基于高阶全驱系统方法的车辆主动悬架自适应控制方法
本发明属于车辆主动悬架控制,特别涉及一种基于高阶全驱系统方法的车辆主动悬架自适应控制方法。
背景技术:
1、车辆的舒适性、经济性和安全性是目前车辆研究领域中广泛关注的研究问题。车辆上路的前提,首先需要保证的是车辆行驶的安全性,在车辆安全性得到充分保证后将进一步要求车辆具有较好的经济性。目前在大量研究人员的研究背景下,车辆的安全性和经济性已经得到了较为充分的保证,也相应的提出了大量的控制算法来保证车辆行驶过程中的安全性和经济性。随着智能车辆技术的发展,车辆的舒适性也受到了广泛的关注,特别是自动驾驶车辆技术的成熟,由于自动驾驶车辆中驾驶员角色将转变为乘员角色,乘员将在车内进行一系列的非驾驶任务,所以自动驾驶车辆想要得到推广应用,其舒适性需要得到有效保证。在车辆的横-纵向运动方向,车辆的频繁启停、急速转弯以及急加减速等不良驾驶现象将直接影响车辆的舒适性;在车辆的垂直运动方向,路面不平度、车辆悬架作动效果以及车辆特性等将直接影响车辆行驶的舒适性。但是一般学者均将车辆的横-纵向与垂向解耦进行研究,在悬架控制领域目前已经取得了较大的发展,目前已经由传统的被动悬架逐渐发展为半主动悬架甚至主动悬架,由于应用成本和技术要求较高,主动悬架的应用并不广泛,仍然处于研究开发阶段,主动悬架基于其良好的作用效果将会有较好的发展应用前景。
2、主动悬架作为目前智能车辆隔振的主要部件,对车辆行驶的舒适性有很大的影响。目前在前人的研究中,主动悬架的控制问题已经通过各种算法得到了有效的解决。主动悬架控制问题一般视为一类非线性问题进行解决,有学者提出了基于模型的模型预测控制,最优控制以及天棚地棚等控制算法进一步控制悬架的执行器作用,这些算法的应用有效的降低了垂向加速度的峰值,提高了车辆的舒适性。但是前人提出的一系列控制算法均是基于状态-空间表达形式后进一步设计相应的控制器。根据段广仁院士提出的全驱控制理论,本发明中提出面向控制模型直接设计自适应控制器的主动悬架控制方法,通过仿真对比,验证了基于全驱理论设计的主动悬架控制的方法的有效性。目前在高阶全驱控制领域并没有在主动悬架控制方面开展类似的工作。
技术实现思路
1、针对现有技术的不足,本发明提供了一种基于高阶全驱系统方法的车辆主动悬架自适应控制方法,本发明提出的方法不再基于状态空间模型进行分析和设计控制器,而是基于物理模型直接进行控制器设计,简化控制器设计过程,并通过仿真验证证明本方法能够在有限时域内稳定快速稳定,实际应用效果较好。
2、为实现上述目的,本发明公开了如下技术方案:
3、一种基于高阶全驱系统方法的车辆主动悬架自适应控制方法,其包括:
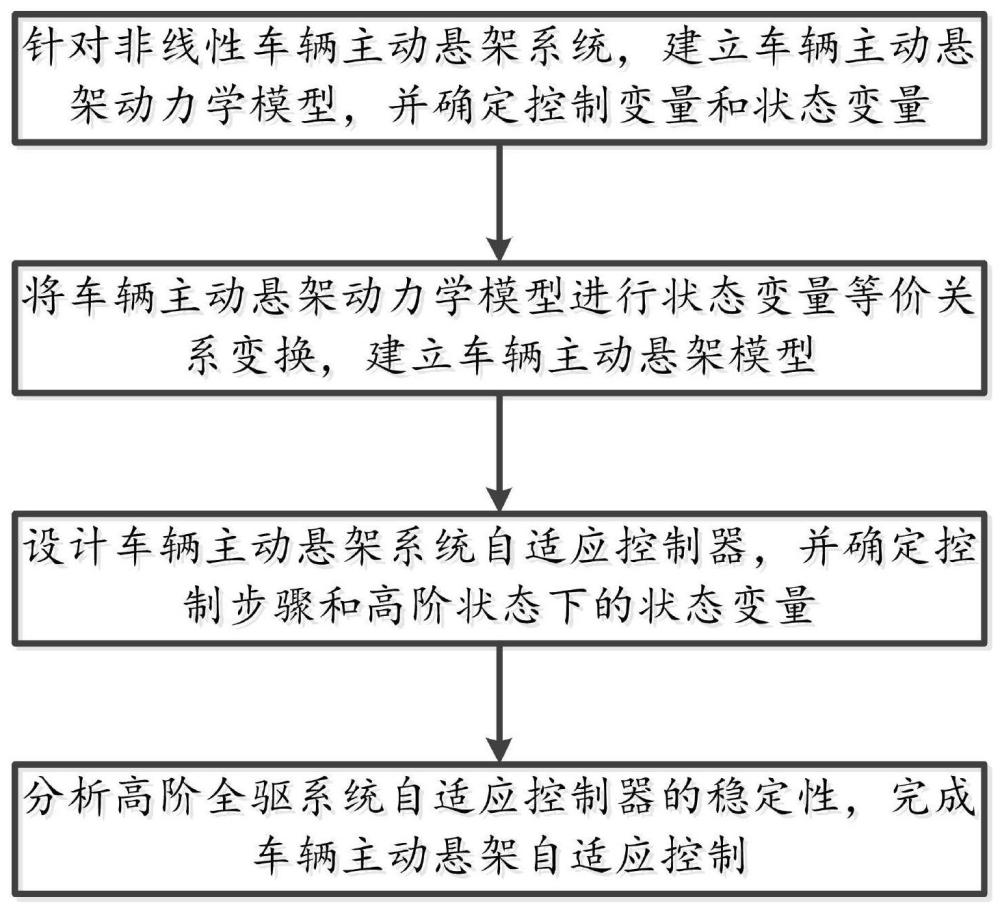
4、s1:针对非线性车辆主动悬架系统,建立车辆主动悬架动力学模型,并确定控制变量和状态变量;
