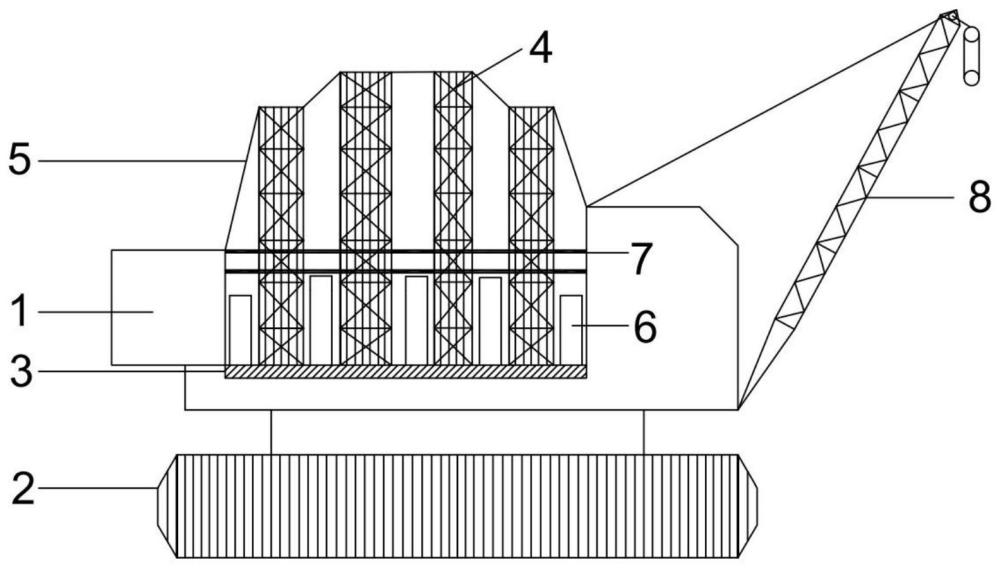
2、本发明提供了一种超大地下连续墙钢筋笼运输装置,包括行驶机构、以及设置在行驶机构上的控制装置;所述行驶机构至少包括驱动轮、车厢和车头;所述车厢内部设置有若干个并排设置的承重板,相邻两个承重板之间通过隔板隔开;
3、所述承重板上设置有若干个滑动升降柱,每个所述滑动升降柱分别通过滑动机构与所述承重板滑动连接,相邻两个所述滑动升降柱用于夹紧放置在所述承重板上的钢筋笼;
4、所述滑动升降柱两侧表面装配有红外线激光校准器和伸缩推杆;
5、所述控制装置与所述滑动升降柱信号连接,所述控制装置实时获取第一参数,所述第一参数对应于第一控制机制,所述控制装置发送第一控制指令驱动滑动升降柱以调整滑动升降柱的高度;以及
6、所述控制装置与所述滑动机构信号连接,所述控制装置实时获取第二参数,所述第二参数对应于第二控制机制,所述控制装置发送第二控制指令驱动滑动机构以调整相邻两个滑动升降柱的间距;以及
7、所述控制装置与所述伸缩推杆信号连接,所述控制装置实时获取第三参数,所述第三参数对应于第三控制机制,所述控制装置发送第三控制指令驱动伸缩推杆以调整钢筋笼姿态;
8、所述第一参数为承重板所受到的垂直载荷,所述第二参数为滑动升降柱的一侧受到钢筋笼的水平反作用力。
9、进一步的方案为,所述滑动机构位于所述承重板和车厢之间,所述滑动机构包括主轴和若干个从动齿轮,所述主轴通过主轴支架固定在所述车厢上;
10、主轴的一端设置主轴电机,用于驱动所述主轴转动,所述主轴与所述主轴电机轴性连接;所述主轴上套设有若干个从动短轴,所述从动短轴与所述主轴过盈配合连接,从动短轴随所述主轴转动;
11、所述从动短轴外侧套设有同步短轴,所述从动短轴的外表面开设有销槽,所述同步短轴内表面设置有销键,所述销键与所述销槽滑动连接,以使得所述同步短轴随所述从动短轴转动的同时沿从动短轴滑动;
12、所述从动短轴的一侧还设置有主动齿轮,所述主动齿轮通过轴承套设在所述主轴上,所述同步短轴靠近所述主动齿轮的一侧开设有凹槽,所述主动齿轮的侧面设置有凸块;
13、所述同步短轴的外表面嵌入式设置有拨动插套,所述拨动插套与所述同步转轴转动连接,拨动插套上设置有连杆,用于在外力作用下拉动所述同步短轴在所述从动短轴上滑动,以使得所述凹槽与凸块卡接,以实现所述主动齿轮随所述主轴转动;
14、所述从动齿轮位于所述主动齿轮的一侧且与所述主动齿轮啮合连接,所述从动齿轮的轴心位置设置有丝杠,所述丝杠与所述从动齿轮固定连接;
15、所述丝杠上设置有滑块,所述滑块与所述丝杠啮合连接,所述滑动升降柱位于所述滑块顶部且与滑块固定连接;
16、所述承重板中心开设有条形孔,所述滑动升降柱贯穿所述条形孔。
17、进一步的方案为,所述滑块两侧设置有固定耳,所述滑块底部设置有滑动板,所述滑动板上开设有导轨,所述固定耳与所述导轨滑动连接;
18、所述滑动板与所述车厢固定连接。
19、进一步的方案为,所述承重板上设置有若干个垂直载荷传感器,所述垂直载荷传感器与所述控制装置连接,用于获取所述承重板来自钢筋笼的垂直载荷并将垂直载荷信息发送至所述控制装置;
