本技术涉及车辆,特别涉及一种车辆的防追尾方法及装置。
背景技术:
1、相关技术中,在车辆行驶时,可以通过雷达或者视觉传感器获取车辆与前方障碍物的距离,当车辆与前方障碍物的距离在安全距离范围时,计算避撞时间,并比较避撞时间是否大于碰撞时间,若是,则执行避撞操作,从而避免车辆与前方障碍物发生碰撞。
2、然而,相关技术中,通过雷达或者视觉传感器获取车辆与前方障碍物的距离,从而在距离过低时进行制动,但是车辆仅能检测近距离内的前方障碍物,造成车辆的识别范围具有局限性,适用性较低,容易造成车辆追尾,降低了车辆的安全性和智能性,无法满足用户的安全需求,亟待解决。
技术实现思路
1、本技术提供一种车辆的防追尾方法及装置,以解决通过雷达或者视觉传感器获取车辆与前方障碍物的距离,造成车辆的识别范围具有局限性,适用性较低,并且无法提前获取到前方危险车辆,降低了车辆的安全性和可靠性,无法满足用户的驾乘需求的问题。
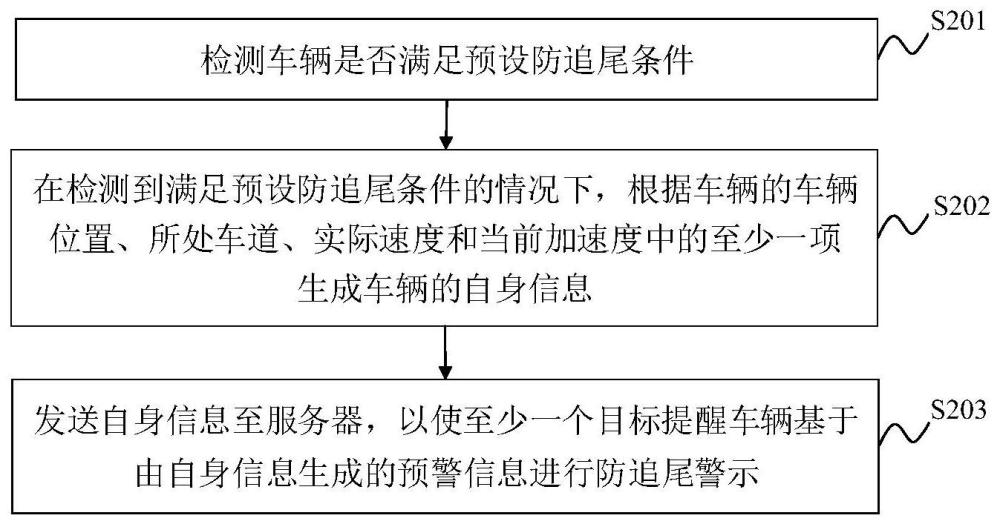
2、本技术第一方面实施例提供一种车辆的防追尾方法,应用于车辆,包括以下步骤:检测车辆是否满足预设防追尾条件;在检测到满足所述预设防追尾条件的情况下,根据所述车辆的车辆位置、所处车道、实际速度和当前加速度中的至少一项生成所述车辆的自身信息;发送所述自身信息至服务器,以使至少一个目标提醒车辆基于由所述自身信息生成的预警信息进行防追尾警示。
3、通过上述技术方案,能够将车辆的自身信息发送至服务器,通过服务器将自身信息生成预警信息,并将预警信息发送至目标提醒车辆,使得目标提醒车辆提前变道,提升了车辆的安全性和可靠性,有效的满足用户的驾乘需求。
4、可选地,在本技术的一个实施例中,本技术实施例的方法还包括:接收所述服务器基于其他车辆的自身信息发送的预警信息;根据所述预警信息确定与所述其他车辆之间的报警等级;根据所述报警等级匹配对应的目标报警方式,并按照所述目标报警方式对驾驶员进行防追尾警示。
5、通过上述技术方案,能够根据预警信息确定报警等级,从而通过对应的报警方式对驾驶员进行防追尾提醒,有效的提升了车辆的交互性。
6、可选地,在本技术的一个实施例中,所述根据所述预警信息确定与所述其他车辆之间的报警等级,包括:根据所述预警信息获取所述其他车辆的所处车道;判断所述其他车辆的所处车道和所述车辆的当前所处车道是否为同一车道;若为同一车道,则所述报警等级为二级报警等级,否则为一级报警等级,其中,所述二级报警等级的危险级别高于所述一级报警等级的危险级别。
7、通过上述技术方案,能够根据车辆与其他车辆是否处于同一车道确定对应的报警等级,有效的提升了车辆的安全性和可靠性。
8、可选地,在本技术的一个实施例中,本技术实施例的方法还包括:根据所述预警信息判断所述车辆是否满足预设换道条件;如果满足所述预设换道条件,则根据所述预警信息生成所述车辆的目标换道动作,并执行所述目标换道动作,以与所述其他车辆处于不同车道。
9、通过上述技术方案,能够在车辆满足换道条件时执行目标换道动作,有效的提升了车辆的安全性,并且提升用户的驾乘体验。
10、可选地,在本技术的一个实施例中,所述预设防追尾条件包括:所述实际速度小于或等于预设安全车速,且所述车辆位置处于高速路段。
11、通过上述技术方案,能够在车辆满足防追尾条件时进行预警提示,有效的提升车辆防追尾的可执行性。
12、本技术第二方面实施例提供一种车辆的防追尾方法,应用于服务器,该方法包括以下步骤:接收车辆在满足预设防追尾条件时发送的自身信息;根据所述自身信息的车辆位置、所处车道、实际速度和/或当前加速度确定至少一个目标提醒车辆;根据所述自身信息生成所述车辆的预警信息,并将所述预警信息发送至所述至少一个目标提醒车辆,以使所述至少一个目标提醒车辆基于所述预警信息进行防追尾警示。
13、通过上述技术方案,能够接收车辆在满足防止追尾条件时发送的自身信息,生成车辆的预警信息,并将预警信息发送至目标提醒车辆,以使目标提醒车辆基于预警信息进行防追尾警示,提升了车辆的安全性和可靠性。
14、本技术第三方面实施例提供一种车辆的防追尾装置,应用于车辆,该装置包括:检测模块,用于检测车辆是否满足预设防追尾条件;生成模块,用于在检测到满足所述预设防追尾条件的情况下,根据所述车辆的车辆位置、所处车道、实际速度和当前加速度中的至少一项生成所述车辆的自身信息;第一发送模块,用于发送所述自身信息至服务器,以使至少一个目标提醒车辆基于由所述自身信息生成的预警信息进行防追尾警示。