5、对非线性车辆主动悬架系统进行动力学分析,通过牛顿第二定律建立车辆主动悬架动力学模型;明确状态变量为车身位移状态变量x1和悬架位移状态变量x2为主动悬架系统的控制输入量u,不确定路面扰动输入控制变量为ξ;
6、s2:将车辆主动悬架动力学模型进行状态变量等价关系变换,建立基于高阶全驱系统方法的车辆主动悬架模型;
7、将步骤s1中的主动悬架动力学模型转换为全驱系统,进行状态变量等价关系转换,获得基于高阶全驱系统建立的车辆主动悬架模型为:
8、
9、其中:mu为簧下质量即为车轮质量;mb为簧上质量即为车身质量;u为主动悬架系统的控制输入量;ξ为路面扰动输入控制变量,为其一阶导数,为其二阶导数;cs为悬架阻尼系数;kt为轮胎阻尼系数;ks为悬架弹簧刚度系数;z为中间状态变量,为其一阶导数,为其二阶导数,z(3)为其三阶导数,z(4)为其四阶导数;
10、s3:设计基于高阶全驱系统的车辆主动悬架系统的自适应控制器,并确定自适应控制器的控制步骤和高阶状态下的状态变量;
11、s31:进行基于高阶全驱系统方法的车辆主动悬架系统的自适应控制器设计,由步骤s2中的基于高阶全驱系统建立的车辆主动悬架模型,能够得出与自适应控制器对应的高阶状态下的状态变量值,具体包括:第一高阶状态下的状态变量x(4)、第二高阶状态下的变量l(x(0~3))、第三高阶状态下的变量q(x(0~3))和第四高阶状态下的外界不确定性扰动变量ht(x(0~3))θ;
12、s32:将高阶全驱系统的标准方程转换成高阶全驱系统形式的车辆主动悬架物理模型为:
13、
14、其中:为不确定性扰动估计值,为其一阶导数;pl为高阶全驱系统方法中的一个正定矩阵;u*为控制器中的中间等价参数;q(x(0~3))为全驱表达公式中除控制器部分和扰动量部分的表达式;x(0~3)为三阶状态下的状态变量,具体为:a0~3为可调增益矩阵;h为扰动变量前的系数;l为主动悬架系统的控制输入量u的系数;
15、s33:获得车辆主动悬架系统的高阶全驱系统自适应控制器为:
16、
17、其中:a11为第一高阶全驱系统自适应控制参数;a12为第二高阶全驱系统自适应控制参数;a13为第三高阶全驱系统自适应控制参数;a14为第四高阶全驱系统自适应控制参数;a15为第五高阶全驱系统自适应控制参数;a16为第六高阶全驱系统自适应控制参数;a17为第七高阶全驱系统自适应控制参数;
18、s4:分析高阶全驱系统自适应控制器的稳定性,完成基于高阶全驱系统方法的车辆主动悬架自适应控制;
19、设计李雅普诺夫函数,根据步骤s33得到的高阶全驱系统自适应控制器的闭环系统方程,分析其稳定性;获得路面激励模型,将路面激励信号输入到车辆主动悬架物理模型中,驱动车辆主动悬架系统运动。
20、可优选的,步骤s1中对非线性车辆主动悬架系统进行动力学分析,通过牛顿第二定律建立车辆主动悬架动力学模型为:
21、
22、其中:zs为悬架系统静止并且空载时与车身质心平衡位置之间的垂直位移,为其一阶导数,为其二阶导数;zu为悬架的位移,为其一阶导数,为其二阶导数;zr为路面扰动位移输入;