20、所述滑动升降柱的侧面设置有反作用力传感器,所述反作用力传感器与所述控制装置连接,用于获取所述滑动升降柱来自钢筋笼的水平反作用力并将水平反作用力信息发送至所述控制装置。
21、进一步的方案为,所述控制装置包括控制器,所述控制器与所述主轴电机连接,用于控制所述主轴电机的转速、转向和启停;所述控制器与滑动升降柱连接,用于控制所述滑动升降柱的升降高度。
22、进一步的方案为,所述控制器分别与所述滑动升降柱和垂直载荷传感器信号连接,所述控制器实时获取垂直载荷传感器的检测数值,且不同的检测数值所在的区间对应不同的升降高度,所述控制器发送第一控制指令驱动滑动升降柱以调整滑动升降柱的高度。
23、进一步的方案为,所述控制器分别与所述主轴电机和反作用力传感器信号连接,所述控制器实时获取反作用力传感器的检测结果,所述检测结果对应于第二控制机制,所述控制器发送第二控制指令驱动主轴电机的转速、转向和启停,配合外力作用下拉动不同的连杆以调整每个滑动升降柱的位置,以使得相邻两个所述滑动升降柱位于钢筋笼的两侧且紧贴于钢筋笼。
24、进一步的方案为,所述控制器分别与所述红外线激光校准器和伸缩推杆信号连接,所述控制器实时获取红外线激光校准器的检测结果,所述检测结果对应于第三控制机制,所述控制器发送第三控制指令驱动伸缩推杆推出或收回,以调整钢筋笼姿态。
25、进一步的方案为,所述垂直载荷传感器和反作用力传感器均为压力传感器。
26、进一步的方案为,所述车厢尾部设置有施重块,在钢筋笼放置完成后,所述施重块与车头之间设置至少两根钢筋,所述钢筋横向贯穿所述钢筋笼;
27、所述施重块与车头顶部连接有钢丝绳,在钢筋笼放置完成后,所述钢丝绳对所述钢筋笼顶部进行捆绑固定。
28、与现有技术相比,本发明的有益效果在于:本发明通过在车厢内部设置承重板,可将钢筋笼垂直放置在承重板上,将钢筋笼竖直放置在承重板上,为了避免钢筋笼在运输过程中发生倾斜,可通过调节滑动升降柱的位置和高度,对钢筋笼的底部起到限位作用。其中,滑动升降柱的位置和高度可以通过控制装置进行控制,具体的,控制器分别与所述滑动升降柱和垂直载荷传感器信号连接,所述控制器实时获取垂直载荷传感器的检测数值,且不同的检测数值所在的区间对应不同的升降高度,所述控制器发送第一控制指令驱动滑动升降柱以调整滑动升降柱的高度;控制器分别与所述主轴电机和反作用力传感器信号连接,所述控制器实时获取反作用力传感器的检测结果,所述检测结果对应于第二控制机制,所述控制器发送第二控制指令驱动主轴电机的转速、转向和启停,配合外力作用下拉动不同的连杆以调整每个滑动升降柱的位置,以使得相邻两个所述滑动升降柱位于钢筋笼的两侧且紧贴于钢筋笼,控制器分别与所述红外线激光校准器和伸缩推杆信号连接,所述控制器实时获取红外线激光校准器的检测结果,所述检测结果对应于第三控制机制,所述控制器发送第三控制指令驱动伸缩推杆推出或收回,以调整钢筋笼姿态,本发明通过调节伸缩推杆来达到对钢筋笼姿态的实时控制,调整精准度。
- 还没有人留言评论。精彩留言会获得点赞!