15、通过上述技术方案,车辆的防追尾装置能够将车辆的自身信息发送至服务器,通过服务器将自身信息生成预警信息,并将预警信息发送至目标提醒车辆,使得目标提醒车辆提前变道,提升了车辆的安全性和可靠性,有效的满足用户的驾乘需求。
16、可选地,在本技术的一个实施例中,本技术实施例的装置还包括:接收模块,用于接收所述服务器基于其他车辆的自身信息发送的预警信息;确定模块,用于根据所述预警信息确定与所述其他车辆之间的报警等级;预警模块,用于根据所述报警等级匹配对应的目标报警方式,并按照所述目标报警方式对驾驶员进行防追尾警示。
17、通过上述技术方案,车辆的防追尾装置能够根据预警信息确定报警等级,从而通过对应的报警方式对驾驶员将进行防追尾提醒,有效的提升了车辆的交互性。
18、可选地,在本技术的一个实施例中,所述确定模块包括:获取单元,用于根据所述预警信息获取所述其他车辆的所处车道;判断单元,用于判断所述其他车辆的所处车道和所述车辆的当前所处车道是否为同一车道;处理单元,用于若为同一车道,则所述报警等级为二级报警等级,否则为一级报警等级,其中,所述二级报警等级的危险级别高于所述一级报警等级的危险级别。
19、通过上述技术方案,确定模块能够根据车辆与其他车辆是否处于同一车道确定对应的报警等级,有效的提升了车辆的安全性和可靠性。
20、可选地,在本技术的一个实施例中,本技术实施例的装置还包括:判断模块,用于根据所述预警信息判断所述车辆是否满足预设换道条件;处理模块,用于如果满足所述预设换道条件,则根据所述预警信息生成所述车辆的目标换道动作,并执行所述目标换道动作,以与所述其他车辆处于不同车道。
21、通过上述技术方案,车辆的防追尾装置能够在车辆满足换道条件时执行目标换道动作,有效的提升了车辆的安全性,并且提升用户的驾乘体验。
22、可选地,在本技术的一个实施例中,所述预设防追尾条件包括:所述实际速度小于或等于预设安全车速,且所述车辆位置处于高速路段。
23、通过上述技术方案,车辆的防追尾装置能够在车辆满足防追尾条件时进行预警提示,有效的提升车辆防追尾的可执行性。
24、本技术第四方面实施例提供一种服务器,该服务器包括:接收模块,用于接收车辆在满足预设防追尾条件时发送的自身信息;确定模块,用于根据所述自身信息的车辆位置、所处车道、实际速度和/或当前加速度确定至少一个目标提醒车辆;第二发送模块,用于根据所述自身信息生成所述车辆的预警信息,并将所述预警信息发送至所述至少一个目标提醒车辆,以使所述至少一个目标提醒车辆基于所述预警信息进行防追尾警示。
25、通过上述技术方案,服务器能够接收车辆在满足防止追尾条件时发送的自身信息,生成车辆的预警信息,并将预警信息发送至目标提醒车辆,以使目标提醒车辆基于预警信息进行防追尾警示,提升了车辆的安全性和可靠性。
26、本技术第五方面实施例提供一种车辆,包括:存储器、处理器及存储在所述存储器上并可在所述处理器上运行的计算机程序,所述处理器执行所述程序,以实现如上述实施例所述的车辆的防追尾方法。
27、本技术第六方面实施例提供一种计算机可读存储介质,所述计算机可读存储介质存储计算机程序,该程序被处理器执行时实现如上的车辆的防追尾方法。
28、本技术实施例可以在检测到车辆满足防追尾条件的情况下,根据车辆的车辆位置、所处车道、实际速度和当前加速度中的至少一项生成车辆的自身信息,发送自身信息至服务器,以使目标提醒车辆基于由自身信息生成的预警信息进行防追尾警示,使得车辆可以提前获取到前方危险车辆,增加了车辆对前方障碍物的识别范围,提升了车辆的安全性和智能性。由此,解决了相关技术中通过雷达或者视觉传感器获取车辆与前方障碍物的距离,从而在距离过低时进行制动,但是车辆仅能检测近距离内的前方障碍物,造成车辆的识别范围具有局限性,适用性较低,容易造成车辆追尾,降低了车辆的安全性和智能性,无法满足用户的安全需求的问题。
29、本技术附加的方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本技术的实践了解到。