23、对状态变量进行简化表达,令x1=zs,x2=zu,zr=ξ。
24、可优选的,步骤s2中的将步骤s1中的主动悬架动力学模型转换为全驱系统,进行状态变量等价关系转换,具体为:
25、s21:将车辆主动悬架动力学模型能够写为如下表达式:
26、
27、其中:x1为车身位移状态变量,为其一阶导数,为其二阶导数;x2为悬架位移状态变量,为其一阶导数,为其二阶导数;
28、s22:将步骤s21中的两个式子相加后等效于消去控制变量u,能够得到下式:
29、
30、s23:令能够得到下式:
31、
32、s24:由公式且基于该模型的物理背景能够得出:
33、
34、s25:利用步骤s21中的公式和步骤s22中的公式相减,能够得出:
35、
36、s26:由公式能够得出:
37、
38、得到悬架位移状态变量x2与中间状态变量z的表达关系;
39、s27:基于公式能够得出如下方程:
40、
41、带入悬架位移状态变量一阶导数得出如下关系:
42、
43、同理能够得出:
44、
45、s28:将上述得出的公式带入到如下公式中:
46、
47、带入上面公式中的变量等价关系能够得到如下等式:
48、
49、进一步通过化简能够得到下面公式:
50、
51、通过上式得出中间状态变量的四阶导数z(4),能够获得基于高阶全驱系统建立的车辆主动悬架模型。
52、可优选的,步骤s31中自适应控制器对应的高阶状态下的状态变量值的获取方法为:
53、高阶全驱系统的通用表达公式为:
54、x(n)=ht(x(0~n-1))θ+q(x(0~n-1))+l(x(0~n-1))u;
55、其中:x(n)为状态变量的n阶导数;ht(x(0~n-1))为扰动量前的系数;q(x(0~n-1))为n阶除去扰动量部分和控制量部分的表达式;
56、将车辆主动悬架物理模型转为高阶全驱系统,所以将n=4带入到上式中能够得出:
57、x(4)=ht(x(0~3))θ+q(x(0~3))+l(x(0~3))u;
58、其中:x(4)为状态变量的4阶导数;
59、对应到主动悬架物理模型的全驱表达形式后,能够得出下式:
60、
61、通过化简能够得出下式:
62、
63、确定四个高阶状态下的状态变量值如下:
64、第一高阶状态下的状态变量为:
65、x(4)=z(4);
66、第二高阶状态下的变量为:
67、
68、第三高阶状态下的变量为:
69、
70、第四高阶状态下的外界不确定性扰动变量为:
71、ht(x(0~3))θ=0。
72、可优选的,步骤s32中的高阶全驱系统的标准方程为:
73、
74、其中:为不确定性扰动估计值,为其一阶导数。
75、可优选的,步骤s32中控制器中的中间等价参数u*的获取方法为:
76、
77、其中:u*为控制器中的中间等价参数。
78、可优选的,步骤s32中的可调增益矩阵a0~3的获取方法为:
79、基于高阶全驱系统控制器的参数化设计过程中,可调增益矩阵a0~3的计算方法如下:
80、a0~3=-zf4v-1(z,f);
81、其中:z为系统阶数矩阵;f为系统阶数影响矩阵;v(z,f)为可调增益矩阵的参数矩阵;
82、所述可调增益矩阵的参数矩阵v(z,f)的计算方法为:
83、
84、所述系统阶数影响矩阵f的标准形式如下所示:
85、
86、其中:fn-1为系统阶数影响矩阵的n-1次方;a为系统阶数影响矩阵第一参数;b为系统阶数影响矩阵第二参数;c为系统阶数影响矩阵第三参数;d为系统阶数影响矩阵第四参数;
87、通过调整上述四个参数,能进一步使得系统全局收敛镇定,最终确定可调增益矩阵a0~3。
88、可优选的,步骤s33中的车辆主动悬架系统的高阶全驱系统自适应控制器包括以下七个参数,这些参数均与车辆主动悬架系统的物理参数有关,具体为:
89、第一高阶全驱系统自适应控制器参数a11为:
90、a11=kt;
91、第二高阶全驱系统自适应控制器参数a12为:
92、
93、第三高阶全驱系统自适应控制器参数a13为:
94、
95、第四高阶全驱系统自适应控制器参数a14为:
96、
97、第五高阶全驱系统自适应控制器参数a15为:
98、
99、第六高阶全驱系统自适应控制器参数a16为:
100、
101、第七高阶全驱系统自适应控制器参数a17为:
102、
103、可优选的,步骤s4中设计李雅普诺夫函数,根据步骤s33得到的高阶全驱系统自适应控制器的闭环系统方程,分析其稳定性,具体为:
104、s41:高阶全驱系统自适应控制器的闭环系统方程如下:
105、
106、其中:a0~n-1为n阶可调增益矩阵,具体为a0~n-1=[a0 a1 ... an-1];x(0~n-1)为n阶状态下的状态变量,为其导数;φ为状态变量影响函数;0(n-1)r为n阶常数项参数;
107、s42:根据高阶全驱系统自适应控制器的闭环系统方程设计李雅普诺夫函数为:
108、
109、其中:v为李雅普诺夫函数;为李雅普诺夫函数的一阶导数;p为高阶全驱系统方法中的正定矩阵;
110、s43:对李雅普诺夫函数进行求导,当导数小于0时,能够得出高阶全驱系统自适应控制器为稳定的。
111、与现有技术相比,本发明具有以下有益效果:
112、(1)本发明中提出的方法与传统的车辆主动悬架控制方法相比,该方法不再基于状态空间模型进行分析和设计控制器,而是基于物理模型直接进行控制器设计,使得控制器设计过程简单。
113、(2)本发明结合参数化设计方法,参数求解过程数值稳定,并通过仿真验证证明了所提出的基于高阶全驱系统的自适应控制方案能够实现在有限时域内的快速稳定。
114、(3)本发明通过模型搭建和仿真验证,证明了所提出的扩张状态观测器补偿的基于高阶全驱系统方法的主动悬架自适应控制方案的有效性,控制后的主动悬架系统能够明显降低超调,实现有限时域内快速收敛且保持着较好的跟踪效果。
- 还没有人留言评论。精彩留言会获得点赞!